【YOLOv8】YOLOv8改进系列(1)----替换主干网络之EfficientViT(CVPR2023)

【YOLOv8】YOLOv8改进系列(1)----替换主干网络之EfficientViT(CVPR2023)

HABuo
发布于 2025-02-20 08:39:41
发布于 2025-02-20 08:39:41
💯一、EfficientViT介绍
- 论文题目:《EfficientViT: Memory Efficient Vision Transformer with Cascaded Group Attention》
- 论文地址:EfficientViT: Memory Efficient Vision Transformer With Cascaded Group Attention
- 源码地址:Cream/EfficientViT at main · microsoft/Cream · GitHub
1.1 简介
EfficientViT:作者是来自香港中文大学和微软研究院的研究团队。论文的主要内容是提出了一种新型的高效视觉变换器(Vision Transformer,简称ViT)模型,这种模型旨在解决传统ViT在计算成本高、不适合实时应用的问题。
- 问题陈述:传统的视觉变换器虽然性能出色,但计算成本高昂,不适合实时应用。
- EfficientViT提出:作者提出了EfficientViT,这是一种高速视觉变换器,通过设计新的构建模块和注意力机制来提高内存效率和计算效率。
- 主要贡献:
- 提出了一种新的构建模块,使用单一的内存限制的多头自注意力(MHSA)层夹在高效的前馈网络(FFN)层之间,以提高内存效率并增强通道间通信。
- 发现注意力图在不同头之间具有高度相似性,导致计算冗余。为此,提出了级联组注意力(CGA)模块,通过向不同的头提供完整的特征的不同分割来节省计算成本并提高注意力多样性。
- 通过在关键网络组件(如值投影)上增加通道宽度,同时缩小不太重要的组件(如FFN中的隐藏维度)来重新分配参数,从而提高模型参数效率。
1.2 网络结构
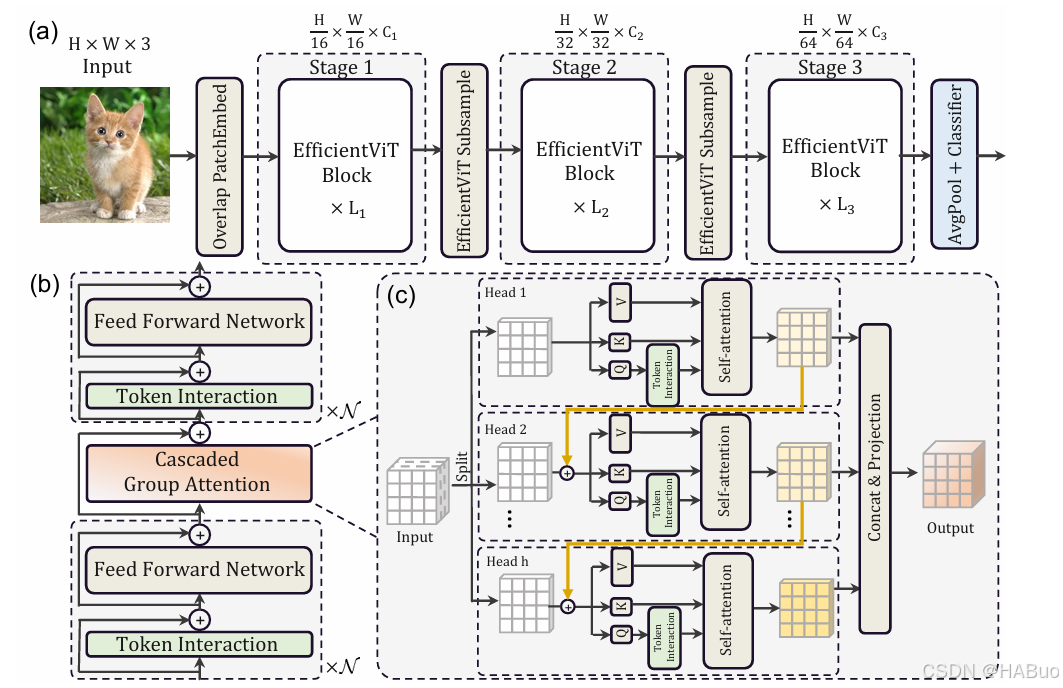
EfficientViT的网络结构包含三个主要阶段,每个阶段都堆叠了提出的EfficientViT构建模块。网络结构如上图所示,它引入了重叠的patch embedding来将16×16的图像块嵌入到具有C1维度的tokens中,这增强了模型在低级视觉表示学习中的能力。
EfficientViT的总体架构,具体包括:
- Overlap PatchEmbed:将16×16的图像块嵌入到具有C1维度的tokens中。
- EfficientViT Subsample:为了实现高效的下采样,提出了EfficientViT下采样块,它也具有三明治布局,只是将自注意力层替换为倒置残差块,以减少下采样期间的信息损失。
- BatchNorm (BN):整个模型中采用BN而不是Layer Norm (LN),因为BN可以折叠到前面的卷积或线性层中,这比LN在运行时更有优势。
- ReLU激活函数:使用ReLU作为激活函数,因为常用的GELU或HardSwish在某些推理部署平台上支持不佳,而且速度更慢。
EfficientViT的构建模块,它由以下几个部分组成:
- Sandwich Layout:这种布局在FFN层之间使用单个内存受限的MHSA层,以减少由MHSA中的内存限制操作引起的时间消耗,并应用更多的FFN层以高效地允许不同特征通道之间的通信。此外,每个FFN之前还应用了一个额外的token交互层,使用深度卷积(DWConv)引入局部结构信息的归纳偏差,增强模型能力。
- Cascaded Group Attention(CGA):为了提高计算效率,提出了一种新的注意力模块,它通过向不同的头提供完整的特征的不同分割,并在头之间级联输出特征。这种模块不仅减少了多头注意力中的计算冗余,而且通过增加网络深度来提升模型容量,而不引入任何额外的参数。
- Parameter Reallocation(参数重新分配):为了提高参数效率,通过扩大关键网络组件(如值投影)的通道宽度,同时缩小不太重要的组件(如FFN中的隐藏维度)来重新分配参数。这种重新分配策略最终促进了模型参数效率。
💯二、具体添加方法
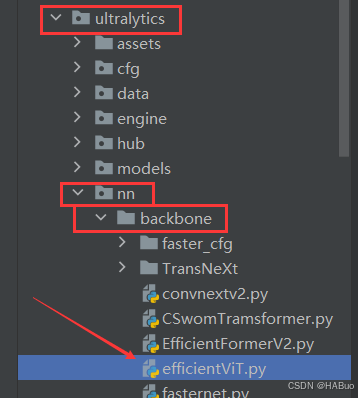
第①步:创建efficeintVit.py
创建完成后,将下面代码直接复制粘贴进去:
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.utils.checkpoint as checkpoint
import itertools
from timm.models.layers import SqueezeExcite
import numpy as np
import itertools
__all__ = ['EfficientViT_M0', 'EfficientViT_M1', 'EfficientViT_M2', 'EfficientViT_M3', 'EfficientViT_M4', 'EfficientViT_M5']
class Conv2d_BN(torch.nn.Sequential):
def __init__(self, a, b, ks=1, stride=1, pad=0, dilation=1,
groups=1, bn_weight_init=1, resolution=-10000):
super().__init__()
self.add_module('c', torch.nn.Conv2d(
a, b, ks, stride, pad, dilation, groups, bias=False))
self.add_module('bn', torch.nn.BatchNorm2d(b))
torch.nn.init.constant_(self.bn.weight, bn_weight_init)
torch.nn.init.constant_(self.bn.bias, 0)
@torch.no_grad()
def switch_to_deploy(self):
c, bn = self._modules.values()
w = bn.weight / (bn.running_var + bn.eps)**0.5
w = c.weight * w[:, None, None, None]
b = bn.bias - bn.running_mean * bn.weight / \
(bn.running_var + bn.eps)**0.5
m = torch.nn.Conv2d(w.size(1) * self.c.groups, w.size(
0), w.shape[2:], stride=self.c.stride, padding=self.c.padding, dilation=self.c.dilation, groups=self.c.groups)
m.weight.data.copy_(w)
m.bias.data.copy_(b)
return m
def replace_batchnorm(net):
for child_name, child in net.named_children():
if hasattr(child, 'fuse'):
setattr(net, child_name, child.fuse())
elif isinstance(child, torch.nn.BatchNorm2d):
setattr(net, child_name, torch.nn.Identity())
else:
replace_batchnorm(child)
class PatchMerging(torch.nn.Module):
def __init__(self, dim, out_dim, input_resolution):
super().__init__()
hid_dim = int(dim * 4)
self.conv1 = Conv2d_BN(dim, hid_dim, 1, 1, 0, resolution=input_resolution)
self.act = torch.nn.ReLU()
