AimRT入门教程


摘要
本人的系统是Ubuntu 22.04,在此基础上对AimRT进行源码编译。AimRT 编译所需的最小 CMake 版本为 3.24,Ubuntu 22.04 使用 apt 包管理器安装的 CMake 版本为 3.22 不符合要求,可以使用命令行 cmake --version,查看当前版本,比如我的版本为:cmake version 4.0.1。
下载源码:
git clone https://github.com/AimRT/AimRT.git 参考AimRT源码中的 src 目录,AimRT 框架中包含的内容如下:
src
├── common --------------------------------- // 一些基础的、可以直接使用的通用组件,例如 string、log 接口、buffer 等
├── examples ------------------------------- // AimRT 官方示例
│ ├── cpp -------------------------------- // CPP 接口的示例
│ ├── py --------------------------------- // Python 接口的示例
│ └── plugins ---------------------------- // 插件的使用示例
├── interface ------------------------------ // AimRT 接口层
│ ├── aimrt_core_plugin_interface -------- // [CPP] 插件开发接口
│ ├── aimrt_module_c_interface ----------- // [C] 模块开发接口
│ ├── aimrt_module_cpp_interface --------- // [CPP] 模块开发接口,对 C 版本的封装
│ ├── aimrt_module_protobuf_interface ---- // [CPP] 与 protobuf 相关的模块开发接口,基于 CPP 版本接口
│ ├── aimrt_module_ros2_interface -------- // [CPP] 与 ROS2 相关的模块开发接口,基于 CPP 版本接口
│ ├── aimrt_pkg_c_interface -------------- // [C] Pkg 开发接口
│ └── aimrt_type_support_pkg_c_interface - // [C] Type support 包接口
├── plugins -------------------------------- // AimRT 官方插件
├── protocols ------------------------------ // AimRT 官方标准协议
├── runtime -------------------------------- // AimRT 运行时
│ ├── core ------------------------------- // 运行时核心库
│ ├── main ------------------------------- // 基于 core 实现的一个主进程"aimrt_main"
│ └── python_runtime --------------------- // 基于 pybind11 封装的 python 版本运行时
└── tools ---------------------------------- // 一些配套工具AimRt中的概念
