震惊,MPS居然搞起来了这个东西!

说起 MPS,大家肯定熟悉,老电源玩家了,但是我今天逛电机展的时候,居然也看到了 MPS,不对劲,100 分的不对劲(他们在电击展展啥?MOS 管?好像也没有这个线):

被我拍的皱皱巴巴
被我拍的皱皱巴巴

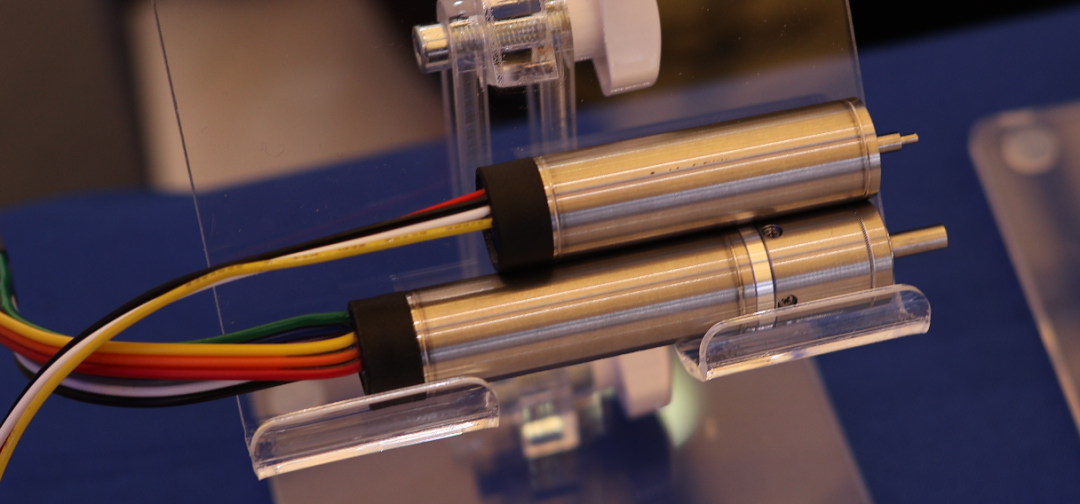
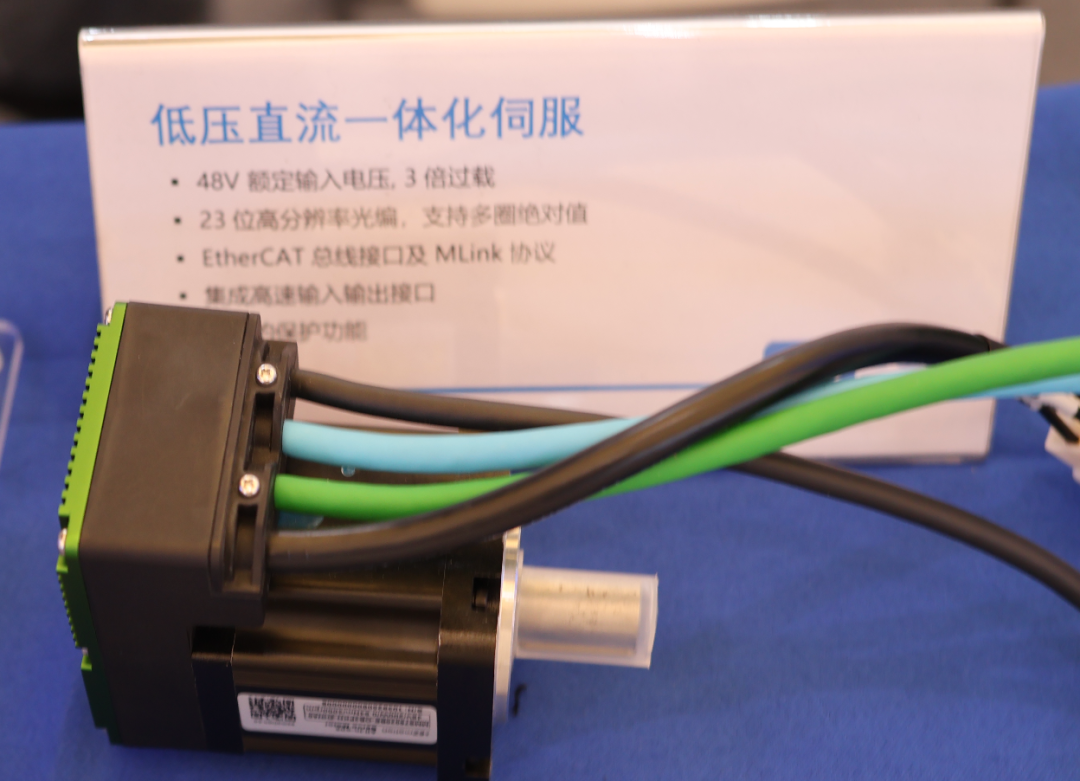
这个吧,这个拍的比较正规
这个吧,这个拍的比较正规
仔细的研究了一下,原来是集成化的电机解决方案:

这次的展位不大,俩张桌子,但是还是很紧凑的
这次的展位不大,俩张桌子,但是还是很紧凑的
整场逛下来,MPS 的展位居然是除仪器以外,半导体最浓的地方。
先来看看展品
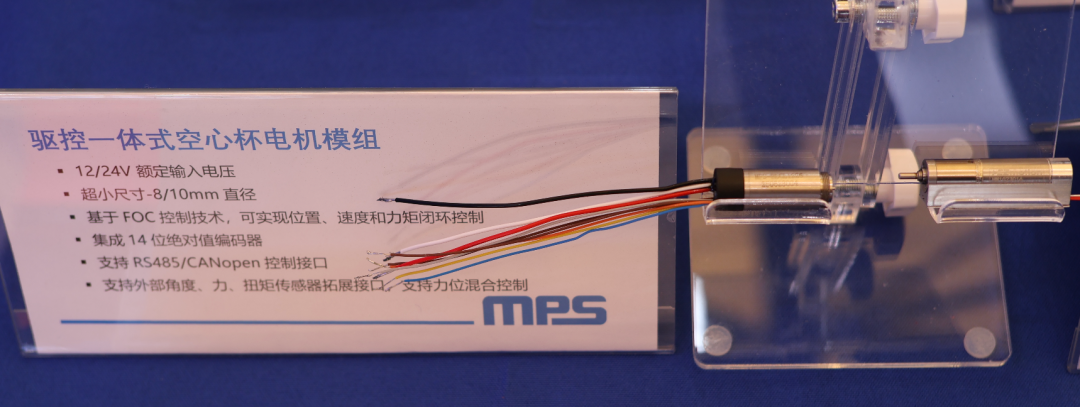
image-20251125141011844
现在已经发展到,就算是空心杯电机都要用 FOC 控制了,还有编码器,对了! 可以给最新的机器人灵巧手用:

大概就是这样
大概就是这样
看看实际的手是什么样子的?