self.conv2 = Conv2d_BN(hid_dim, hid_dim, 3, 2, 1, groups=hid_dim, resolution=input_resolution)
self.se = SqueezeExcite(hid_dim, .25)
self.conv3 = Conv2d_BN(hid_dim, out_dim, 1, 1, 0, resolution=input_resolution // 2)
def forward(self, x):
x = self.conv3(self.se(self.act(self.conv2(self.act(self.conv1(x))))))
return x
class Residual(torch.nn.Module):
def __init__(self, m, drop=0.):
super().__init__()
self.m = m
self.drop = drop
def forward(self, x):
if self.training and self.drop > 0:
return x + self.m(x) * torch.rand(x.size(0), 1, 1, 1,
device=x.device).ge_(self.drop).div(1 - self.drop).detach()
else:
return x + self.m(x)
class FFN(torch.nn.Module):
def __init__(self, ed, h, resolution):
super().__init__()
self.pw1 = Conv2d_BN(ed, h, resolution=resolution)
self.act = torch.nn.ReLU()
self.pw2 = Conv2d_BN(h, ed, bn_weight_init=0, resolution=resolution)
def forward(self, x):
x = self.pw2(self.act(self.pw1(x)))
return x
class CascadedGroupAttention(torch.nn.Module):
r""" Cascaded Group Attention.
Args:
dim (int): Number of input channels.
key_dim (int): The dimension for query and key.
num_heads (int): Number of attention heads.
attn_ratio (int): Multiplier for the query dim for value dimension.
resolution (int): Input resolution, correspond to the window size.
kernels (List[int]): The kernel size of the dw conv on query.
"""
def __init__(self, dim, key_dim, num_heads=8,
attn_ratio=4,
resolution=14,
kernels=[5, 5, 5, 5],):
super().__init__()
self.num_heads = num_heads
self.scale = key_dim ** -0.5
self.key_dim = key_dim
self.d = int(attn_ratio * key_dim)
self.attn_ratio = attn_ratio
qkvs = []
dws = []
for i in range(num_heads):
qkvs.append(Conv2d_BN(dim // (num_heads), self.key_dim * 2 + self.d, resolution=resolution))
dws.append(Conv2d_BN(self.key_dim, self.key_dim, kernels[i], 1, kernels[i]//2, groups=self.key_dim, resolution=resolution))
self.qkvs = torch.nn.ModuleList(qkvs)
self.dws = torch.nn.ModuleList(dws)
self.proj = torch.nn.Sequential(torch.nn.ReLU(), Conv2d_BN(
self.d * num_heads, dim, bn_weight_init=0, resolution=resolution))
points = list(itertools.product(range(resolution), range(resolution)))
N = len(points)
attention_offsets = {}
idxs = []
for p1 in points:
for p2 in points:
offset = (abs(p1[0] - p2[0]), abs(p1[1] - p2[1]))
if offset not in attention_offsets:
attention_offsets[offset] = len(attention_offsets)
idxs.append(attention_offsets[offset])
self.attention_biases = torch.nn.Parameter(
torch.zeros(num_heads, len(attention_offsets)))
self.register_buffer('attention_bias_idxs',
torch.LongTensor(idxs).view(N, N))
@torch.no_grad()
def train(self, mode=True):
super().train(mode)
if mode and hasattr(self, 'ab'):
del self.ab
else:
self.ab = self.attention_biases[:, self.attention_bias_idxs]
def forward(self, x): # x (B,C,H,W)
B, C, H, W = x.shape
trainingab = self.attention_biases[:, self.attention_bias_idxs]
feats_in = x.chunk(len(self.qkvs), dim=1)
feats_out = []
feat = feats_in[0]
for i, qkv in enumerate(self.qkvs):
if i > 0: # add the previous output to the input
feat = feat + feats_in[i]
feat = qkv(feat)
q, k, v = feat.view(B, -1, H, W).split([self.key_dim, self.key_dim, self.d], dim=1) # B, C/h, H, W
q = self.dws[i](q)
q, k, v = q.flatten(2), k.flatten(2), v.flatten(2) # B, C/h, N
attn = (
(q.transpose(-2, -1) @ k) * self.scale
+
(trainingab[i] if self.training else self.ab[i])
)
attn = attn.softmax(dim=-1) # BNN
feat = (v @ attn.transpose(-2, -1)).view(B, self.d, H, W) # BCHW
feats_out.append(feat)
x = self.proj(torch.cat(feats_out, 1))
return x
class LocalWindowAttention(torch.nn.Module):
r""" Local Window Attention.