1.AimRT 拥有一个用于标识独立逻辑单元的概念:Module。Module是一个逻辑层面的概念,代表一个逻辑上内聚的块。Module之间可以在逻辑层通过Channel和RPC两种抽象的接口通信。可以通过实现几个简单的接口来创建一个Module。一个Module通常对应一个硬件抽象、或者是一个独立算法、一项业务功能。Module可以使用框架提供的句柄来调用各项运行时功能,例如配置、日志、执行器等。框架给每个Module提供的句柄也是独立的,来实现一些资源统计、管理方面的功能。
2.Node代表一个可以部署启动的进程,在其中运行了一个 AimRT 框架的 Runtime 实例。Node是一个部署、运行层面的概念,一个Node中可能存在多个Module。Node在启动时可以通过配置文件来设置日志、插件、执行器等运行参数。
3. Pkg是 AimRT 框架运行Module的一种途径。Pkg代表一个包含了单个或多个Module的动态库,Node在运行时可以加载一个或多个Pkg。可以通过实现几个简单的模块描述接口来创建Pkg。Module的概念更侧重于代码逻辑层面,而Pkg则是一个部署层面的概念,其中不包含业务逻辑代码。一般来说,在可以兼容的情况下,推荐将多个Module编译在一个Pkg中,这种情况下使用 RPC、Channel 等功能时性能会有优化。通常Pkg中的符号都是默认隐藏的,只暴露有限的纯 C 接口,不同Pkg之间不会有符号上的相互干扰。不同Pkg理论上可以使用不同版本的编译器独立编译,不同Pkg里的Module也可以使用相互冲突的第三方依赖,最终编译出的Pkg可以二进制发布。
4. AimRT 中的 “Protocol” ,Protocol意为协议,代表Module之间通信的数据格式,用来描述数据的字段信息以及序列化、反序列化方式,例如Channel的订阅者和发布者之间制定的数据格式、或者RPC客户端和服务端之间制定的请求包/回包的数据格式。通常由一种IDL( Interface description language )描述,然后由某种工具转换为各个语言的代码。AimRT 目前官方支持两种 IDL:
- Protobuf
- ROS2 msg/srv
但AimRT 并不限定协议与IDL的具体类型,使用者可以实现其他的 IDL,例如 Thrift IDL、FlatBuffers 等,甚至支持一些自定义的 IDL。
5. AimRT 中的 “Channel” 概念,Channel也叫数据通道,是一种典型的通信拓扑概念,其通过Topic标识单个数据通道,由发布者Publisher和订阅者Subscriber组成,订阅者可以获取到发布者发布的数据。Channel是一种多对多的拓补结构,Module可以向任意数量的Topic发布数据,同时可以订阅任意数量的Topic。类似的概念如 ROS 中的 Topic、Kafka/RabbitMQ 等消息队列。在 AimRT 中,Channel 由接口层和后端两部分组成,两者相互解耦。接口层定义了一层抽象的 Api,表示逻辑层面上的Channel;而后端负责实际的 Channel 数据传输,可以有多种类型。AimRT 官方提供了一些 Channel 后端,例如 mqtt、ros2 等,使用者也可以自行开发新的 Channel 后端。开发者在使用 AimRT 中的 Channel 功能时,先在业务逻辑层调用接口层的 API,往某个 Topic 中发布数据,或订阅某个 Topic 的数据。然后 AimRT 框架会根据一定的规则,选择一个或几个 Channel 后端进行处理,这些后端将数据通过一些特定的方式发送给其他节点,由其他节点上对应的 Channel 后端接收数据并传递给业务逻辑层。整个逻辑流程如下图所示:
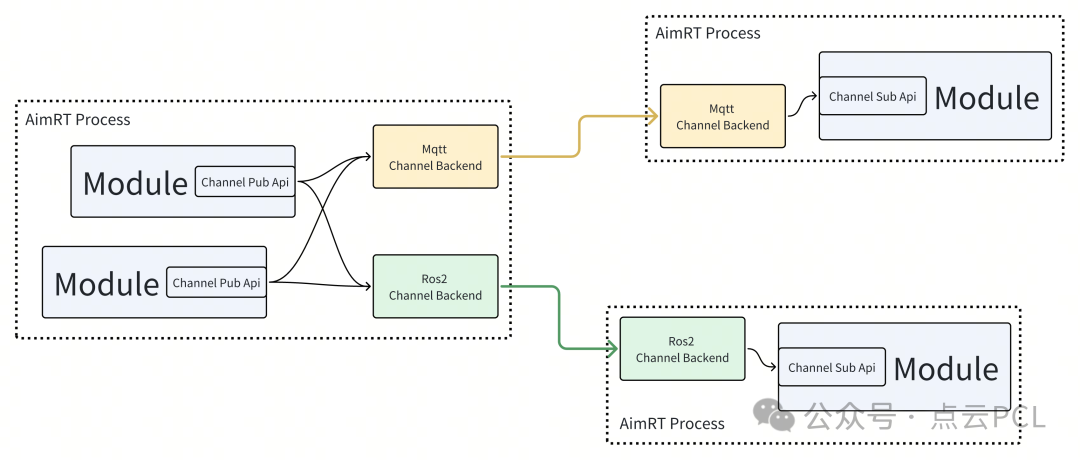
图片来自网络
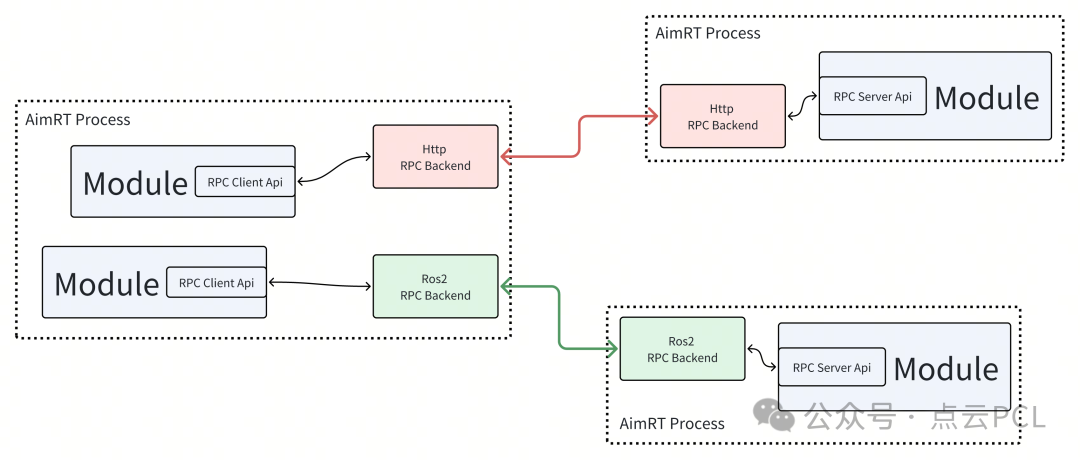
