黄仁勋提到的机器人世界,还需要AI数据来“调教” | CVPR 2024

黄仁勋提到的机器人世界,还需要AI数据来“调教” | CVPR 2024

量子位
发布于 2024-06-19 13:47:20
发布于 2024-06-19 13:47:20
允中 发自 凹非寺 量子位 | 公众号 QbitAI
本周,CVPR 2024正在美国西雅图拉开序幕。今年CVPR论文投稿数再次创下新纪录,可想而知本届会议的火热。
从研究主题来看,具身智能这一大热点值得关注。
黄仁勋在COMPUTEX大会开幕前夕的演讲中预言:AI的下一个浪潮将是物理AI。
即那些理解物理定律的AI机器人,尤其是人形机器人最有可能适应人类所构建的世界。
但随之而来的问题是,这背后需要海量的数据支持,尤其是人形机器人更为明显。因为人形机器人面临的场景多样,而且这些场景的数据采集不容易。
甚至有业界人士认为,当前具身智能最大的瓶颈就是缺乏数据。
其实不止于机器人场景,无论是构建具有强逻辑的AI模型,还是训练像GPT-4这样的大语言模型,都离不开大规模、高质量的数据集。
例如,GPT-4的模型训练就动用了大约13万亿个tokens的数据集,这无疑是一个天文数字。
在这样的数据需求下,我们自然会思考:
如此庞大的训练数据究竟从何而来?
AI行业数据的瓶颈,何解?
基于庞大数据和超高算力的“暴力美学”,是当前生成式人工智能的核心打法,也是以OpenAI为代表的一众企业的发展关键。
简单来说,在同等条件下,喂的数据越多,人工智能就越强。
海量、优质的数据争夺已经成为国家和企业间的无声战场。基于数字技术形成的通用数据、优质数据垄断,可能将成为这场数字拓荒当中,后发者无法逾越的天堑。在一定程度上可以说,掌握数据,就掌握了包括人工智能等众多未来产业的主导权。
但是从真实世界获取数据是一件困难重重的事。
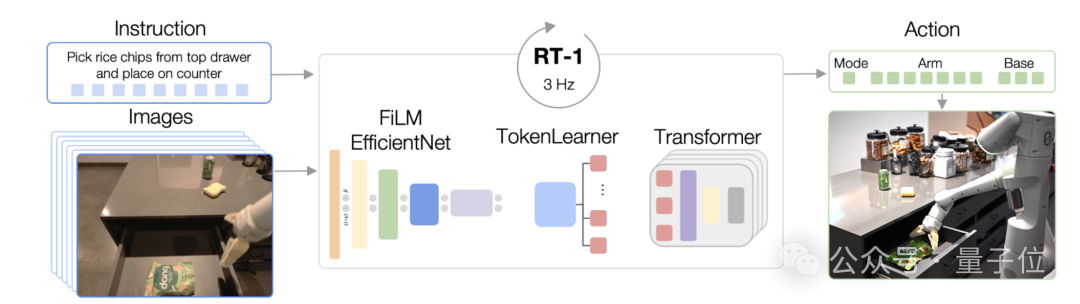
Google在RT-1项目中的经历就是一个例证,在雄厚的资金和科研资源支持下,Google团队历时17个月,仅收集到13万条覆盖700多个任务的机器人数据,这些数据的泛化能力远未达到预期。
由此可见,获取真实数据难度大、耗时长、成本高,同时还存在现实世界数据采集在隐私合规和数据安全方面的挑战,难以满足人工智能大模型训练的需求,当前,“百模大战”如火如荼,头部企业竞相投身人工智能赛道,但有效数据不足,特别是高质量数据短缺,部分领域封闭式的数据生态给人工智能发展带来了掣肘。如何解决“数据瓶颈”是未来一段时期我们即将面临——或已经面临的挑战。
如何应对挑战,目前一家利用计算机技术生成数据的服务商非常值得关注,它是群核科技(酷家乐)创新实验室Koolab孵化出的Coohom Cloud。