Args:
dim (int): Number of input channels.
key_dim (int): The dimension for query and key.
num_heads (int): Number of attention heads.
attn_ratio (int): Multiplier for the query dim for value dimension.
resolution (int): Input resolution.
window_resolution (int): Local window resolution.
kernels (List[int]): The kernel size of the dw conv on query.
"""
def __init__(self, dim, key_dim, num_heads=8,
attn_ratio=4,
resolution=14,
window_resolution=7,
kernels=[5, 5, 5, 5],):
super().__init__()
self.dim = dim
self.num_heads = num_heads
self.resolution = resolution
assert window_resolution > 0, 'window_size must be greater than 0'
self.window_resolution = window_resolution
self.attn = CascadedGroupAttention(dim, key_dim, num_heads,
attn_ratio=attn_ratio,
resolution=window_resolution,
kernels=kernels,)
def forward(self, x):
B, C, H, W = x.shape
if H <= self.window_resolution and W <= self.window_resolution:
x = self.attn(x)
else:
x = x.permute(0, 2, 3, 1)
pad_b = (self.window_resolution - H %
self.window_resolution) % self.window_resolution
pad_r = (self.window_resolution - W %
self.window_resolution) % self.window_resolution
padding = pad_b > 0 or pad_r > 0
if padding:
x = torch.nn.functional.pad(x, (0, 0, 0, pad_r, 0, pad_b))
pH, pW = H + pad_b, W + pad_r
nH = pH // self.window_resolution
nW = pW // self.window_resolution
# window partition, BHWC -> B(nHh)(nWw)C -> BnHnWhwC -> (BnHnW)hwC -> (BnHnW)Chw
x = x.view(B, nH, self.window_resolution, nW, self.window_resolution, C).transpose(2, 3).reshape(
B * nH * nW, self.window_resolution, self.window_resolution, C
).permute(0, 3, 1, 2)
x = self.attn(x)
# window reverse, (BnHnW)Chw -> (BnHnW)hwC -> BnHnWhwC -> B(nHh)(nWw)C -> BHWC
x = x.permute(0, 2, 3, 1).view(B, nH, nW, self.window_resolution, self.window_resolution,
C).transpose(2, 3).reshape(B, pH, pW, C)
if padding:
x = x[:, :H, :W].contiguous()
x = x.permute(0, 3, 1, 2)
return x
class EfficientViTBlock(torch.nn.Module):
""" A basic EfficientViT building block.
Args:
type (str): Type for token mixer. Default: 's' for self-attention.
ed (int): Number of input channels.
kd (int): Dimension for query and key in the token mixer.
nh (int): Number of attention heads.
ar (int): Multiplier for the query dim for value dimension.
resolution (int): Input resolution.
window_resolution (int): Local window resolution.
kernels (List[int]): The kernel size of the dw conv on query.
"""
def __init__(self, type,
ed, kd, nh=8,
ar=4,
resolution=14,
window_resolution=7,
kernels=[5, 5, 5, 5],):
super().__init__()
self.dw0 = Residual(Conv2d_BN(ed, ed, 3, 1, 1, groups=ed, bn_weight_init=0., resolution=resolution))
self.ffn0 = Residual(FFN(ed, int(ed * 2), resolution))
if type == 's':
self.mixer = Residual(LocalWindowAttention(ed, kd, nh, attn_ratio=ar, \
resolution=resolution, window_resolution=window_resolution, kernels=kernels))
self.dw1 = Residual(Conv2d_BN(ed, ed, 3, 1, 1, groups=ed, bn_weight_init=0., resolution=resolution))
self.ffn1 = Residual(FFN(ed, int(ed * 2), resolution))
def forward(self, x):
return self.ffn1(self.dw1(self.mixer(self.ffn0(self.dw0(x)))))
class EfficientViT(torch.nn.Module):
def __init__(self, img_size=400,
patch_size=16,
frozen_stages=0,
in_chans=3,
stages=['s', 's', 's'],
embed_dim=[64, 128, 192],
key_dim=[16, 16, 16],
depth=[1, 2, 3],
num_heads=[4, 4, 4],
window_size=[7, 7, 7],
kernels=[5, 5, 5, 5],
down_ops=[['subsample', 2], ['subsample', 2], ['']],
pretrained=None,
distillation=False,):
super().__init__()
resolution = img_size
self.patch_embed = torch.nn.Sequential(Conv2d_BN(in_chans, embed_dim[0] // 8, 3, 2, 1, resolution=resolution), torch.nn.ReLU(),
Conv2d_BN(embed_dim[0] // 8, embed_dim[0] // 4, 3, 2, 1, resolution=resolution // 2), torch.nn.ReLU(),
Conv2d_BN(embed_dim[0] // 4, embed_dim[0] // 2, 3, 2, 1, resolution=resolution // 4), torch.nn.ReLU(),
Conv2d_BN(embed_dim[0] // 2, embed_dim[0], 3, 1, 1, resolution=resolution // 8))
resolution = img_size // patch_size
attn_ratio = [embed_dim[i] / (key_dim[i] * num_heads[i]) for i in range(len(embed_dim))]
self.blocks1 = []
self.blocks2 = []
self.blocks3 = []
for i, (stg, ed, kd, dpth, nh, ar, wd, do) in enumerate(
zip(stages, embed_dim, key_dim, depth, num_heads, attn_ratio, window_size, down_ops)):
for d in range(dpth):
eval('self.blocks' + str(i+1)).append(EfficientViTBlock(stg, ed, kd, nh, ar, resolution, wd, kernels))
if do[0] == 'subsample':
#('Subsample' stride)
blk = eval('self.blocks' + str(i+2))
resolution_ = (resolution - 1) // do[1] + 1
blk.append(torch.nn.Sequential(Residual(Conv2d_BN(embed_dim[i], embed_dim[i], 3, 1, 1, groups=embed_dim[i], resolution=resolution)),
Residual(FFN(embed_dim[i], int(embed_dim[i] * 2), resolution)),))
blk.append(PatchMerging(*embed_dim[i:i + 2], resolution))
resolution = resolution_
blk.append(torch.nn.Sequential(Residual(Conv2d_BN(embed_dim[i + 1], embed_dim[i + 1], 3, 1, 1, groups=embed_dim[i + 1], resolution=resolution)),