6. AimRT 中的 “Rpc” 概念,RPC也叫远程过程调用,基于请求-回复模型,由客户端Client和服务端Server组成,Module可以创建客户端句柄,发起特定的 RPC 请求,由其指定的、或由框架根据一定规则指定的服务端来接收请求并回复。Module也可以创建服务端句柄,提供特定的 RPC 服务,接收处理系统路由过来的请求并回复。类似的概念如 ROS 中的 Services、GRPC/Thrift 等 RPC 框架。在 AimRT 中,RPC 也由接口层和后端两部分组成,两者相互解耦。接口层定义了 RPC 的抽象 Api,而后端则负责实际的 RPC 调用。AimRT 官方提供了一些 RPC 后端,例如 http、ros2 等,使用者也可以自行开发新的 RPC 后端。开发者使用 AimRT 的 RPC 功能时,先在业务逻辑层调用接口层 API,通过 Client 发起一个 RPC 调用,AimRT 框架会根据一定的规则选择一个 RPC 后端进行处理,它将数据通过一些特定的方式发送给 Server 节点,由 Server 节点上对应的 Rpc 后端接收数据并传递给业务层,并将业务层的回包传递回 Client 端。整个逻辑流程如下图所示:
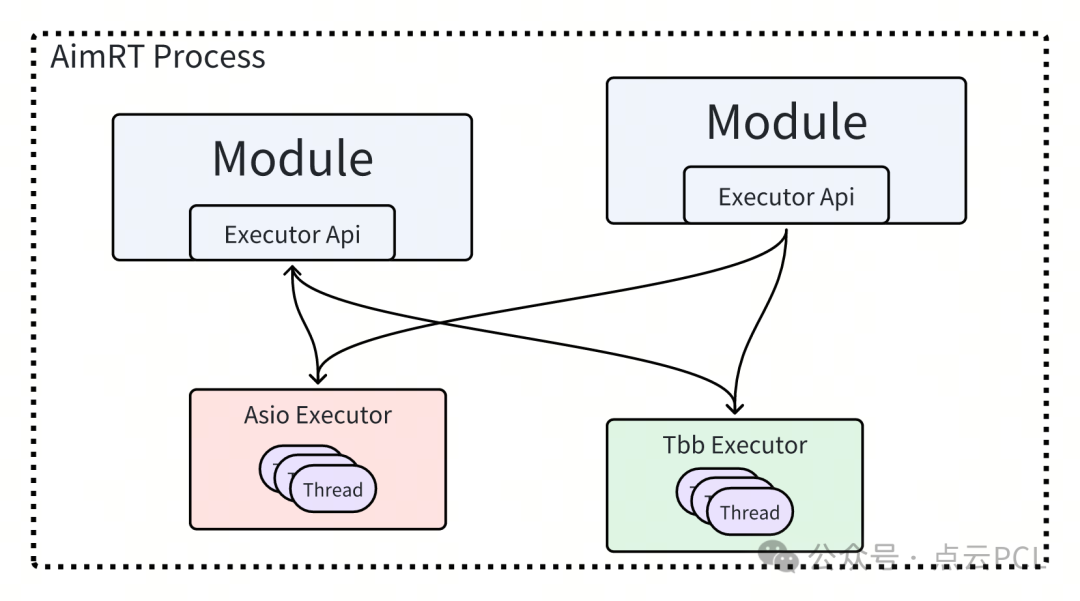
7. AimRT 中的 “Executor” 概念,Executor,或者叫执行器,是指一个可以运行任务的抽象概念,一个执行器可以是一个 Fiber、Thread 或者 Thread Pool,我们平常写的代码也是默认的直接指定了一个执行器:Main 线程。一般来说,能提供以下接口的就可以算是一个执行器:
void Execute(std::function<void()>&& task);还有一种Executor提供定时执行的功能,可以指定在某个时间点或某段时间之后再执行任务。其接口类似如下:
void ExecuteAt(std::chrono::system_clock::time_point tp, std::function<void()>&& task);
void ExecuteAfter(std::chrono::nanoseconds dt, std::function<void()>&& task);在 AimRT 中,执行器功能由接口层和实际执行器的实现两部分组成,两者相互解耦。接口层定义了执行器的抽象 Api,提供投递任务的接口。而实现层则负责实际的任务执行,根据实现类型的不同有不一样的表现。AimRT 官方提供了几种执行器,例如基于 Asio 的线程池、基于 Tbb 的无锁线程池、基于时间轮的定时执行器等。开发者使用 AimRT 的执行器功能时,在业务层将任务打包成一个闭包,然后调用接口层的 API,将任务投递到具体的执行器内,而执行器会根据自己的调度策略,在一定时机执行投递过来的任务。具体逻辑流程如下图所示:
8. AimRT 中的 “Plugin” 概念,Plugin指插件,是指一个可以向 AimRT 框架注册各种自定义功能的动态库,可以被框架运行时加载,或在用户自定义的可执行程序中通过硬编码的方式注册到框架中。AimRT 框架暴露了大量插接点和查询接口,例如:
- 日志后端注册接口
- Channel/Rpc 后端注册接口
- Channel/Rpc 注册表查询接口
- 各组件启动 hook 点
- RPC/Channel 调用过滤器
- 模块信息查询接口
- 执行器注册接口
- 执行器查询接口
- …
使用者可以直接使用一些 AimRT 官方提供的插件,也可以从第三方开发者处寻求一些插件,或者自行实现一些插件以增强框架的服务能力,满足特定需求。
9. AimRT 中的协议,协议在 AimRT 中的主要作用是实现组件之间的数据交换和通信。无论是在同一进程内还是跨进程通信,AimRT都提供了一个统一的接口和数据序列化/反序列化机制,确保数据能够正确传输和解析。AimRT 现支持 ros2 和 protobuf 两种协议:参考 AimRT 源码中的 src/protococols 目录
