[CVPR 2022 | 论文简读] 点云的表面表示


作者 | 汪逢生 编辑 | 赵晏浠
论文题目
Surface Representation for Point Clouds
论文摘要
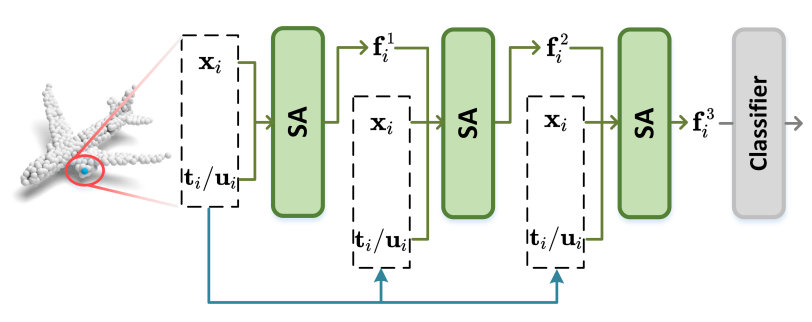
多数先前的工作通过坐标表示点云的形状。然而,直接利用坐标描述局部几何是不充分的。在本文中,作者提出了 RepSurf(representative surface),这是一种新颖的点云表示,显式的描述了非常局部的点云结构。 作者探索了 RepSurf 的两种变体,Triangular RepSurf 和 Umbrella RepSurf,其灵感来自计算机图形学中的三角形网格和伞形曲率。作者在表面重建后通过预定义的几何先验计算 RepSurf 的表征。RepSurf 可以成为绝大多数点云模型的即插即用模块,这要归功于它与无规则点集的自由协作。 基于 PointNet++(SSG 版本)的简单基线,Umbrella RepSurf 在各种基准上的分类、分割和检测在性能和效率方面都大大超过了之前的先进方法。在只有0.008M参数数量、0.04G FLOPs 和 1.12ms推理时间的增的情况下,作者的方法在分类数据集 ModelNet40 上达到 94.7% (+0.5%),在 ScanObjectNN 上达到 84.6% (+1.8%) ;而在分割任务的 S3DIS 6-fold 上达到74.3%(+0.8%) mIoU,在ScanNet 上达到70.0% (+1.6%) mIoU 。对于检测任务,作者的 RepSurf 应用于最先进的检测器,并在 ScanNetV2 上达到71.2% (+2.1%) mAP25、54.8% (+2.0%) mAP50 和在 SUN RGB-D数据集上64.9% (+1.9%) mAP25、47.7% (+ 2.5%) mAP50的性能。作者的轻量级Triangular RepSurf 在这些基准测试中同样表现出色。
论文链接
http://arxiv.org/abs/2205.05740
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2022-10-01,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号