Residual(FFN(embed_dim[i + 1], int(embed_dim[i + 1] * 2), resolution)),))
self.blocks1 = torch.nn.Sequential(*self.blocks1)
self.blocks2 = torch.nn.Sequential(*self.blocks2)
self.blocks3 = torch.nn.Sequential(*self.blocks3)
self.channel = [i.size(1) for i in self.forward(torch.randn(1, 3, 640, 640))]
def forward(self, x):
outs = []
x = self.patch_embed(x)
x = self.blocks1(x)
outs.append(x)
x = self.blocks2(x)
outs.append(x)
x = self.blocks3(x)
outs.append(x)
return outs
EfficientViT_m0 = {
'img_size': 224,
'patch_size': 16,
'embed_dim': [64, 128, 192],
'depth': [1, 2, 3],
'num_heads': [4, 4, 4],
'window_size': [7, 7, 7],
'kernels': [7, 5, 3, 3],
}
EfficientViT_m1 = {
'img_size': 224,
'patch_size': 16,
'embed_dim': [128, 144, 192],
'depth': [1, 2, 3],
'num_heads': [2, 3, 3],
'window_size': [7, 7, 7],
'kernels': [7, 5, 3, 3],
}
EfficientViT_m2 = {
'img_size': 224,
'patch_size': 16,
'embed_dim': [128, 192, 224],
'depth': [1, 2, 3],
'num_heads': [4, 3, 2],
'window_size': [7, 7, 7],
'kernels': [7, 5, 3, 3],
}
EfficientViT_m3 = {
'img_size': 224,
'patch_size': 16,
'embed_dim': [128, 240, 320],
'depth': [1, 2, 3],
'num_heads': [4, 3, 4],
'window_size': [7, 7, 7],
'kernels': [5, 5, 5, 5],
}
EfficientViT_m4 = {
'img_size': 224,
'patch_size': 16,
'embed_dim': [128, 256, 384],
'depth': [1, 2, 3],
'num_heads': [4, 4, 4],
'window_size': [7, 7, 7],
'kernels': [7, 5, 3, 3],
}
EfficientViT_m5 = {
'img_size': 224,
'patch_size': 16,
'embed_dim': [192, 288, 384],
'depth': [1, 3, 4],
'num_heads': [3, 3, 4],
'window_size': [7, 7, 7],
'kernels': [7, 5, 3, 3],
}
def EfficientViT_M0(pretrained='', frozen_stages=0, distillation=False, fuse=False, pretrained_cfg=None, model_cfg=EfficientViT_m0):
model = EfficientViT(frozen_stages=frozen_stages, distillation=distillation, pretrained=pretrained, **model_cfg)
if pretrained:
model.load_state_dict(update_weight(model.state_dict(), torch.load(pretrained)['model']))
if fuse:
replace_batchnorm(model)
return model
def EfficientViT_M1(pretrained='', frozen_stages=0, distillation=False, fuse=False, pretrained_cfg=None, model_cfg=EfficientViT_m1):
model = EfficientViT(frozen_stages=frozen_stages, distillation=distillation, pretrained=pretrained, **model_cfg)
if pretrained:
model.load_state_dict(update_weight(model.state_dict(), torch.load(pretrained)['model']))
if fuse:
replace_batchnorm(model)
return model
def EfficientViT_M2(pretrained='', frozen_stages=0, distillation=False, fuse=False, pretrained_cfg=None, model_cfg=EfficientViT_m2):
model = EfficientViT(frozen_stages=frozen_stages, distillation=distillation, pretrained=pretrained, **model_cfg)
if pretrained:
model.load_state_dict(update_weight(model.state_dict(), torch.load(pretrained)['model']))
if fuse:
replace_batchnorm(model)
return model
def EfficientViT_M3(pretrained='', frozen_stages=0, distillation=False, fuse=False, pretrained_cfg=None, model_cfg=EfficientViT_m3):
model = EfficientViT(frozen_stages=frozen_stages, distillation=distillation, pretrained=pretrained, **model_cfg)
if pretrained:
model.load_state_dict(update_weight(model.state_dict(), torch.load(pretrained)['model']))
if fuse:
replace_batchnorm(model)
return model
def EfficientViT_M4(pretrained='', frozen_stages=0, distillation=False, fuse=False, pretrained_cfg=None, model_cfg=EfficientViT_m4):
model = EfficientViT(frozen_stages=frozen_stages, distillation=distillation, pretrained=pretrained, **model_cfg)
if pretrained:
model.load_state_dict(update_weight(model.state_dict(), torch.load(pretrained)['model']))
if fuse:
replace_batchnorm(model)
return model
def EfficientViT_M5(pretrained='', frozen_stages=0, distillation=False, fuse=False, pretrained_cfg=None, model_cfg=EfficientViT_m5):
model = EfficientViT(frozen_stages=frozen_stages, distillation=distillation, pretrained=pretrained, **model_cfg)
if pretrained:
model.load_state_dict(update_weight(model.state_dict(), torch.load(pretrained)['model']))
if fuse:
replace_batchnorm(model)
return model
def update_weight(model_dict, weight_dict):
idx, temp_dict = 0, {}
for k, v in weight_dict.items():
# k = k[9:]
if k in model_dict.keys() and np.shape(model_dict[k]) == np.shape(v):
temp_dict[k] = v
idx += 1
model_dict.update(temp_dict)
print(f'loading weights... {idx}/{len(model_dict)} items')
return model_dict
if __name__ == '__main__':
model = EfficientViT_M0('efficientvit_m0.pth')
inputs = torch.randn((1, 3, 640, 640))
res = model(inputs)
for i in res:
print(i.size())创建了6个尺寸大小,分别是:(以EfficientViT_M0替换为例)
'YOLOv8_EfficientViT_M0',
'YOLOv8_EfficientViT_M1',
'YOLOv8_EfficientViT_M2',
'YOLOv8_EfficientViT_M3',
'YOLOv8_EfficientViT_M4',
'YOLOv8_EfficientViT_M5'第②步:修改task.py
(1) 引入创建的efficientViT文件

from ultralytics.nn.backbone.efficientViT import *(2)修改_predict_once函数
def _predict_once(self, x, profile=False, visualize=False, embed=None):
"""
Perform a forward pass through the network.
