几何非线性| 桁架单元(一)


在上篇几何非线性| 应变张量,得到拉格朗日应变表达式为
用指标记法
对于杆系结构,有
拉格朗日应变适用于描述几何非线性。
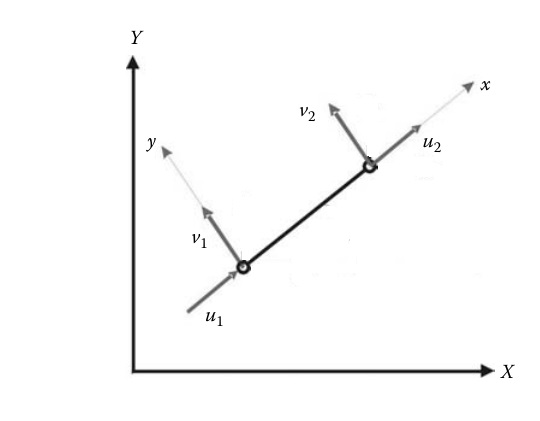
▲图1
如图1所示的桁架单元,局部坐标下的位移插值
其中,
是单元节点位移矩阵。
拉格朗日应变
虚位移
虚应变
这里,(6)用到了变分运算公式
内力虚功为
记
则
由(6)可得
应力
由(8)(10)(11)可得
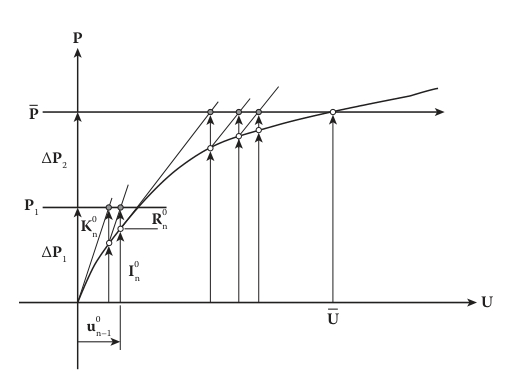
▲图2
如图2所示的非线性迭代过程,当某一迭代步
达到收敛标准时,可以认为处于平衡状态,即
式中
是结构内力,
是外荷载,
是
迭代步时的节点位移。
迭代步时的内力用一阶泰勒展开
由(13)(14)得
记
其中,
叫做切线刚度矩阵,(15)可写成
是内力的导数,
是新的荷载步下的外荷载。
其中
叫做初始刚度矩阵,
叫做几何刚度矩阵。对于桁架单元
几何刚度矩阵
其中
同理
最终得到局部坐标下的切线刚度矩阵为
局部坐标和整体坐标下的节点位移转换关系
整体坐标下的切线刚度矩阵
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2024-05-06,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号