群核科技是国内最大的空间设计软件平台,Coohom Cloud利用其庞大的室内数据资源,结合高性能的渲染引擎和先进的数据处理技术,为AI行业“投喂”逼真且物理真实的2D、3D室内数据集等产品和服务。
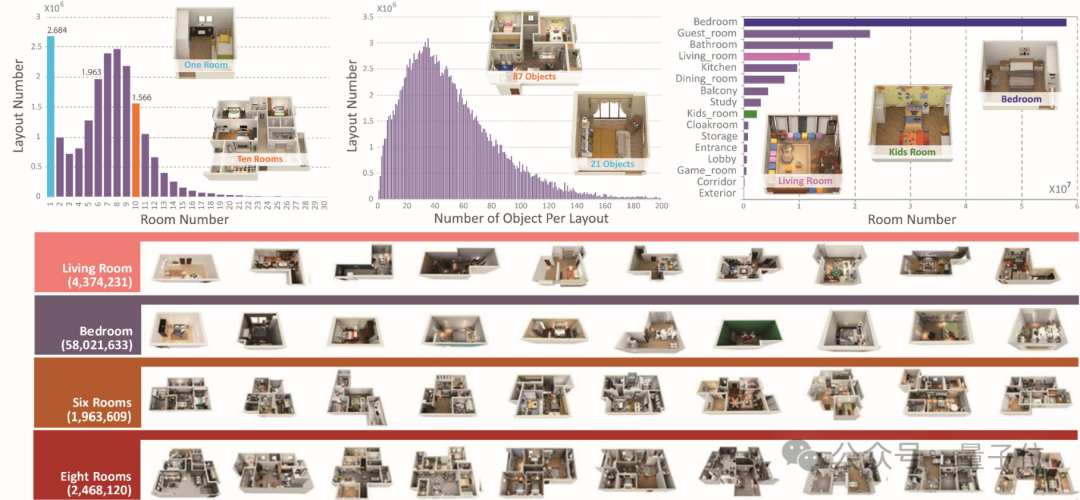
群核科技平台每天会生成40万+3D设计方案,并沉淀了约3.6亿个3D模型数据,涵盖家具、电器、生活用品等,在此基础上,群核科技与包括英国帝国理工大学、美国南加州大学浙江大学等高校联手推出了多种数据集,为室内环境理解,3D重构,机器人交互等研究提供的强大数据基础。
在2D图片渲染技术上,Coohom Cloud利用自研渲染引擎,在多样化的室内场景中,通过调整相机参数、行径轨迹、灯光条件等设置进行图片数据的采集,最终生成RGB、深度、语义、法向、点云等格式的2D数据集。这样的数据输出能力,使得Coohom Cloud每天能够产出30万组2D数据集,为AI智能体的导航、视觉感知、环境理解等能力提供了充足的训练素材。
群核科技怎么解?低成本+高质量
成本更低是数据获取必须要的优点,包括获取成本和经济成本,不少企业都在大量烧钱试图通过海量数据来满足AI模型训练需求,高额的投入和预期的不确定性,让资金的持续投入陷入困境。
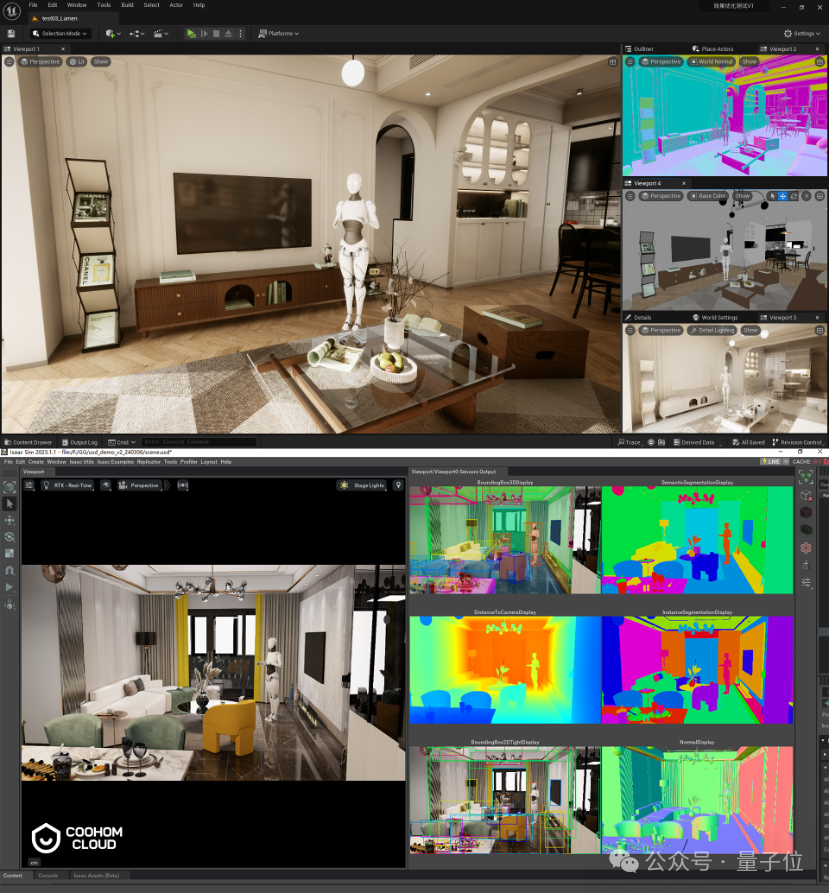
为了提供更高性价比的数据服务方案,Coohom Cloud通过自研数据引擎,这是一套专为挖掘数据转化而设计的高效工具,可以高效的将设计平台沉淀数据库转化为AI训练的燃料。它不仅能够定制化输出针对不同行业所需要的数据集,还能实现室内场景的数字化生成,与NVIDIA Isaac Sim、Unreal Engine、Blender等专业仿真器和渲染引擎无缝对接。
所有流程全部利用计算机技术实现,用户对于数据的使用会更加便捷和直观,无需再耗费大量人力物力去采集获取数据,从而可以将更多的重心放在模型调优上。
当然,数据想要投入商用,除了数据量、成本优势以外,更需要保证的是高质量,这将决定数据产业的未来发展面有多大。
在这一点上,Coohom Cloud是怎么考虑的呢?
1、物理性质增强
在人形机器人的发展道路上,环境交互能力是其智能化的关键。比如自如开关门、精准取放物体、甚至叠放衣物等。
以NVIDIA Isaac Sim仿真平台项目为例,通过创建一个包含物理属性的逼真3D环境,让机器人能够在虚拟世界中学习如何与物体互动、预测物理事件,甚至在虚拟世界中进行探索和导航。在这样的虚拟环境中,机器人可以进行无数次的交互测试,无需担心物理损伤或环境限制,从而大幅降低了训练成本,同时提高了训练的安全性和可重复性。