Args:
x (torch.Tensor): The input tensor to the model.
profile (bool): Print the computation time of each layer if True, defaults to False.
visualize (bool): Save the feature maps of the model if True, defaults to False.
embed (list, optional): A list of feature vectors/embeddings to return.
Returns:
(torch.Tensor): The last output of the model.
"""
y, dt, embeddings = [], [], [] # outputs
for idx, m in enumerate(self.model):
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
if hasattr(m, 'backbone'):
x = m(x)
for _ in range(5 - len(x)):
x.insert(0, None)
for i_idx, i in enumerate(x):
if i_idx in self.save:
y.append(i)
else:
y.append(None)
# print(f'layer id:{idx:>2} {m.type:>50} output shape:{", ".join([str(x_.size()) for x_ in x if x_ is not None])}')
x = x[-1]
else:
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
# if type(x) in {list, tuple}:
# if idx == (len(self.model) - 1):
# if type(x[1]) is dict:
# print(f'layer id:{idx:>2} {m.type:>50} output shape:{", ".join([str(x_.size()) for x_ in x[1]["one2one"]])}')
# else:
# print(f'layer id:{idx:>2} {m.type:>50} output shape:{", ".join([str(x_.size()) for x_ in x[1]])}')
# else:
# print(f'layer id:{idx:>2} {m.type:>50} output shape:{", ".join([str(x_.size()) for x_ in x if x_ is not None])}')
# elif type(x) is dict:
# print(f'layer id:{idx:>2} {m.type:>50} output shape:{", ".join([str(x_.size()) for x_ in x["one2one"]])}')
# else:
# if not hasattr(m, 'backbone'):
# print(f'layer id:{idx:>2} {m.type:>50} output shape:{x.size()}')
if visualize:
feature_visualization(x, m.type, m.i, save_dir=visualize)
if embed and m.i in embed:
embeddings.append(nn.functional.adaptive_avg_pool2d(x, (1, 1)).squeeze(-1).squeeze(-1)) # flatten
if m.i == max(embed):
return torch.unbind(torch.cat(embeddings, 1), dim=0)
return x(3)修改parse_model函数
可以直接把下面的代码粘贴到对应的位置中,后续的改进中,对应的模块就不需要做出改变,有改变处,后续会另有说明
def parse_model(d, ch, verbose=True, warehouse_manager=None): # model_dict, input_channels(3)
"""Parse a YOLO model.yaml dictionary into a PyTorch model."""
import ast
# Args
max_channels = float("inf")
nc, act, scales = (d.get(x) for x in ("nc", "activation", "scales"))
depth, width, kpt_shape = (d.get(x, 1.0) for x in ("depth_multiple", "width_multiple", "kpt_shape"))
if scales:
scale = d.get("scale")
if not scale:
scale = tuple(scales.keys())[0]
LOGGER.warning(f"WARNING ⚠️ no model scale passed. Assuming scale='{scale}'.")
if len(scales[scale]) == 3:
depth, width, max_channels = scales[scale]
elif len(scales[scale]) == 4:
depth, width, max_channels, threshold = scales[scale]
if act:
Conv.default_act = eval(act) # redefine default activation, i.e. Conv.default_act = nn.SiLU()
if verbose:
LOGGER.info(f"{colorstr('activation:')} {act}") # print
if verbose:
LOGGER.info(f"\n{'':>3}{'from':>20}{'n':>3}{'params':>10} {'module':<60}{'arguments':<50}")
ch = [ch]
layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
is_backbone = False
for i, (f, n, m, args) in enumerate(d["backbone"] + d["head"]): # from, number, module, args
try:
if m == 'node_mode':
m = d[m]
if len(args) > 0:
if args[0] == 'head_channel':
args[0] = int(d[args[0]])
t = m
m = getattr(torch.nn, m[3:]) if 'nn.' in m else globals()[m] # get module
except:
pass
for j, a in enumerate(args):
if isinstance(a, str):
with contextlib.suppress(ValueError):
try:
args[j] = locals()[a] if a in locals() else ast.literal_eval(a)
except:
args[j] = a
n = n_ = max(round(n * depth), 1) if n > 1 else n # depth gain
if m in {
Classify, Conv, ConvTranspose, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, Focus, BottleneckCSP, C1, C2, C2f, ELAN1, AConv, SPPELAN, C2fAttn, C3, C3TR,
C3Ghost, nn.Conv2d, nn.ConvTranspose2d, DWConvTranspose2d, C3x, RepC3, PSA, SCDown, C2fCIB, C2f_Faster, C2f_ODConv,
C2f_Faster_EMA, C2f_DBB, GSConv, GSConvns, VoVGSCSP, VoVGSCSPns, VoVGSCSPC, C2f_CloAtt, C3_CloAtt, SCConv, C2f_SCConv, C3_SCConv, C2f_ScConv, C3_ScConv,
