有限元 | 弹性支座


考虑一段一端由线性弹簧支撑的细长梁,如图1所示,弹簧刚度为
,则弹簧的应变能为

▲图1
其中,
是梁在
处的挠度。
梁的势能为
现在来求
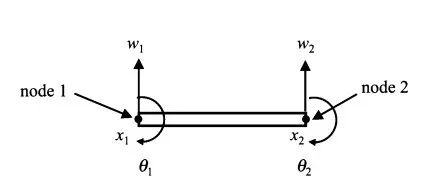
▲图2
如图2所示的两节点梁单元,
分别为四个节点自由度。物理坐标系
和自然坐标系
的线性映射关系
在节点1的位置时
,在节点2的位置时
。挠度由三次多项式表示为
梁的转角
其中,
为单元长度。在节点1的位置时
,由(2)(3)可得
在节点2的位置时
,由(2)(3)可得
(4.1)~(4.4)联立解得
(5)代入(2)得
其中
记
,(6)写成矩阵形式
由(3)可知,梁的广义应变(曲率)
记
则
其中
是应变矩阵。应力
由(7)(8)可知,(1)中的
就是
时
的值。
梁单元势能的表达式
其中 记
经计算得
对于具有弹性支承的单元,只需将
加入到常规单元刚度矩阵中。
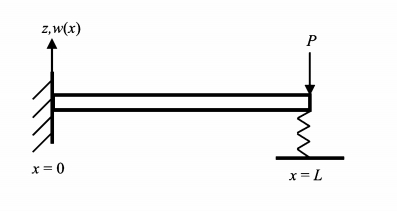
▲图3
对于图3所示得梁,弹簧刚度为
。只划分一个单元时,其有限元平衡方程为
考虑边界条件之后
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2024-04-08,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号