可以看到还是这种传统的电机和齿轮方案
可以看到还是这种传统的电机和齿轮方案

非常的精密
非常的精密

最灵活的大拇指部分
最灵活的大拇指部分
这么小的空间,当然是对电机提出来非常高的要求。
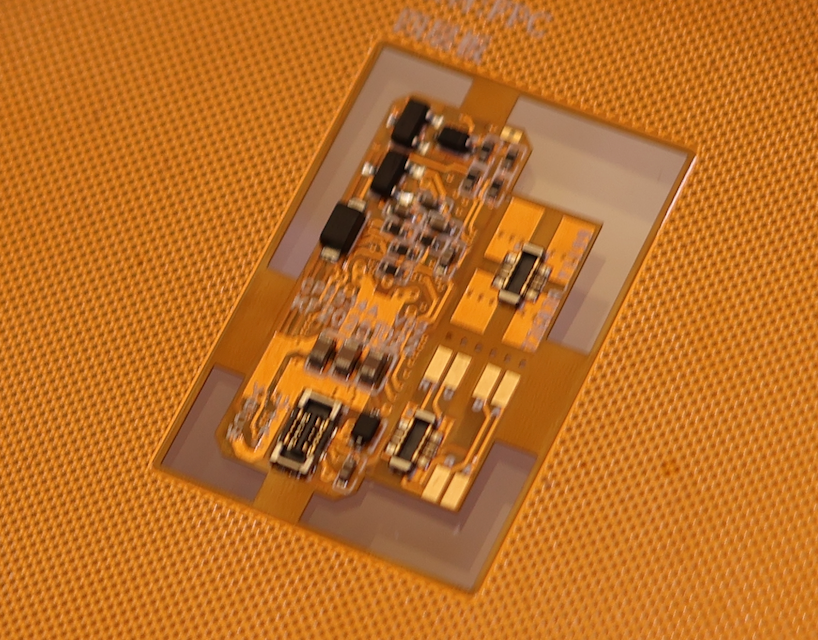
现在对灵巧手驱动这块也有使用 FPC 的方案,因为体积要求实在是太高了
现在对灵巧手驱动这块也有使用 FPC 的方案,因为体积要求实在是太高了

也有这种传统的后置,但是还是体积太大了,还需要自己装角度传感器
也有这种传统的后置,但是还是体积太大了,还需要自己装角度传感器
从工程上面看,其实也没有什么大必要。

注意到 EZmotion
注意到 EZmotion

是激光刻蚀
是激光刻蚀
研究一下,这个 Logo,看着应该是一个公司:
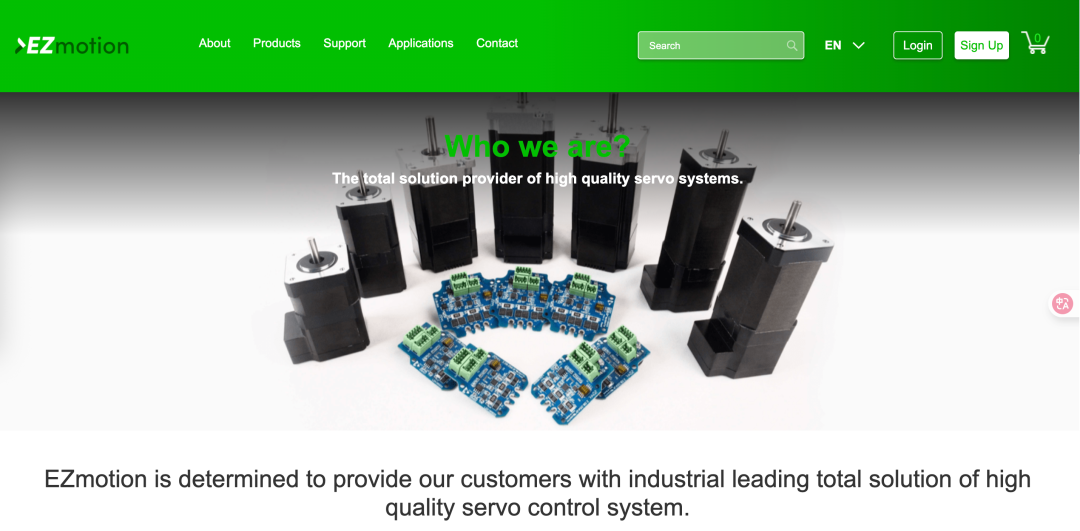
提供整体方案的公司
提供整体方案的公司

在下面注意到也是 MPS 的
在下面注意到也是 MPS 的
这个网站卖的是集成电机的产品:
传统电机通常体积庞大、价格昂贵且结构复杂,因为它需要整个系统中多个独立组件之间的协作。由于组件较多,传统解决方案需要进行大量测试来调整系统配置并确定基本参数。集成智能电机的引入则简化了这个繁琐的过程。它更加紧凑,所需空间和缆线都比传统电机更少,而且还可以通过图形用户界面(GUI)实现自动配置和更新。传统电机系统包括了电机、控制器、驱动电源、反馈器件以及复杂的电缆网络,设计人员通常需要花费大量时间来确定电机、驱动器、电缆和电路之间的最佳配置。这些额外的测试增加了设计成本并延长了上市时间。此外,传统电机系统尺寸较大,有可能让其他关键组件无法安装到有限的空间中。
相比之下,集成智能电机仅需三个基本组件:电机、控制器和反馈器件(见下图)。这种电机可以根据一些主要标准进行选择,例如尺寸、功率、IP等级、连接类型及其通信协议类型。
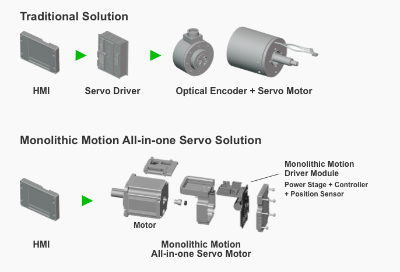
其实就是完全集成,做到让用户开箱即用
其实就是完全集成,做到让用户开箱即用
分析MPS完整机器人解决方案
MPS 给了我一份册子,我看了下感觉还是挺有干货的,除去 MPS 的产品介绍,居然还有一点电机学知识,而且对于我们了解产品来说还必不可少,所以下面也出现了这部分内容,即使不看官方文档也能学到新知识!
这是 MPS(Monolithic Power Systems)空心杯无刷电机(BLDC coreless motor)及驱动/磁编码器方案 的展会资料,面向:
人形机器人与灵巧手,医疗器械,工业自动化,高速工具,高精度传感检测,机器人关节模块/舵机 OEM 厂商
它同时提供:
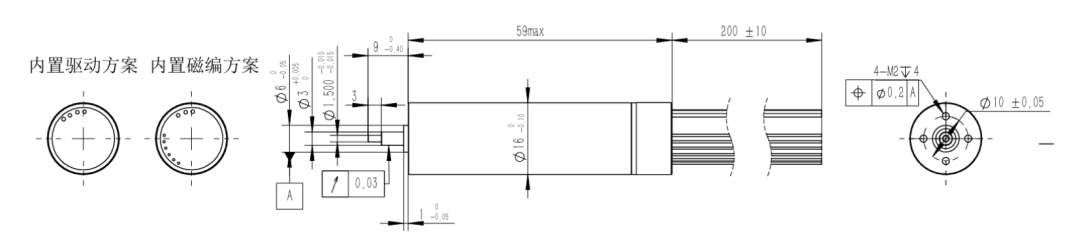
- 空心杯 BLDC 电机本体(12mm、16mm)
- 内置驱动方案(FOC)
- 内置磁编码器方案(1~4096PPR)