src/protocols
├── pb
│ ├── actuator
│ ├── common
│ ├── example
│ ├── geometry
│ └── sensor
├── plugins
│ ├── log_control_plugin
│ ├── parameter_plugin
│ ├── record_playback_plugin
│ ├── ros2_plugin_proto
│ ├── time_manipulator_plugin
│ └── topic_logger_plugin
└── ros2
├── aimrt_msgs
├── example_ros2
└── ros2_msgsAimRT 接口概述
AimRT 为多种开发、应用场景提供了界面,总体来说包括以下方面:
- - 模块逻辑开发接口:用于开发具体的业务模块,包含 C、CPP、Python 接口,其中 CPP 接口是基于 C 接口封装的,Python 接口是基于 CPP 接口封装的;
- - 实例部署运行接口:主要用于 APP 模式下部署运行,包含 CPP、Python 接口,其中Python 接口是基于 CPP 接口封装的;
- - 实例运行配置:AimRT 运行时配置,Yaml 形式;
- - 插件开发接口:用于开发 AimRT 插件,仅提供 CPP 接口;
在 AimRT 中,一个重要是思想是将逻辑实现与实际部署运行分离。用户在开发业务逻辑时不需要关心最后部署运行的方式,在最终部署运行时发生的一些变化也不需要修改业务逻辑代码。
AimRT 框架在运行时依次有三大阶段:Initialize、Start、Shutdown。这三个阶段的意义以及对应阶段做的事情如下:
- Initialize阶段:
- - 初始化 AimRT 框架;
- - 初步初始化业务,申请好业务所需的 AimRT 框架中的资源;
- - 在主线程中依次完成所有的初始化,不会开业务线程,所有代码是线程安全的;
- - 部分接口或资源不能在此阶段使用,只能等到Start阶段使用;
- Start阶段:
- - 完全初始化业务;
- - 启动业务相关逻辑;
- - 可以开始使用 AimRT 中的所有资源,如发起 RPC、将任务投递到线程池等;
- - 在主线程中依次启动各个业务,业务可以再调度到多线程环境中;
- - 部分接口只能在Initialize阶段调用,不能在此阶段调用;
- Shutdown阶段:
- - 通常由 ctrl-c 等信号触发;
- - 优雅停止业务;
- - 优雅停止 AimRT 框架;
- - 在主线程中阻塞的等待所有业务逻辑结束;
- - 大部分接口在此阶段都无法继续使用;
简而言之,一些申请 AimRT 资源的操作,只能在 Initialize 阶段去做,以此来保证在业务运行期间AimRT框架不会有新的资源申请或者锁操作,保证 Start 阶段的效率和稳定性。
AimRT 框架集成业务逻辑的两种方式
AimRT 框架可以通过两种方式来集成业务逻辑,分别是 App模式 和 Pkg模式,实际采用哪种方式需要根据具体场景进行判断。两者的区别如下:
1. App模式:在开发者自己的 Main 函数中直接链接 AimRT 运行时库,编译时直接将业务逻辑代码编译进主程序:
- - 优势:没有 dlopen 这个步骤,没有 so,只会有最终一个 exe。
- - 劣势:可能会有第三方库的冲突;无法独立的发布Module,想要二进制发布只能直接发布 exe。
- - 使用场景:一般用于小工具、小型 Demo 场景,没有太大的模块解耦需求;
2. Pkg模式:使用 AimRT 提供的 aimrt_main 可执行程序,在运行时根据配置文件加载动态库形式的Pkg,导入其中的Module类:
- - 优势:编译业务Module时只需要链接非常轻量的 AimRT 接口层,不需要链接 AimRT 运行时库,减少潜在的依赖冲突问题;可以二进制发布 so;独立性较好。
- - 劣势:框架基于 dlopen 加载Pkg,极少数场景下会有一些兼容性问题。
- - 使用场景:一般用于中大型项目,对模块解耦、二进制发布等有较强烈需求时;
无论采用哪种方式都不影响业务逻辑,且两种方式可以共存,实际采用哪种方式需要根据具体场景进行判断。注意,上述说的两种方式只是针对 Cpp 开发接口。如果是使用 Python 开发,则只支持App模式。
源码编译
在源码下有build.sh文件用来我门直接编译。首先我们看一下这个cmake选项有哪些:
cmake -B build \ # 指定构建目录为 build,生成的构建文件会放在该目录下
-DCMAKE_BUILD_TYPE=Release \ # 设置构建类型为 Release(优化编译,去掉调试信息)
-DAIMRT_INSTALL=ON \ # 启用安装功能,允许执行 `make install`
-DCMAKE_INSTALL_PREFIX=./build/install \ # 指定安装目录为 ./build/install
-DAIMRT_BUILD_TESTS=OFF \ # 不编译测试代码
-DAIMRT_BUILD_EXAMPLES=ON \ # 编译示例程序
-DAIMRT_BUILD_DOCUMENT=ON \ # 构建文档
-DAIMRT_BUILD_PROTOCOLS=ON \ # 构建通信协议相关模块
-DAIMRT_BUILD_RUNTIME=ON \ # 构建运行时相关组件
-DAIMRT_BUILD_CLI_TOOLS=ON \ # 构建命令行工具
-DAIMRT_BUILD_PYTHON_RUNTIME=ON \ # 构建 Python 运行时支持
-DAIMRT_USE_FMT_LIB=ON \ # 启用 fmt 格式化库(用于字符串格式化)
-DAIMRT_BUILD_WITH_PROTOBUF=ON \ # 启用 protobuf 支持,用于序列化通信协议
-DAIMRT_USE_LOCAL_PROTOC_COMPILER=OFF \ # 不使用本地 protoc 编译器,可能使用系统默认或下载的版本
-DAIMRT_USE_PROTOC_PYTHON_PLUGIN=OFF \ # 不使用 Python 的 protobuf 插件
-DAIMRT_BUILD_WITH_ROS2=ON \ # 启用 ROS2 支持,集成 ROS2 功能
-DAIMRT_BUILD_NET_PLUGIN=ON \ # 构建网络通信插件
-DAIMRT_BUILD_MQTT_PLUGIN=ON \ # 构建 MQTT 通信插件
-DAIMRT_BUILD_ZENOH_PLUGIN=ON \ # 构建 Zenoh 通信插件
-DAIMRT_BUILD_ICEORYX_PLUGIN=ON \ # 构建 Iceoryx 插件(用于高性能进程间通信)
-DAIMRT_BUILD_ROS2_PLUGIN=ON \ # 构建 ROS2 插件
-DAIMRT_BUILD_RECORD_PLAYBACK_PLUGIN=ON \ # 构建数据记录与回放插件
-DAIMRT_BUILD_TIME_MANIPULATOR_PLUGIN=ON \ # 构建时间控制插件(如时间加速、回放等)
-DAIMRT_BUILD_PARAMETER_PLUGIN=ON \ # 构建参数管理插件
-DAIMRT_BUILD_LOG_CONTROL_PLUGIN=ON \ # 构建日志控制插件
-DAIMRT_BUILD_TOPIC_LOGGER_PLUGIN=ON \ # 构建主题日志记录插件(记录通信消息)
-DAIMRT_BUILD_OPENTELEMETRY_PLUGIN=ON \ # 构建 OpenTelemetry 插件,用于分布式追踪和监控
