几何非线性| 应变张量


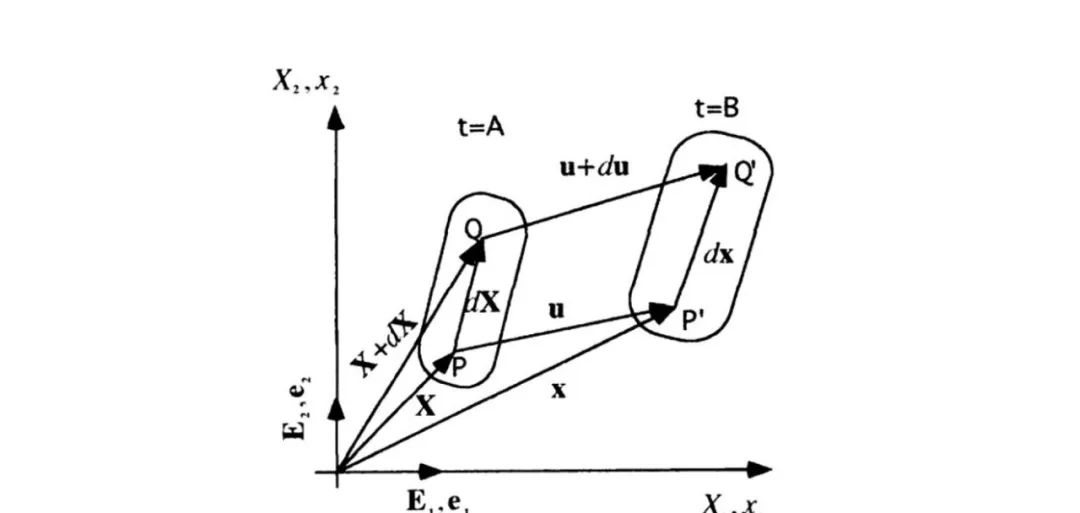
考虑二维空间中的一个连续体,分别是其中的两个物质点,如图3.1所示。在连续体变形前(时刻)引入物质坐标系,另外,在连续体变形之后(时刻)引入空间坐标系。两个坐标系相关的基向量分别为和。
按照描述,位置矢量
位移矢量
变形前后的位置矢量之间的关系为
使用坐标系,变形后的物体中任意点的位置矢量:
变形前的在变形后移动到新的位置,记
于是
定义梯度算子
则
其中,叫做变形梯度,叫做位移梯度。
由(3)可得
定义应变
则
由(9)可得
则
展开,得
忽略高阶量,线性化的拉格朗日应变张量为
[例1] 给出如下的运动
则由得
作求导运算
位移梯度
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2024-04-28,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号