应用场景解读
应用场景解读
页面展示了 MPS 空心杯电机适配的行业;核心关键词:高速、高加速度、高控制性、高功率密度、小体积、低震动。
为什么空心杯电机适合这些场景?
空心杯转子没有铁芯 → 无齿槽效应 → 超低振动 + 响应快
对行业对应的优势:
应用 | 空心杯优势 |
|---|---|
灵巧手、机器人关节 | 轻量、高转矩密度、FOC 控制细腻、无齿槽适合小力矩控制 |
医疗设备(呼吸机/心脏泵) | 低噪音、高可靠、可 24h 连续工作 |
牙科/骨科高速工具 | 小型高速电机(2~7 万 rpm)必须使用空心杯 |
工业量测(3D 扫描/全站仪) | 极低转动惯量 → 角位置控制极为平滑 |
安防摄像/云台 | 微力矩输出、低震动、速度闭环效果佳 |
这页是电机工作原理课程级内容,非常重要。
电机能量转换公式
电机把电能转为机械能,能量守恒:
意味着:电能 → 机械输出 + 铜损(焦耳热),空心杯 BLDC 没有铁损,因此模型比普通 BLDC 更干净
转速常数 与转矩常数
页面非常关键的一句话:
对于 MPS 电机来说,转矩与电流是等同的(线性关系)
也就是:
这在控制上极其重要:
只需要控制电流,就等于控制力矩,这为 FOC(磁场定向控制)提供极高的可控性
意味着:转速与反电动势成正比,转速越高,反电动势越高
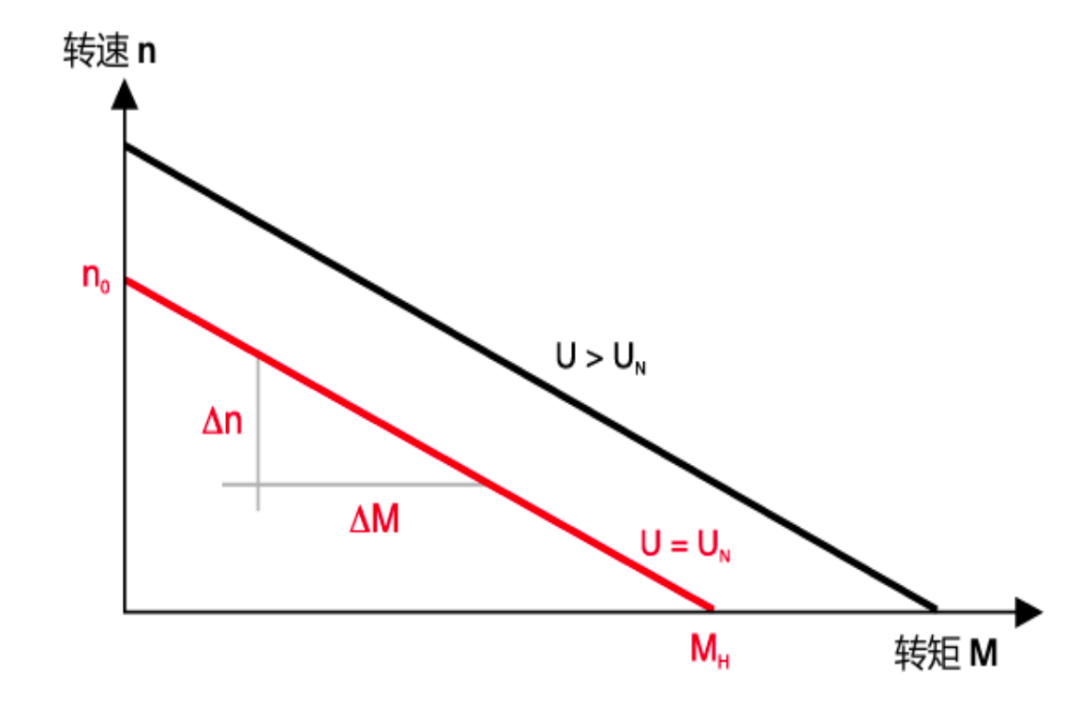
电机理论与特性曲线
上图解释典型直流电机线性特性:
无载时速度最高(n0),加负载 → 电流增加 → 速度线性下降;到堵转时速度为 0、力矩最大(MH)
斜率:
注意: 斜率固定,与电压无关(只是整条线上下平移)。
MPS 12mm 空心杯电机解读
MPS 12mm 空心杯电机解读
规格:Ø12 mm,空心杯 BLDC,1.8 mNm,18000 rpm
性能参数重点
参数 | 含义与工程点评 |
|---|---|
转矩常数 4.85 mNm/A | 很高,小电流即可以输出力矩 |
速度常数 1970 rpm/V | 12V 时理论空载≈23k rpm(档案给 25k rpm,非常吻合) |
堵转力矩 11.5 mNm | 对应堵转电流 2.4A |
最大效率 72% | 对 mini BLDC 属正常水平 |
机械时间常数 3.86 ms | 响应速度快,适合激烈动作(机器人手指) |
热参数
这部分非常关键,用于判断:能不能长时间高负载,电机是否需要散热片,需要降额多少
关键热阻:
绕组→机壳 3 K/W(非常低)
机壳→空气 40.6 K/W
说明散热能力有限——外壳散热最差。
因此:若要持续大力矩 → 必须改善散热(风冷/金属外壳);负载设计必须考虑温升

内置驱动方案(RS485 接口)
红(Vcc)
黑(GND)
白(A)
黄(B);此为带内部 FOC 驱动、通过 RS485 通信控制速度/位置的版本。
内置磁编码器(UVW + A/B/Z)方案
线序包括:
U/V/W(电机三相)
Vin(编码器电源)
A/B/Z(Quadrature 编码器)
Pulse_in(可用于校准/对齐)