Coohom Cloud正是基于这样的理念,利用Isaac Sim,Unreal Engine等为代表的的仿真平台,为机器人训练提供了定制化的场景和交互模型。这些数据不仅在视觉上逼真,更重要的是,它们具备真实的物理属性——铰链、滑轨等组件可以进行旋转和平移,同时模型还拥有真实的密度、摩擦力和弹性等物理状态信息。这使得机器人能够在物理真实的虚拟环境下,以极低的成本获取大量的训练数据,测试并优化其性能。

2、场景环境增强
在AI的世界里,光线就像是那个决定成败的细节,特别是在视觉感知任务中,光线条件对AI的识别和分析能力起着至关重要的作用。
拿上文提到的InteriorNet来说,这一大规模多传感器真实感室内场景数据集,通过提供不同光照环境下的高真实感渲染图像,展示了环境增强与多样化在提升AI性能方面的重要性。服务类机器人在面对室内外光线变化时,可能会遇到识别障碍,因此,拥有一个涵盖广泛光照条件的数据集对于训练AI以适应各种环境至关重要。
Coohom Cloud为虚拟室内场景中的每个灯源设定详细参数,实现个性化的灯光环境控制,让机器人在不同的光照环境下都能“看”得清清楚楚,学得明明白白。
除了光照条件的多样性,Coohom Cloud还通过Domain Randomization技术,进一步增强了场景环境的复杂性,就像是给机器人的训练场来了一场“大变身”。这项功能能够根据不同的训练需求,灵活切换模型的表面材质,比如将大理石地面替换为木质地板,调整不同反射效果,从而在虚拟环境中模拟出真实世界的多样性和复杂性。让机器人的训练更加贴近现实,增强了它的适应性和泛化能力。

3、高效标注系统
AI领域中的数据标注是模型性能的关键因素,但传统的人工标注方式劳动密集且耗时。
Coohom Cloud利用先进的合成数据生成技术,可以根据研究者需求定制化分割和标注数据。例如,处理卧室场景的3D模型时,系统能细分为床、枕头、毛毯等基础要素,并生成精准语义标签,提高数据准确性并满足需求,从而提升模型认知精度。这种方式不仅减少了人工标注工作量,也使研究者能更专注于模型创新和优化,提高数据处理效率,为AI技术发展注入新活力。

此外,在隐私、安全法规等问题上,Coohom Cloud采取的合成数据安全策略亦可以避免接触任何真实用户数据,安全审核机制用于检查数据是否合规,并针对交付使用的数据进行相关授权管理,从而确保数据的安全使用。在生态链上,Coohom Cloud也串联了优秀的设计者和研究者,针对AI需求,开发更高效的工具来促进设计生态向AI前沿融合。
产业级应用时刻,正在到来
不论是诸多机构的预测数据,还是资本机构的”投注“,亦或是产业侧的实际应用,都可以看出数据服务已经从科研场景逐步走向市场化。也有越来越多玩家选择加入。
不过在人工智能领域,数据的质量和应用的实际效果比盲目堆砌更为关键。那么,Coohom Cloud的海量室内数据集是如何落地到不同的行业场景中的呢?