C3_EMSC, C3_EMSCP, C2f_EMSC, C2f_EMSCP, RCSOSA, KWConv, C2f_KW, C3_KW, DySnakeConv, C2f_DySnakeConv, C3_DySnakeConv,
DCNv2, C3_DCNv2, C2f_DCNv2, DCNV3_YOLO, C3_DCNv3, C2f_DCNv3, C3_Faster, C3_Faster_EMA, C3_ODConv,
OREPA, OREPA_LargeConv, RepVGGBlock_OREPA, C3_OREPA, C2f_OREPA, C3_DBB, C3_REPVGGOREPA, C2f_REPVGGOREPA,
C3_DCNv2_Dynamic, C2f_DCNv2_Dynamic, C3_ContextGuided, C2f_ContextGuided, C3_MSBlock, C2f_MSBlock,
C3_DLKA, C2f_DLKA, CSPStage, SPDConv, RepBlock, C3_EMBC, C2f_EMBC, SPPF_LSKA, C3_DAttention, C2f_DAttention,
C3_Parc, C2f_Parc, C3_DWR, C2f_DWR, RFAConv, RFCAConv, RFCBAMConv, C3_RFAConv, C2f_RFAConv,
C3_RFCBAMConv, C2f_RFCBAMConv, C3_RFCAConv, C2f_RFCAConv, C3_FocusedLinearAttention, C2f_FocusedLinearAttention,
C3_AKConv, C2f_AKConv, AKConv, C3_MLCA, C2f_MLCA,
C3_UniRepLKNetBlock, C2f_UniRepLKNetBlock, C3_DRB, C2f_DRB, C3_DWR_DRB, C2f_DWR_DRB, CSP_EDLAN,
C3_AggregatedAtt, C2f_AggregatedAtt, DCNV4_YOLO, C3_DCNv4, C2f_DCNv4, HWD, SEAM,
C3_SWC, C2f_SWC, C3_iRMB, C2f_iRMB, C3_iRMB_Cascaded, C2f_iRMB_Cascaded, C3_iRMB_DRB, C2f_iRMB_DRB, C3_iRMB_SWC, C2f_iRMB_SWC,
C3_VSS, C2f_VSS, C3_LVMB, C2f_LVMB, RepNCSPELAN4, DBBNCSPELAN4, OREPANCSPELAN4, DRBNCSPELAN4, ADown, V7DownSampling,
C3_DynamicConv, C2f_DynamicConv, C3_GhostDynamicConv, C2f_GhostDynamicConv, C3_RVB, C2f_RVB, C3_RVB_SE, C2f_RVB_SE, C3_RVB_EMA, C2f_RVB_EMA, DGCST,
C3_RetBlock, C2f_RetBlock, C3_PKIModule, C2f_PKIModule, RepNCSPELAN4_CAA, C3_FADC, C2f_FADC, C3_PPA, C2f_PPA, SRFD, DRFD, RGCSPELAN,
C3_Faster_CGLU, C2f_Faster_CGLU, C3_Star, C2f_Star, C3_Star_CAA, C2f_Star_CAA, C3_KAN, C2f_KAN, C3_EIEM, C2f_EIEM, C3_DEConv, C2f_DEConv,
C3_SMPCGLU, C2f_SMPCGLU, C3_Heat, C2f_Heat, CSP_PTB, SimpleStem, VisionClueMerge, VSSBlock_YOLO, XSSBlock, GLSA, C2f_WTConv, WTConv2d, FeaturePyramidSharedConv,
C2f_FMB, LDConv, C2f_gConv, C2f_WDBB, C2f_DeepDBB, C2f_AdditiveBlock, C2f_AdditiveBlock_CGLU, CSP_MSCB, C2f_MSMHSA_CGLU, CSP_PMSFA, C2f_MogaBlock,
C2f_SHSA, C2f_SHSA_CGLU, C2f_SMAFB, C2f_SMAFB_CGLU, C2f_IdentityFormer, C2f_RandomMixing, C2f_PoolingFormer, C2f_ConvFormer, C2f_CaFormer,
C2f_IdentityFormerCGLU, C2f_RandomMixingCGLU, C2f_PoolingFormerCGLU, C2f_ConvFormerCGLU, C2f_CaFormerCGLU, CSP_MutilScaleEdgeInformationEnhance, C2f_FFCM,
C2f_SFHF, CSP_FreqSpatial, C2f_MSM, C2f_RAB, C2f_HDRAB, C2f_LFE, CSP_MutilScaleEdgeInformationSelect, C2f_SFA, C2f_CTA, C2f_CAMixer, MANet,
MANet_FasterBlock, MANet_FasterCGLU, MANet_Star, C2f_HFERB, C2f_DTAB, C2f_ETB, C2f_JDPM, C2f_AP, PSConv, C2f_Kat, C2f_Faster_KAN, C2f_Strip, C2f_StripCGLU
}:
if args[0] == 'head_channel':
args[0] = d[args[0]]
c1, c2 = ch[f], args[0]
if c2 != nc: # if c2 not equal to number of classes (i.e. for Classify() output)
c2 = make_divisible(min(c2, max_channels) * width, 8)
if m is C2fAttn:
args[1] = make_divisible(min(args[1], max_channels // 2) * width, 8) # embed channels
args[2] = int(
max(round(min(args[2], max_channels // 2 // 32)) * width, 1) if args[2] > 1 else args[2]
) # num heads
args = [c1, c2, *args[1:]]
if m in (KWConv, C2f_KW, C3_KW):
args.insert(2, f'layer{i}')
args.insert(2, warehouse_manager)
if m in (DySnakeConv,):
c2 = c2 * 3
if m in (RepNCSPELAN4, DBBNCSPELAN4, OREPANCSPELAN4, DRBNCSPELAN4, RepNCSPELAN4_CAA):
args[2] = make_divisible(min(args[2], max_channels) * width, 8)
args[3] = make_divisible(min(args[3], max_channels) * width, 8)
if m in {
BottleneckCSP, C1, C2, C2f, C2fAttn, C3, C3TR, C3Ghost, C3x, RepC3, C2fCIB, C2f_Faster, C2f_ODConv, C2f_Faster_EMA, C2f_DBB,
VoVGSCSP, VoVGSCSPns, VoVGSCSPC, C2f_CloAtt, C3_CloAtt, C2f_SCConv, C3_SCConv, C2f_ScConv, C3_ScConv,
C3_EMSC, C3_EMSCP, C2f_EMSC, C2f_EMSCP, RCSOSA, C2f_KW, C3_KW, C2f_DySnakeConv, C3_DySnakeConv,
C3_DCNv2, C2f_DCNv2, C3_DCNv3, C2f_DCNv3, C3_Faster, C3_Faster_EMA, C3_ODConv, C3_OREPA, C2f_OREPA, C3_DBB,
C3_REPVGGOREPA, C2f_REPVGGOREPA, C3_DCNv2_Dynamic, C2f_DCNv2_Dynamic, C3_ContextGuided, C2f_ContextGuided,