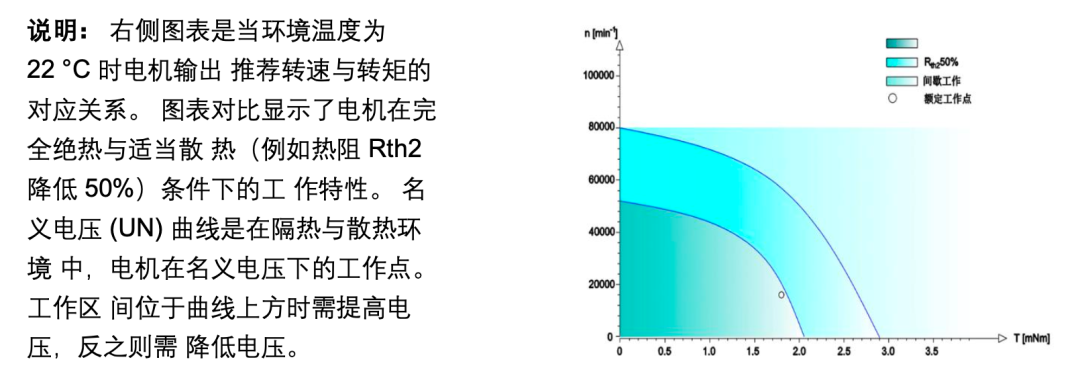
工作区解析
工作区解析
右侧说明(非常重要):
曲线显示在 22°C 时,电机输出转速-转矩关系;绝热与散热条件不同会让曲线不同。
意思是:良好散热 → 持续输出能力更强;曲线右移(更大转矩点);若工作点高于名义曲线 → 必须提高电压;若工作点低于曲线 → 应降低电压(过高电压会过热)
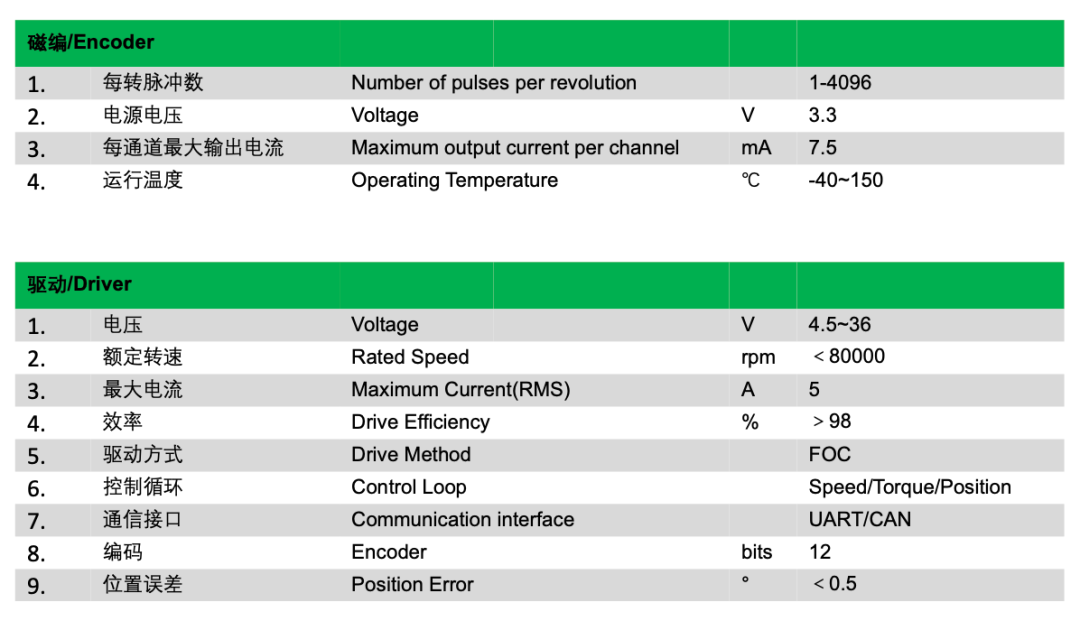
磁编码器 + FOC 驱动
磁编码器 + FOC 驱动
磁编码器
分辨率:1–4096 PPR(可编程)
电压 3.3V
-40~150°C
输出每通道 7.5mA
4096PPR(即 12bit)常用于:机器人关节定位;精密仪器旋转轴;高速同步检测
内置驱动器(FOC)
项目 | 参数 | 工程含义 |
|---|---|---|
驱动电压 | 4.5~36V | 可用于 12/24/36V 系统 |
最大电流 | 3A RMS | 对应输出 ≈ 15 mNm 级别 |
驱动效率 >98% | FOC + GaN/MOSFET 优化 | 超低损耗 |
控制模式 | 速度/力矩/位置闭环 | 适合机器人/自动化 |
通信 | UART/CAN | 工控友好 |
编码器 12bit | 内置磁编闭环控制 | 转子角度精确 |
此页说明电机+驱动+编码器三合一方案是 MPS 的主推方案。
16 mm 空心杯电机
16 mm 空心杯电机
Ø16 mm,13.5 mNm,54000 rpm属于高速强力款,适合:医疗牙科高速手机,工具打磨类,小型高速涡轮,机器人加速关节。
这个是可以跑到 5W 转的产品,长的是带了减速箱,20:1
这个是可以跑到 5W 转的产品,长的是带了减速箱,20:1
在比如医疗上面,牙科或者骨科的高速转头上面是非常合适的。
参数 | 工程解读 |
|---|---|
电阻仅 0.44Ω | 说明为大电流高速电机 |
空载 430mA | 高速电机典型特征 |
堵转电流 54.55A | 必须做好限流保护! |
堵转转矩 212 mNm | 输出能力极强 |
机械时间常数 3.79 ms | 响应快 |
噪声 55 dB(50k rpm) | 对高速工具非常优秀 |
热阻:绕组→机壳仅 0.75 K/W,机壳→环境 13.3 K/W(不错);说明其散热性能整体比 12mm 版本好得多,能更长时间维持高转速。
空心杯 BLDC 的优势
无铁芯 → 无齿槽 → 极致平滑力矩控制;转子轻 → 惯量低 → 加减速快;高频响应能力强 → 医疗/工具行业首选
MPS 的优势
电机 + 驱动 + 编码器 = 完整模块
电机 + 驱动 + 编码器 = 完整模块
FOC 内置,CAN/UART 工控接口,最高 80,000 rpm;适合未来做机器人、医疗、自动化的全套方案。
对资料感兴趣的也可以扫描二维码获得(也可以点击跳转原文链接):

这里
这里
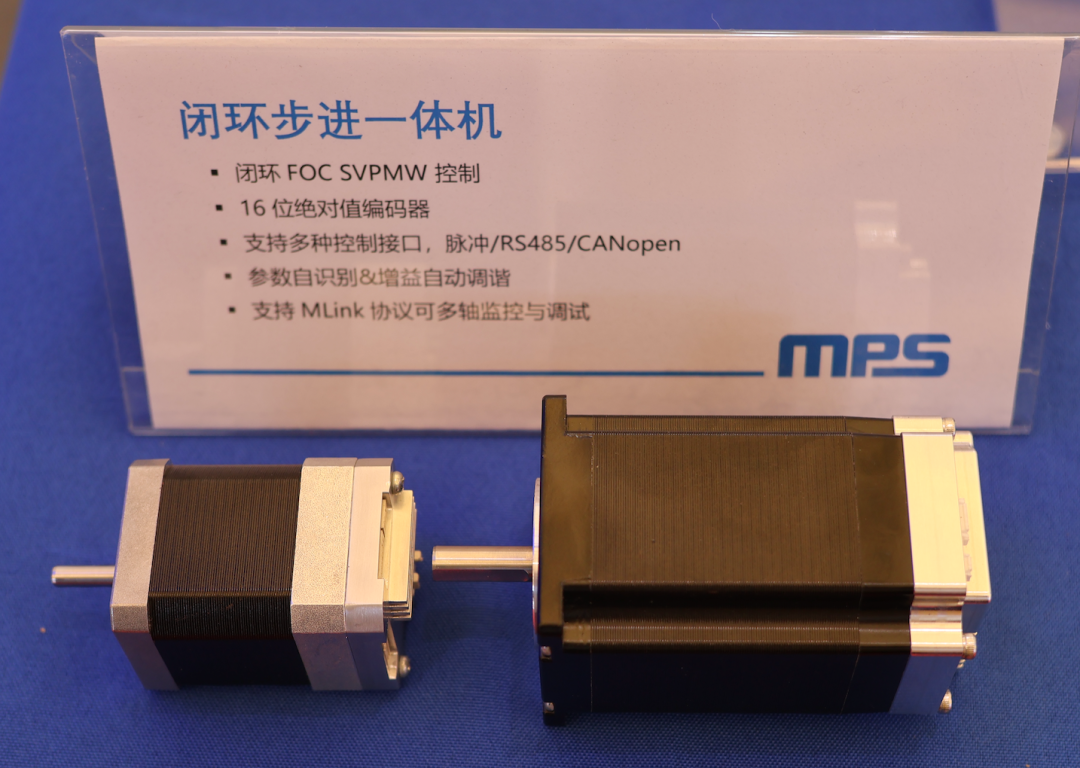
其实这款就这样的产品
其实这款就这样的产品
当然了这些都是大的步进电机,在一些需要高转速,小体积的产品,空心杯电机是不二之选,可以看上面。
这个和上面类似的模组
这个和上面类似的模组

