编码智能体做 CV 任务,实际能力到哪一步了?——五项视觉任务实测解读
原创
编码智能体做 CV 任务,实际能力到哪一步了?——五项视觉任务实测解读
原创
CoovallyAIHub
发布于 2026-03-24 09:40:48
发布于 2026-03-24 09:40:48
导读
编码智能体(Coding Agent)能自动写代码、跑脚本、调 bug、迭代优化,但如果交给它一个视觉任务——比如数一张图里有多少只鸟、从视频里跟踪计数车辆、识别车牌——它能做到什么程度?
最近,一个计算机视觉团队做了一组系统测试:用 5 个典型的 CV 任务,分别测试了 Claude Code、Gemini-CLI 和 OpenAI Codex 三个主流编码智能体的实际表现。测试覆盖了图像目标计数、视频多目标跟踪、实时流处理和车牌识别(OCR)等场景,评分维度包括速度和准确度。
这组测试的价值不在于"哪个 Agent 最强",而在于它提供了一组具体的观察窗口:编码智能体在 CV 任务上的能力边界在哪里?它们的策略差异体现了什么?哪些类型的视觉任务已经可以交给 Agent,哪些还差得远?
本文基于完整的测试数据,逐项还原评测过程,并在最后给出我们的分析。

图片
来源于 Roboflow Blog 原文
一、评测设置
评分规则
得分由速度分(1 分钟以内最高 0.3 分)和准确度分(最高 0.7 分,按任务具体评估)相加得出。准确度权重远高于速度,体现了 CV 任务"做对比做快更重要"的特点。
调用方式
所有智能体均通过命令行调用:
claude --dangerously-skip-permissions --verbose --output-format stream-json [prompt]
codex -a never exec --sandbox workspace-write -c features.search=true [prompt]
gemini --yolo --output-format stream-json [prompt]二、五项任务逐项还原
任务 1 — 使用 SAM3 计数图片中的鸟
提示词:使用 SAM3 对提供的图片 'birds_sam3.jpg'(已在工作区中)中的鸟进行标注。统计检测数量并打印计数结果。将计数结果以数字形式写入 'output.txt' 文件。

图片
来源于 Roboflow Blog 原文
结果:
- Gemini / Claude:都使用了 sam3 的 Python 包,并且都对 PositionEmbeddingSine 层进行了补丁修改以使用 CPU(评估在 macOS 上运行)
- Codex:忽略了使用 SAM3 的指令,尝试使用标准的 COCO 预训练检测器,鸟的计数结果有误
获胜者:Claude / Gemini
关键观察:当 prompt 明确指定使用某个工具时,Claude 和 Gemini 都能遵循指令并解决环境兼容性问题(自动打补丁适配 CPU)。Codex 则直接忽略了工具指定,这不是能力问题,而是指令遵循问题。
任务 2 — 计数视频文件中的汽车
视频片段长 10 秒,实际约有 150-200 辆车。计数在 50-100 和 200-300 之间可获得部分得分。
来源于 Roboflow Blog 原文
提示词:使用 Python 脚本统计视频 'cars-aerial-view.mp4'(已在工作区中)中不重复的汽车总数。将最终数字输出到名为 'output.txt' 的文件中。
结果:
- Claude:编写并运行了脚本,使用 BoTSORT 跟踪器计数 270 辆车
- Gemini:使用基于 COCO 的检测器计数 37 辆车
- Codex:使用基于 COCO 的检测器计数 48 辆车
获胜者:Claude
关键观察:视频中的"不重复计数"需要检测+跟踪两步配合。Claude 主动选择了 BoTSORT(一种多目标跟踪算法),具备跨帧关联同一目标的能力,因此能给出一个量级合理的数字(尽管 270 相比真实值 150-200 仍高估了 35%-80%)。Gemini 和 Codex 使用的 COCO 检测器是针对单帧的目标检测模型,缺少跨帧跟踪能力,在航拍小目标场景下检出率也有限,导致严重漏计(37 和 48)。这个任务说明:即使是"获胜"的 Agent,绝对精度也远未达到可直接用于生产的水平,但它在技术选型上的判断(知道需要跟踪器)明显优于其他两个。