C3_MSBlock, C2f_MSBlock, C3_DLKA, C2f_DLKA, CSPStage, RepBlock, C3_EMBC, C2f_EMBC, C3_DAttention, C2f_DAttention,
C3_Parc, C2f_Parc, C3_DWR, C2f_DWR, C3_RFAConv, C2f_RFAConv, C3_RFCBAMConv, C2f_RFCBAMConv, C3_RFCAConv, C2f_RFCAConv,
C3_FocusedLinearAttention, C2f_FocusedLinearAttention, C3_AKConv, C2f_AKConv, C3_MLCA, C2f_MLCA,
C3_UniRepLKNetBlock, C2f_UniRepLKNetBlock, C3_DRB, C2f_DRB, C3_DWR_DRB, C2f_DWR_DRB, CSP_EDLAN,
C3_AggregatedAtt, C2f_AggregatedAtt, C3_DCNv4, C2f_DCNv4, C3_SWC, C2f_SWC,
C3_iRMB, C2f_iRMB, C3_iRMB_Cascaded, C2f_iRMB_Cascaded, C3_iRMB_DRB, C2f_iRMB_DRB, C3_iRMB_SWC, C2f_iRMB_SWC,
C3_VSS, C2f_VSS, C3_LVMB, C2f_LVMB, C3_DynamicConv, C2f_DynamicConv, C3_GhostDynamicConv, C2f_GhostDynamicConv,
C3_RVB, C2f_RVB, C3_RVB_SE, C2f_RVB_SE, C3_RVB_EMA, C2f_RVB_EMA, C3_RetBlock, C2f_RetBlock, C3_PKIModule, C2f_PKIModule,
C3_FADC, C2f_FADC, C3_PPA, C2f_PPA, RGCSPELAN, C3_Faster_CGLU, C2f_Faster_CGLU, C3_Star, C2f_Star, C3_Star_CAA, C2f_Star_CAA,
C3_KAN, C2f_KAN, C3_EIEM, C2f_EIEM, C3_DEConv, C2f_DEConv, C3_SMPCGLU, C2f_SMPCGLU, C3_Heat, C2f_Heat, CSP_PTB, XSSBlock, C2f_WTConv,
C2f_FMB, C2f_gConv, C2f_WDBB, C2f_DeepDBB, C2f_AdditiveBlock, C2f_AdditiveBlock_CGLU, CSP_MSCB, C2f_MSMHSA_CGLU, CSP_PMSFA, C2f_MogaBlock,
C2f_SHSA, C2f_SHSA_CGLU, C2f_SMAFB, C2f_SMAFB_CGLU, C2f_IdentityFormer, C2f_RandomMixing, C2f_PoolingFormer, C2f_ConvFormer, C2f_CaFormer,
C2f_IdentityFormerCGLU, C2f_RandomMixingCGLU, C2f_PoolingFormerCGLU, C2f_ConvFormerCGLU, C2f_CaFormerCGLU, CSP_MutilScaleEdgeInformationEnhance, C2f_FFCM,
C2f_SFHF, CSP_FreqSpatial, C2f_MSM, C2f_RAB, C2f_HDRAB, C2f_LFE, CSP_MutilScaleEdgeInformationSelect, C2f_SFA, C2f_CTA, C2f_CAMixer, MANet,
MANet_FasterBlock, MANet_FasterCGLU, MANet_Star, C2f_HFERB, C2f_DTAB, C2f_ETB, C2f_JDPM, C2f_AP, C2f_Kat, C2f_Faster_KAN, C2f_Strip, C2f_StripCGLU
}:
args.insert(2, n) # number of repeats
n = 1
elif m in {AIFI, AIFI_RepBN}:
args = [ch[f], *args]
c2 = args[0]
elif m in (HGStem, HGBlock, Ghost_HGBlock, Rep_HGBlock, Dynamic_HGBlock, EIEStem):
c1, cm, c2 = ch[f], args[0], args[1]
if c2 != nc: # if c2 not equal to number of classes (i.e. for Classify() output)
c2 = make_divisible(min(c2, max_channels) * width, 8)
cm = make_divisible(min(cm, max_channels) * width, 8)
args = [c1, cm, c2, *args[2:]]
if m in (HGBlock, Ghost_HGBlock, Rep_HGBlock, Dynamic_HGBlock):
args.insert(4, n) # number of repeats
n = 1
elif m is ResNetLayer:
c2 = args[1] if args[3] else args[1] * 4
elif m is nn.BatchNorm2d:
args = [ch[f]]
elif m is Concat:
c2 = sum(ch[x] for x in f)
elif m in ((WorldDetect, ImagePoolingAttn) + DETECT_CLASS + V10_DETECT_CLASS + SEGMENT_CLASS + POSE_CLASS + OBB_CLASS):
args.append([ch[x] for x in f])
if m in SEGMENT_CLASS:
args[2] = make_divisible(min(args[2], max_channels) * width, 8)
if m in (Segment_LSCD, Segment_TADDH, Segment_LSCSBD, Segment_LSDECD, Segment_RSCD):
args[3] = make_divisible(min(args[3], max_channels) * width, 8)
if m in (Detect_LSCD, Detect_TADDH, Detect_LSCSBD, Detect_LSDECD, Detect_RSCD, v10Detect_LSCD, v10Detect_TADDH, v10Detect_RSCD, v10Detect_LSDECD):
args[1] = make_divisible(min(args[1], max_channels) * width, 8)
if m in (Pose_LSCD, Pose_TADDH, Pose_LSCSBD, Pose_LSDECD, Pose_RSCD, OBB_LSCD, OBB_TADDH, OBB_LSCSBD, OBB_LSDECD, OBB_RSCD):
args[2] = make_divisible(min(args[2], max_channels) * width, 8)
elif m is RTDETRDecoder: # special case, channels arg must be passed in index 1
args.insert(1, [ch[x] for x in f])
elif m is Fusion:
args[0] = d[args[0]]
c1, c2 = [ch[x] for x in f], (sum([ch[x] for x in f]) if args[0] == 'concat' else ch[f[0]])
args = [c1, args[0]]
elif m is CBLinear:
c2 = make_divisible(min(args[0][-1], max_channels) * width, 8)
c1 = ch[f]
args = [c1, [make_divisible(min(c2_, max_channels) * width, 8) for c2_ in args[0]], *args[1:]]
elif m is CBFuse:
c2 = ch[f[-1]]
elif isinstance(m, str):
t = m
if len(args) == 2:
m = timm.create_model(m, pretrained=args[0], pretrained_cfg_overlay={'file':args[1]}, features_only=True)