image-20251125141040093

image-20251125141057041
看着这个封装就已经不高兴了
看着这个封装就已经不高兴了
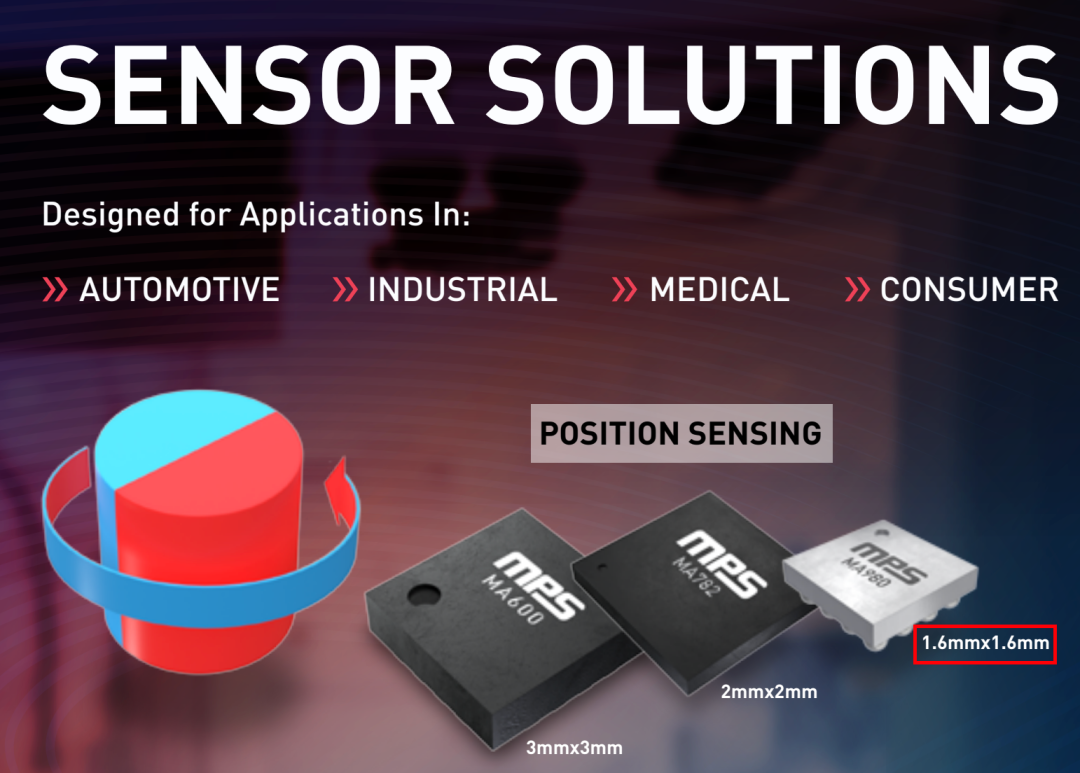
这也是 MPS 传感器解决方案里面体积最小的
这也是 MPS 传感器解决方案里面体积最小的
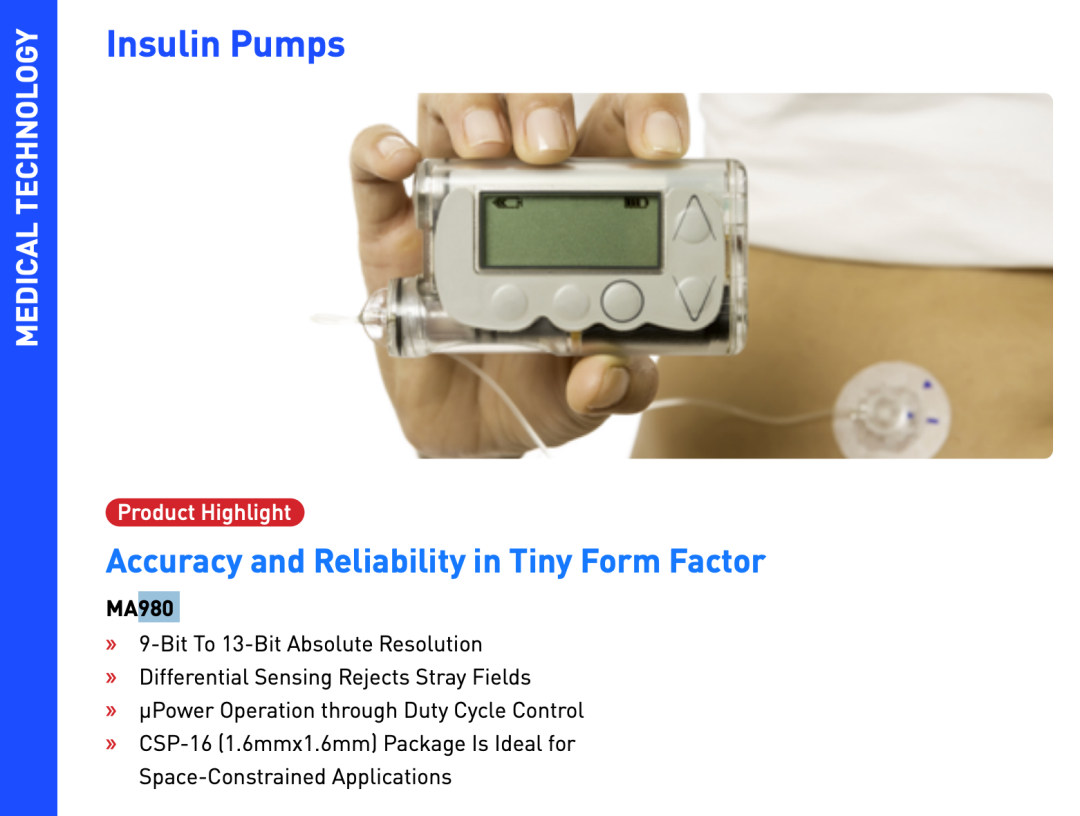
可以用在胰岛素泵上面
可以用在胰岛素泵上面
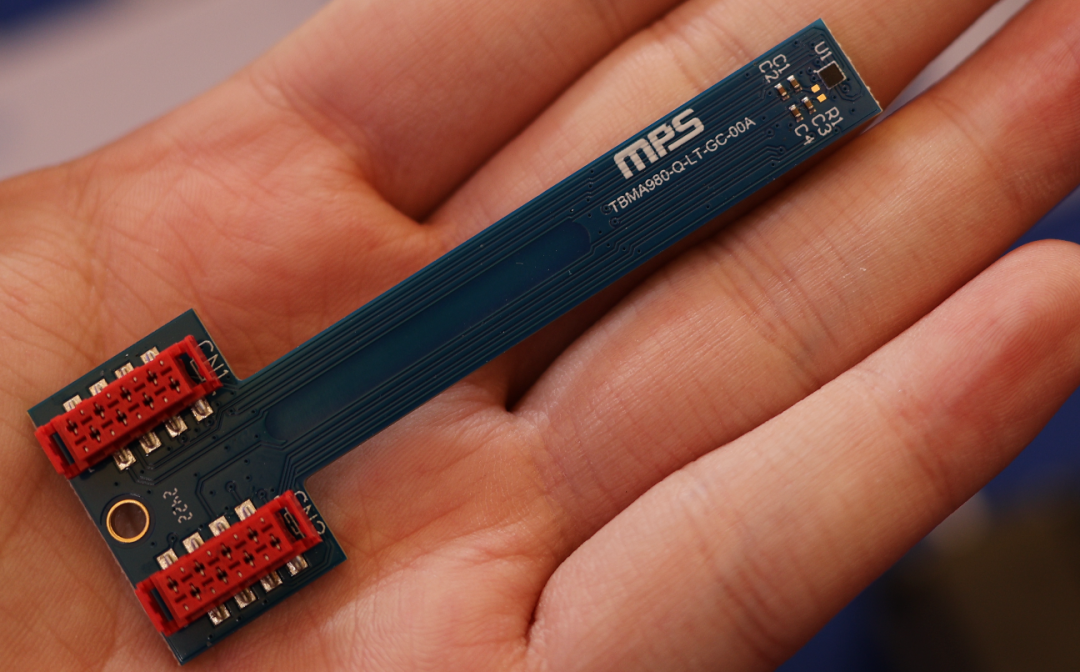
另外一个品是磁角度传感器:
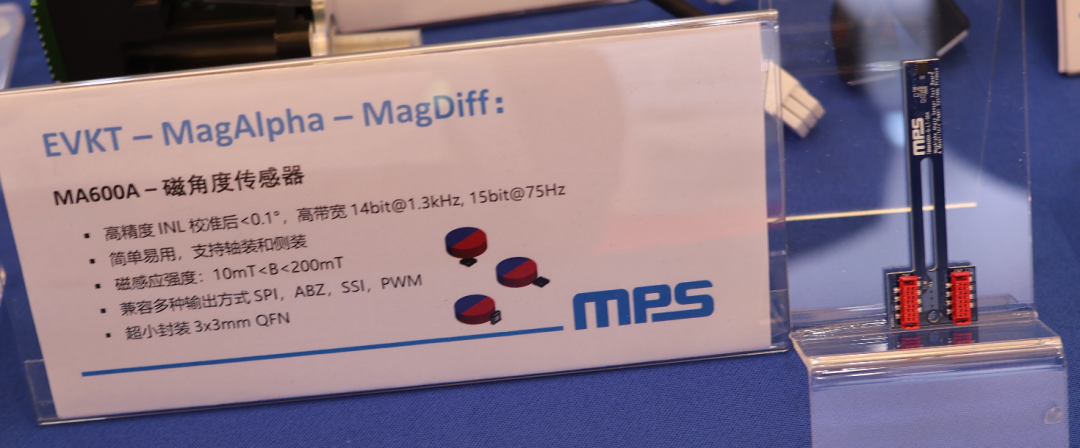