任务 3 — 计数 RTSP 实时流中的汽车
与任务 2 类似,但在实时流上评估,推理速度至关重要。使用 mediamtx 通过 RTSP 循环播放视频,要求推理帧率大于 10 fps。
提示词:我有一个 RTSP 流,地址为 rtsp://localhost:8554/stream。我想使用 Python 脚本统计 15 秒视频中的汽车总数。同时测量推理 FPS,如果低于 10fps 则使用更小/更快的模型。在最后将结果打印到控制台。将不重复的汽车最终数量输出到名为 'output.txt' 的文件中!视频是车辆停车场的航拍/俯视视角。
结果:
- Claude:使用了 COCO 检测器并制作了一个简单的基于 IoU 的跟踪器,计数 86 辆车
- Gemini:尝试了不同大小的模型配合现成的跟踪器,但只计数了 29 辆车。可能是置信度阈值设置过高
- Codex:仅生成了 Python 脚本,但没有按照指令实际运行它
获胜者:Claude
关键观察:实时流增加了"速度约束"这一维度。Claude 选择了轻量方案(IoU 跟踪替代 BoTSORT),体现了对性能约束的理解。Codex 在这个任务上暴露了一个反复出现的模式:只写代码不执行。
任务 4 — 计数图片中的牛油果
与任务 1 类似,但没有指定使用哪个工具。实际数量约 55 个,越接近 55 得分越高。
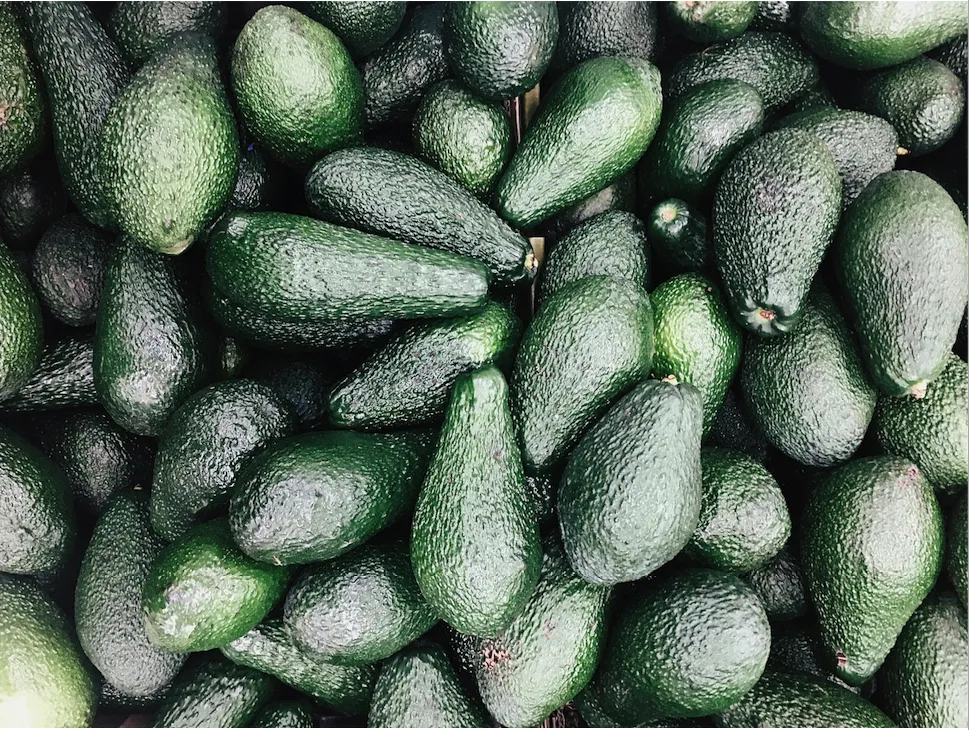
图片
来源于 Roboflow Blog 原文
结果:
- Claude:使用 YOLO World 尝试了不同的置信度阈值,标注了牛油果(绘制了边界框),然后使用 LLM 验证标注后的图片。消耗了大量 token,计数结果为 54 个
- Gemini:使用了类似的方法,但在 10 分钟后超时
- Codex:使用了类似的方法,计数 43 个(没有进行验证)。因为没有做验证所以速度更快,总分更高
获胜者:Claude / Codex
关键观察:这个任务有两个技术点值得展开。第一,Claude 选用了 YOLO World——这是一种开放词汇检测器(Open-Vocabulary Detector),能检测训练集类别之外的目标。"牛油果"不在标准 COCO 的 80 个类别中,选用 YOLO World 说明 Agent 具备根据目标类别选择合适模型的能力。第二,Claude 在检测之后主动调用 LLM 对标注图进行二次验证,最终计数 54(真实值 55),几乎命中。这种"检测→验证→修正"的闭环行为不是 prompt 要求的,而是 Agent 自发的策略,代价是消耗更多 token 和时间,但换来了显著更高的准确度。
任务 5 — 车牌识别(LPR)
这是一个多步骤的复合任务:检测车辆 → 定位车牌 → 裁剪保存 → OCR 识别 → 输出结果。

图片
来源于 Roboflow Blog 原文
提示词:编写一个 Python 脚本,从工作区中提供的图片 'cars-highway.png' 中检测并识别车牌。脚本应:
- 检测车辆和车牌
- 裁剪每个检测到的车牌,并将裁剪结果保存为图片文件到 'results/' 文件夹
- 对每个车牌运行 OCR/LPR 以提取文本(不含空格或特殊字符)
- 将所有车牌号码保存到 'result.txt' 文件中,以逗号分隔,不加引号。
结果:
- Claude:使用在 COCO 上训练的检测器进行车辆检测,尝试使用经典 CV 方法(阈值分割/轮廓检测)进行车牌检测,并使用 easyocr/pytesseract 进行识别。最终超时
- Gemini:使用基于 COCO 的检测器进行车辆检测,使用 HuggingFace Hub 上的 yasirfaizahmed/license-plate-object-detection 模型进行车牌检测,并使用 easyocr 进行识别。正确识别了 3 个车牌中的 2 个