-DAIMRT_BUILD_GRPC_PLUGIN=ON \ # 构建 gRPC 插件,用于远程过程调用
-DAIMRT_BUILD_ECHO_PLUGIN=ON \ # 构建 echo 插件(用于消息回显调试)
-DAIMRT_BUILD_PROXY_PLUGIN=ON \ # 构建代理插件(用于通信代理、转发等)
-DAIMRT_BUILD_PYTHON_PACKAGE=ON \ # 构建 Python 包(便于通过 pip 安装或使用)
-DCMAKE_POLICY_VERSION_MINIMUM=3.5 \此时我们可以直接运行编译脚本
./build.sh
编译完成之后可以看见aimrt依赖的第三方库都存放在_deps文件夹下
运行一个HelloWorld
一个最基本的 cpp helloworld 示例,演示内容包括:
- - 如何继承 ModuleBase 创建一个模块;
- - 如何以 Pkg 模式启动;
- - 如何使用 Configurator 功能;
- - 如何使用 Log 功能;
核心代码:
- [helloworld_module.cc]
#include "helloworld_module/helloworld_module.h"
#include "yaml-cpp/yaml.h"
namespace aimrt::examples::cpp::helloworld::helloworld_module {
bool HelloWorldModule::Initialize(aimrt::CoreRef core) {
// Save aimrt framework handle
core_ = core;
// Read cfg
auto file_path = core_.GetConfigurator().GetConfigFilePath();
if (!file_path.empty()) {
YAML::Node cfg_node = YAML::LoadFile(std::string(file_path));
for (const auto& itr : cfg_node) {
std::string k = itr.first.as<std::string>();
std::string v = itr.second.as<std::string>();
AIMRT_INFO("cfg [{} : {}]", k, v);
}
}
AIMRT_INFO("Init succeeded.");
return true;
}
bool HelloWorldModule::Start() {
AIMRT_INFO("Start succeeded.");
return true;
}
void HelloWorldModule::Shutdown() {
AIMRT_INFO("Shutdown succeeded.");
}
} // namespace aimrt::examples::cpp::helloworld::helloworld_module- [pkg_main.cc]
#include "aimrt_pkg_c_interface/pkg_macro.h"
#include "helloworld_module/helloworld_module.h"
static std::tuple<std::string_view, std::function<aimrt::ModuleBase*()>> aimrt_module_register_array[]{
{"HelloWorldModule", []() -> aimrt::ModuleBase* {
return new aimrt::examples::cpp::helloworld::helloworld_module::HelloWorldModule();