这个传感器我觉得特色是数据多样的输出,不用占用珍贵的 SPI
这个传感器我觉得特色是数据多样的输出,不用占用珍贵的 SPI
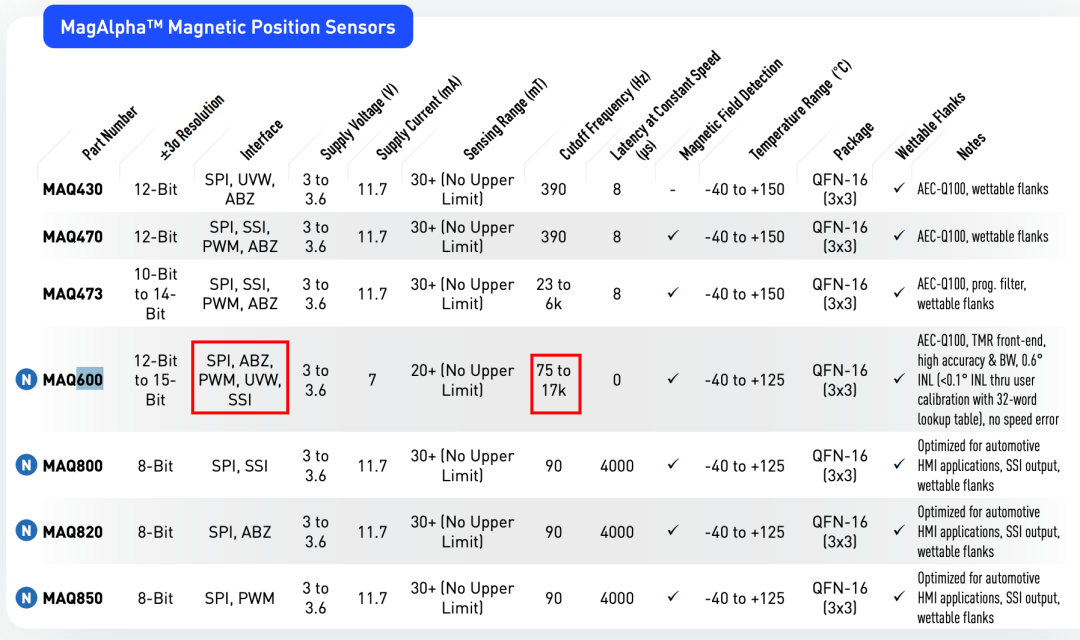
数据的上报率也是可以的
数据的上报率也是可以的
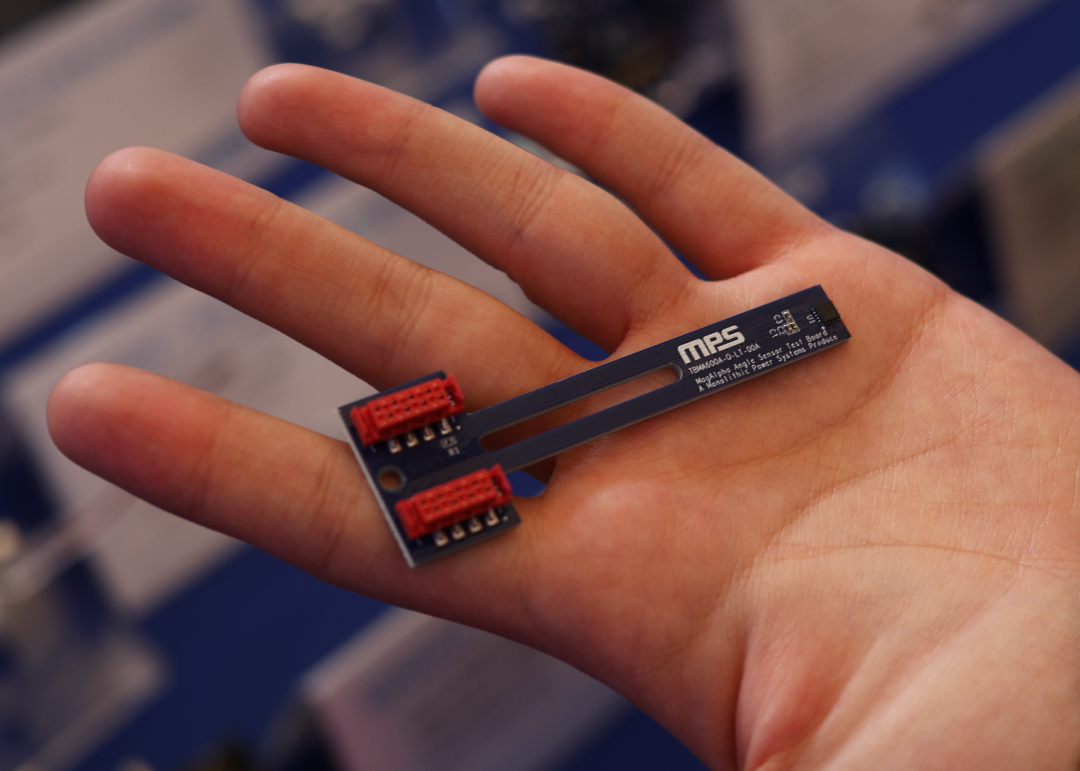
展示一下特写
展示一下特写
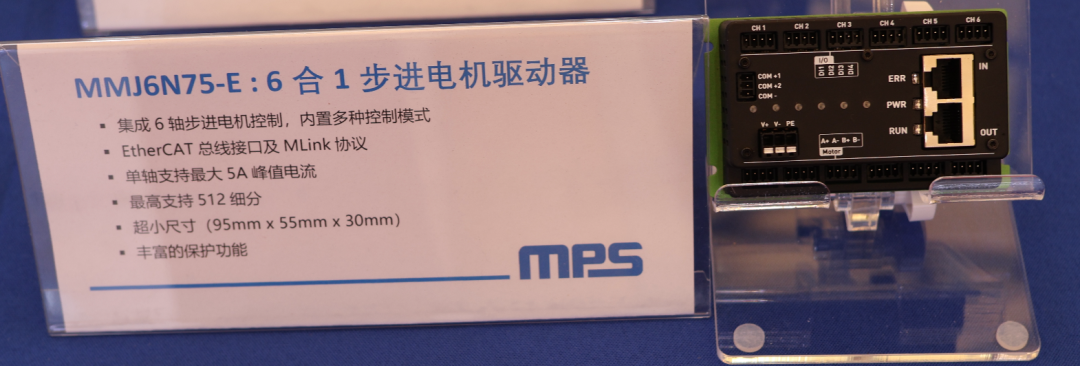
这个也比较有趣,一次可以控制 6 路电机
这个也比较有趣,一次可以控制 6 路电机
在一些要求紧凑的地方,可以发挥大用:

侧面是 microUSB 和一个急停开关吧?表面使用工程塑料,还蛮有质感的
侧面是 microUSB 和一个急停开关吧?表面使用工程塑料,还蛮有质感的
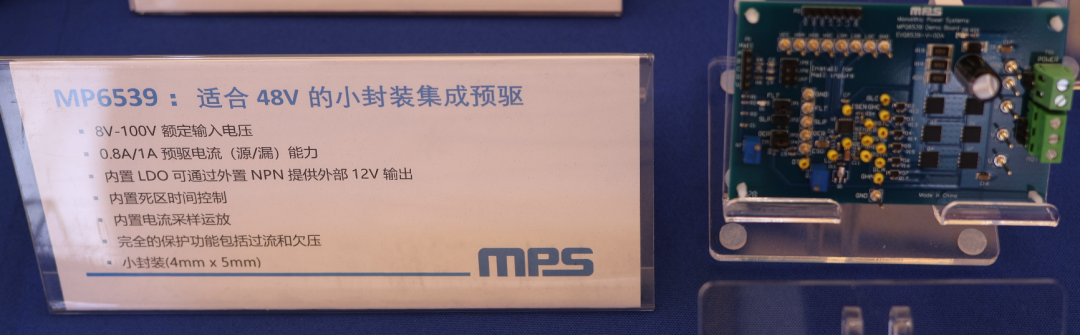
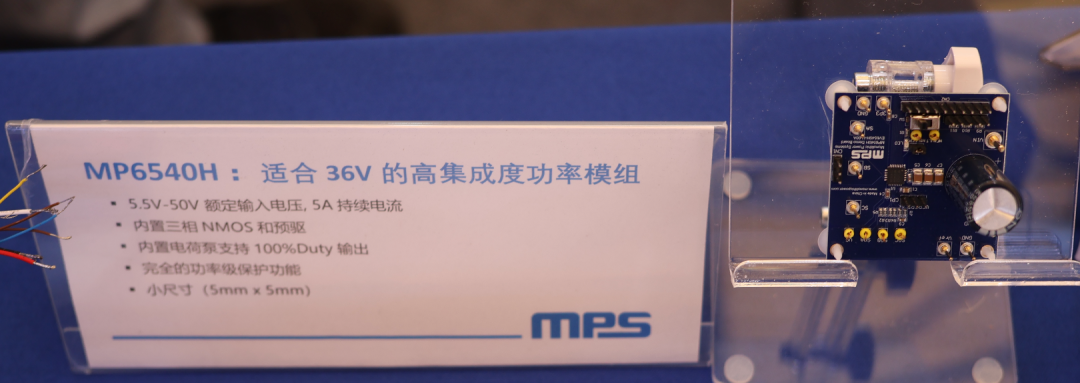
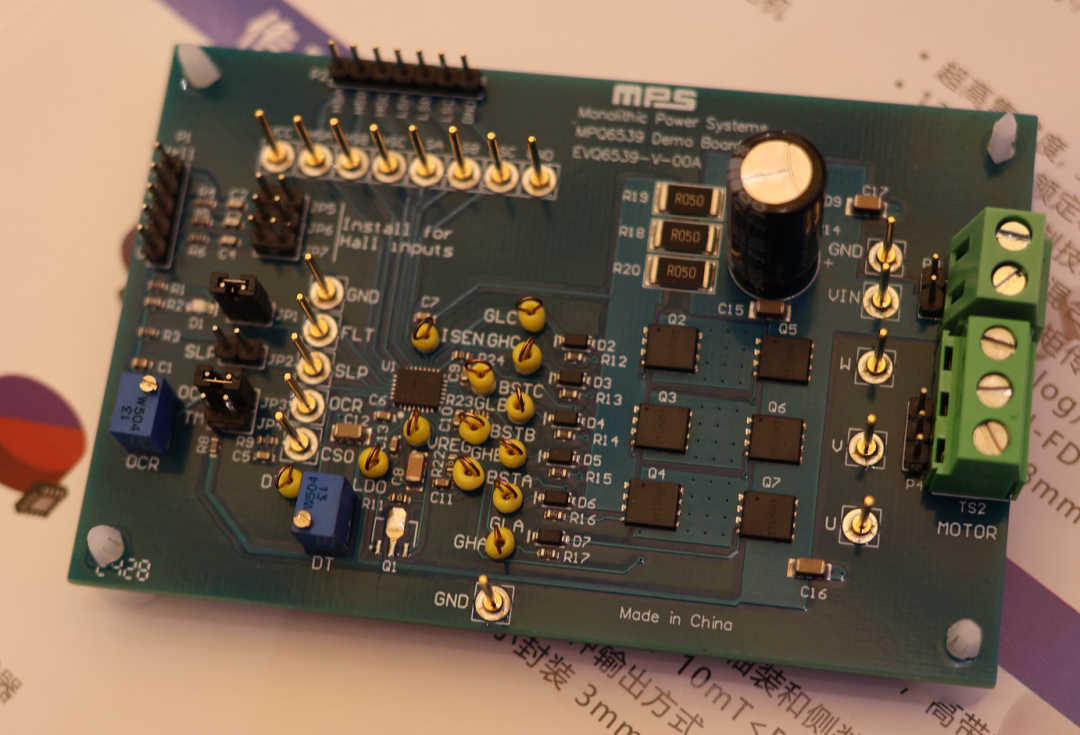
这个是一个集成的驱动器
这个是一个集成的驱动器
MP6539 是一款栅极驱动器 IC,专为三相无刷直流电机驱动应用而设计。MP6539 能够驱动三个由六个 N 沟道功率 MOSFET 组成的半桥电路,最高工作电压可达 100V。
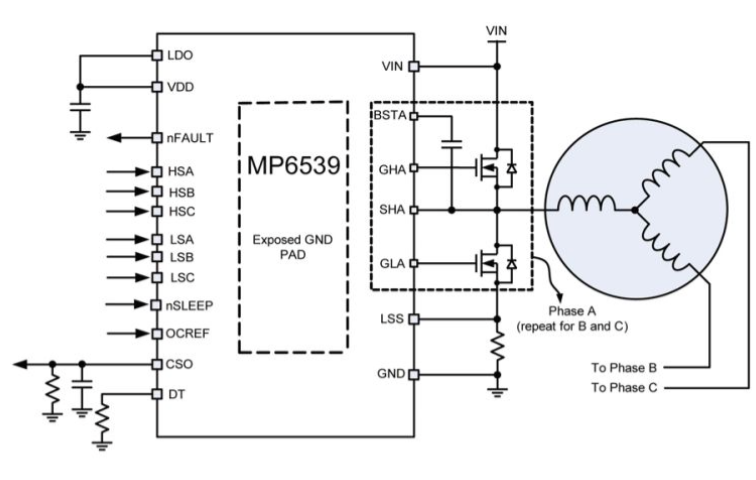
可以看到还是要有 MOS 管的
可以看到还是要有 MOS 管的
用起来很方便,不过是一个高压板
用起来很方便,不过是一个高压板
这个也是一个集成的产品,比普通的电机多了一个驱动部分
这个也是一个集成的产品,比普通的电机多了一个驱动部分
对面展台的演示 demo 上面的驱动器是在下面机柜,如果用集成方案就简洁不少:
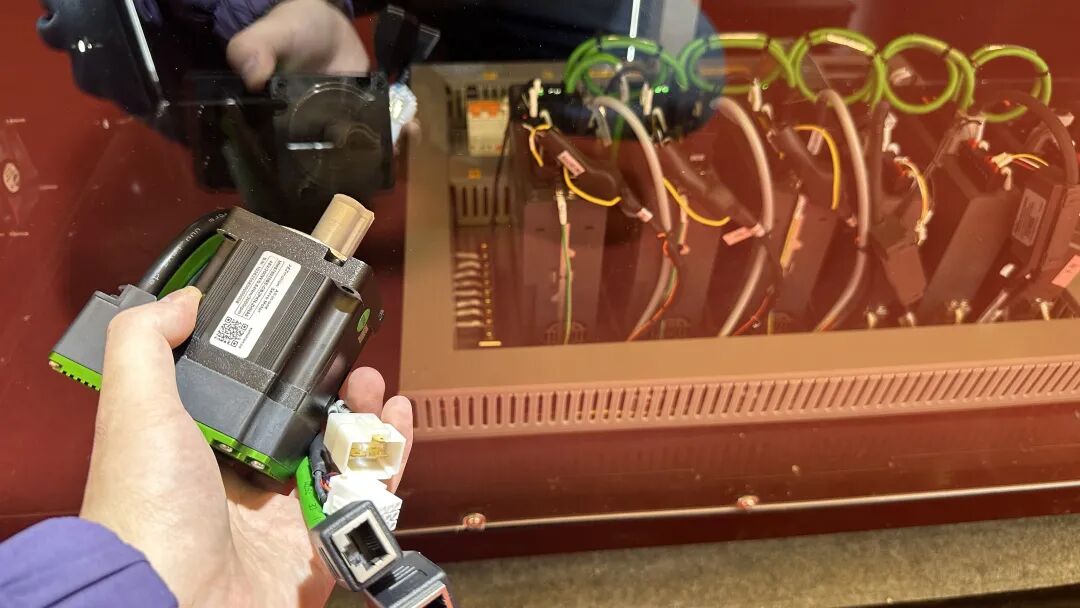
这个是对比
这个是对比
后记
MPS 以电源产品看家,但是随着时间的推移,产品线逐渐丰富,时间来到 2025,AI,具身智能,算力爆发等,无一不是对能源和控制极其渴求的行当,MPS 以自己的优势给出了一份不错的答卷:

MPS 给具身机器人的解决方案
MPS 给具身机器人的解决方案
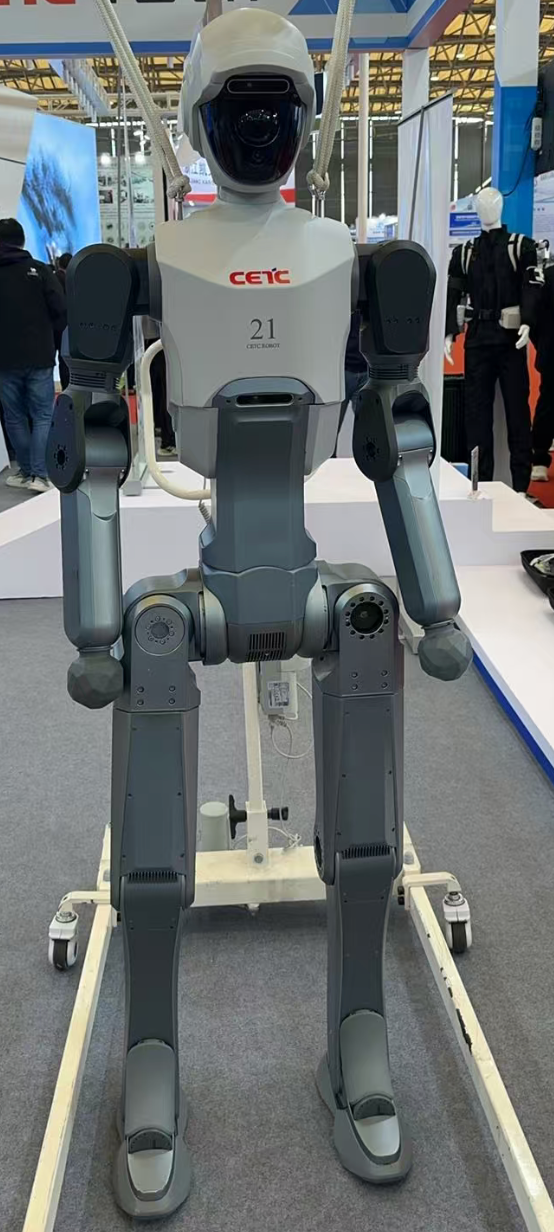
虽然看着这些机器人还是脑血栓的样子,但是我相信,过个几年还是会飞入寻常百姓家~
虽然看着这些机器人还是脑血栓的样子,但是我相信,过个几年还是会飞入寻常百姓家~
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-11-25,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号