- Codex:仅编写了脚本但没有运行(忽略了指令)
获胜者:Gemini
关键观察:这是唯一一个 Claude 失败的任务。Claude 选择了经典 CV 方法(阈值分割+轮廓检测)来做车牌定位——这类方法对光照变化、拍摄角度、车牌样式差异非常敏感,在非受控场景中很难鲁棒工作,最终导致超时。Gemini 则直接从 HuggingFace Hub 搜索并调用了一个专门训练过的车牌检测模型,跳过了手工特征工程,策略更高效。这说明:在需要专用模型的子任务上,Agent 能否主动搜索和调用社区预训练模型,比自己用经典方法从头搭建更可靠。
三、跳出单项结果看整体:四个值得关注的发现
1. Agent 的技术选型能力差异很大,直接决定成败
五项任务中,Agent 之间的差距往往不在于"代码写得好不好",而在于"选了什么模型和方法"。Claude 在任务 2 中选择 BoTSORT 做跟踪、在任务 4 中选择 YOLO World 做开放词汇检测,Gemini 在任务 5 中从 HuggingFace 搜索专用车牌检测模型——这些关键选型直接决定了任务能否完成。反过来,Claude 在任务 5 中选择经典 CV 方法做车牌定位,直接导致超时失败。Agent 对 CV 工具链的掌握深度,目前是能力差距的主要来源。
2. "自验证"是有效但昂贵的策略
在任务 4 中,Claude 主动用 LLM 验证检测结果,最终精度几乎命中真实值(54 vs 55)。这种"检测→验证→修正"的闭环行为是 Agent 自发的,不是 prompt 要求的。但代价也很明显:更多 token 消耗和更长的执行时间。在对精度要求高但不赶时间的场景下,这种策略很有价值。
3. 指令遵循比模型能力更影响结果
Codex 在 5 个任务中有 2 个只写了代码不运行,直接拿了零分。这不是"做不到",而是"没按要求做"。在实际使用中,如果一个 Agent 不能可靠地执行完整的"写代码→运行→看结果→调整"的循环,那它的模型能力再强也无法转化为有效输出。
4. 即使"获胜",绝对精度也需要审慎看待
Claude 在任务 2 中以 270 辆车的计数"获胜",但真实值是 150-200,误差达 35%-80%。任务 3 中计数 86 辆也明显偏低。这意味着:在这组测试的评分体系中表现最好,不等于结果可以直接用于生产。对于工业级 CV 应用,Agent 的输出仍然需要人工校验。
四、对 Agent+CV 实践的启示
这组测试给出的信号是:编码智能体已经能够在 CV 任务上走完"选模型→写代码→跑通→出结果"的全流程,但输出质量因任务复杂度和 Agent 的技术选型能力而有很大波动。
需要注意这组测试本身的局限:每个 Agent 每个任务只运行了一次,没有多次取均值;评估环境为 macOS CPU(无 GPU),不是 CV 模型的典型部署环境;5 个任务中 3 个是"计数",任务类型覆盖偏窄。这些因素意味着测试结果不宜过度泛化。
基于现有数据,对开发者的建议:
- 单步 CV 任务(检测、计数、标注)可以让编码 Agent 快速出原型,但输出精度需要人工校验,不宜直接用于对准确率有严格要求的场景
- 多步骤流水线(如检测→定位→裁剪→OCR)建议拆成独立子任务,让 Agent 逐步完成,人工检查中间结果
- Prompt 中尽量指定要使用的模型或工具,或明确提示 Agent 去 HuggingFace 等平台搜索专用模型,减少 Agent 自行选择经典方法走弯路的概率
- 对于需要跟踪的视频任务,在 prompt 中提示"需要多目标跟踪"可以帮助 Agent 做出更合理的技术选型
参考来源
- 原文:Erik Kokalj, Which is the Best Coding Agent for Vision tasks?, Roboflow Blog
- 链接:https://blog.roboflow.com/best-coding-agent-for-vision-ai/
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号