}}};
AIMRT_PKG_MAIN(aimrt_module_register_array)配置文件:
- [examples_cpp_helloworld_cfg.yaml]
aimrt:
log:
core_lvl: INFO # Trace/Debug/Info/Warn/Error/Fatal/Off
backends:
- type: console
module:
modules:
- name: HelloWorldModule
log_lvl: INFO
# Module custom configuration
HelloWorldModule:
key1: val1
key2: val2编译完成后,将生成的可执行文件helloworld_app和配置文件helloworld_cfg.yaml拷贝到一个目录下,然后执行以下命令运行进程,观察打印出来的日志:
./helloworld_app ./helloworld_cfg.yaml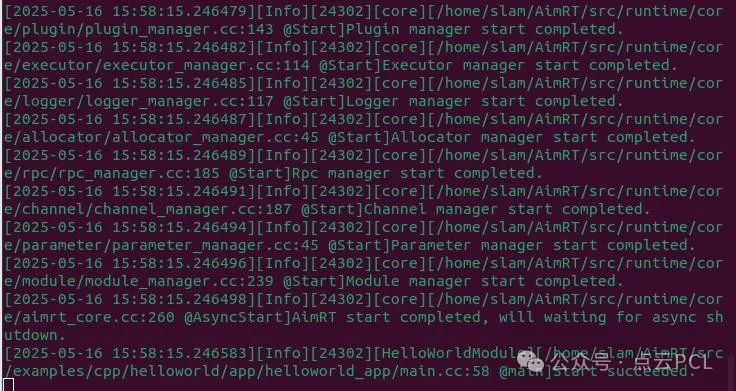
个人感受
AIMRT 更像是一个 应用集成型中间件框架,而不是一个传统意义上的“通用开发库”。
它的设计理念更偏向于:
- - 提供一整套运行环境;
- - 支持通信中间件(MQTT、ROS2、GRPC、Iceoryx等);
- - 具备分布式部署能力;
- - 插件式扩展;
- - 支持 Python、C++、CLI、多种插件机制;
- - 包含数据记录、时间操控、遥测、调试工具等。
换句话说,它更像是“给开发工业或机器人系统的人一个现成的基础平台”,而不是提供一个类似 Boost 或 Eigen 那样的轻量 C++ 库。
为什么编写一个 AIMRT 的 helloworld 很困难?
- - 模块之间强耦合,如 topic/logger、runtime/init、plugin 等;
- - 缺乏“可剥离结构”,一个功能可能依赖多个插件;
- - 没有提供足够独立的 target_link_libraries() 方式(不像 Boost、PCL、gRPC 那样可以局部链接)
优缺点
1. 依赖性
- 优点:支持多种后端通信协议、Python绑定、日志系统、遥测、记录回放等
- 缺点:构建过程重,依赖较多,构建时需要处理大量外部库(如 ROS2、Protobuf、gRPC、Zenoh、fmt、Python 等)
2. 结构复杂度
- 优点:插件化结构设计良好,模块清晰
- 缺点:入门门槛高、模块初始化流程复杂,很多功能需要环境变量或配置文件支持,难以直接“裸跑一个模块”
3. 文档/示例友好度
- 优点:有例子,有一定文档
- 缺点:缺乏“从0开始的最小可运行样例”,例如 helloworld.cpp + CMakeLists.txt 的组合不容易跑通;大量组件相互依赖,导致编译/运行不透明
4. 构建/打包方式
- 优点:CMake 配置齐全、支持安装、可嵌入较大工程
- 缺点:安装体积大,很多插件你不需要也被默认开启;CMake 参数繁多,新用户难以筛选精简配置;无法作为单个 .so 被快速集成
5. 使用模式分析
- 适合:中大型系统开发、机器人中间件、工业运行平台
- 不适合:想写一个简单 hello world、仅想使用某个通信库或组件的用户
它表面上是一个可复用的开源库,但实质上:它更像一个“框架+平台+组件集合”的中间件运行平台,不是面向开发者的纯粹开发库。这就是为何想写一个最简单的 “hello world”,却发现异常困难的原因。
总结

以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-05-16,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号