2022年底,群核科技KooLab与英特尔实验室、西班牙计算机视觉中心以及慕尼黑工业大学共同打磨的SPEAR智能仿真平台,面向开发者全面开放,帮助开发人员加快对不同智能机器人的训练和验证。
在整个项目中,Coohom Cloud团队提供超300个场景、超17000个模型,为仿真器的研究提供了数据上的神助攻,让研究者能便捷的在虚拟环境中测试机器人性能。
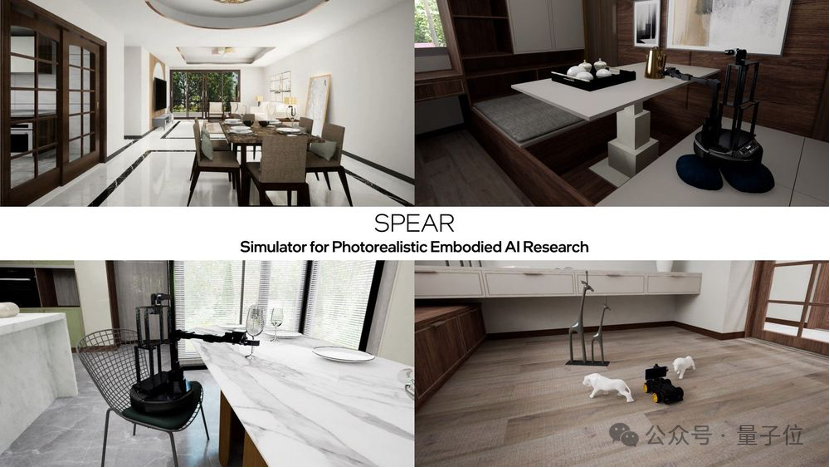
英特尔首席科学家Mike Roberts赞叹Coohom Cloud的高质量数据:
不仅加速了具身智能研究,还为仿真器项目的落地提供了全方位的数据保障。
再以清洁机器人产品为例,在室内为主的业务场景下,积累边缘场景数据需要大量时间,这会直接影响到C端用户的产品体验,因此解决机器人场景边缘场景问题成了产品提高竞争力的关键。
清洁机器人的边缘场景主要包含一些难以收集的宠物粪便,果壳碎屑等障碍物,特殊狭窄的过道、高反光的地板玻璃以及强暗光环境下的数据等,以前为了采集数据,厂家得组建个数十人团队,耗时数月,还得外包给第三方,整个过程繁琐又烧钱,数据质量还不一定达标。
Coohom Cloud的方案,让企业从模型素材到语义标注,再到数据结构处理全流程把控,为用户关注的边缘场景,专门打造特殊的室内虚拟环境,并通过调整光照参数,实现场景多样性衍生,在45个工作日即生成了数万组高质量的3D模型数据集和百万组精细化图片数据,数据交付即可用,帮助企业大幅减少数据侧投入,提高AI项目进度。
当AI大模型和人形机器人成为科技界的热议话题,数据已然成为了这个时代的核心资产。Coohom Cloud正以其强大的数据生成技术,为AI的多样化应用需求提供支撑,推动行业向更广泛的智能化发展迈进。
One More Thing
我们期待着Coohom Cloud在未来能够持续深化其技术,不断探索新的领域。
而就在6月17日至6月21日,Coohom Cloud团队将在西雅图举办的2024年CVPR会议上,展位号1637,展示他们的最新成果。如果你对数据服务充满兴趣,不如亲临现场与Coohom Cloud团队深入交流,共同见证AI数据服务的未来。
*本文系量子位获授权刊载,观点仅为作者所有。
— 完 —
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2024-06-18,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号