elif len(args) == 1:
m = timm.create_model(m, pretrained=args[0], features_only=True)
c2 = m.feature_info.channels()
elif m in {convnextv2_atto, convnextv2_femto, convnextv2_pico, convnextv2_nano, convnextv2_tiny, convnextv2_base, convnextv2_large, convnextv2_huge,
fasternet_t0, fasternet_t1, fasternet_t2, fasternet_s, fasternet_m, fasternet_l,
EfficientViT_M0, EfficientViT_M1, EfficientViT_M2, EfficientViT_M3, EfficientViT_M4, EfficientViT_M5,
efficientformerv2_s0, efficientformerv2_s1, efficientformerv2_s2, efficientformerv2_l,
vanillanet_5, vanillanet_6, vanillanet_7, vanillanet_8, vanillanet_9, vanillanet_10, vanillanet_11, vanillanet_12, vanillanet_13, vanillanet_13_x1_5, vanillanet_13_x1_5_ada_pool,
RevCol,
lsknet_t, lsknet_s,
SwinTransformer_Tiny,
repvit_m0_9, repvit_m1_0, repvit_m1_1, repvit_m1_5, repvit_m2_3,
CSWin_tiny, CSWin_small, CSWin_base, CSWin_large,
unireplknet_a, unireplknet_f, unireplknet_p, unireplknet_n, unireplknet_t, unireplknet_s, unireplknet_b, unireplknet_l, unireplknet_xl,
transnext_micro, transnext_tiny, transnext_small, transnext_base,
RMT_T, RMT_S, RMT_B, RMT_L,
PKINET_T, PKINET_S, PKINET_B,
MobileNetV4ConvSmall, MobileNetV4ConvMedium, MobileNetV4ConvLarge, MobileNetV4HybridMedium, MobileNetV4HybridLarge,
starnet_s050, starnet_s100, starnet_s150, starnet_s1, starnet_s2, starnet_s3, starnet_s4
}:
if m is RevCol:
args[1] = [make_divisible(min(k, max_channels) * width, 8) for k in args[1]]
args[2] = [max(round(k * depth), 1) for k in args[2]]
m = m(*args)
c2 = m.channel
elif m in {EMA, SpatialAttention, BiLevelRoutingAttention, BiLevelRoutingAttention_nchw,
TripletAttention, CoordAtt, CBAM, BAMBlock, LSKBlock, ScConv, LAWDS, EMSConv, EMSConvP,
SEAttention, CPCA, Partial_conv3, FocalModulation, EfficientAttention, MPCA, deformable_LKA,
EffectiveSEModule, LSKA, SegNext_Attention, DAttention, MLCA, TransNeXt_AggregatedAttention,
FocusedLinearAttention, LocalWindowAttention, ChannelAttention_HSFPN, ELA_HSFPN, CA_HSFPN, CAA_HSFPN,
DySample, CARAFE, CAA, ELA, CAFM, AFGCAttention, EUCB, ContrastDrivenFeatureAggregation, FSA}:
c2 = ch[f]
args = [c2, *args]
# print(args)
elif m in {SimAM, SpatialGroupEnhance}:
c2 = ch[f]
elif m is ContextGuidedBlock_Down:
c2 = ch[f] * 2
args = [ch[f], c2, *args]
elif m is BiFusion:
c1 = [ch[x] for x in f]
c2 = make_divisible(min(args[0], max_channels) * width, 8)
args = [c1, c2]
# --------------GOLD-YOLO--------------
elif m in {SimFusion_4in, AdvPoolFusion}:
c2 = sum(ch[x] for x in f)
elif m is SimFusion_3in:
c2 = args[0]
if c2 != nc: # if c2 not equal to number of classes (i.e. for Classify() output)
c2 = make_divisible(min(c2, max_channels) * width, 8)
args = [[ch[f_] for f_ in f], c2]
elif m is IFM:
c1 = ch[f]
c2 = sum(args[0])
args = [c1, *args]
elif m is InjectionMultiSum_Auto_pool:
c1 = ch[f[0]]
c2 = args[0]
args = [c1, *args]
elif m is PyramidPoolAgg:
c2 = args[0]
args = [sum([ch[f_] for f_ in f]), *args]
elif m is TopBasicLayer:
c2 = sum(args[1])
# --------------GOLD-YOLO--------------
# --------------ASF--------------
elif m is Zoom_cat:
c2 = sum(ch[x] for x in f)
elif m is Add:
c2 = ch[f[-1]]
elif m in {ScalSeq, DynamicScalSeq}:
c1 = [ch[x] for x in f]
c2 = make_divisible(args[0] * width, 8)
args = [c1, c2]
elif m is asf_attention_model:
args = [ch[f[-1]]]
# --------------ASF--------------
elif m is SDI:
args = [[ch[x] for x in f]]
elif m is Multiply:
c2 = ch[f[0]]
elif m is FocusFeature:
c1 = [ch[x] for x in f]
c2 = int(c1[1] * 0.5 * 3)
args = [c1, *args]
elif m is DASI:
c1 = [ch[x] for x in f]
args = [c1, c2]
elif m is CSMHSA:
c1 = [ch[x] for x in f]
c2 = ch[f[-1]]
args = [c1, c2]
elif m is CFC_CRB:
c1 = ch[f]
c2 = c1 // 2
args = [c1, *args]
elif m is SFC_G2:
c1 = [ch[x] for x in f]
c2 = c1[0]
args = [c1]
elif m in {CGAFusion, CAFMFusion, SDFM, PSFM}:
c2 = ch[f[1]]
args = [c2, *args]
elif m in {ContextGuideFusionModule}:
c1 = [ch[x] for x in f]
c2 = 2 * c1[1]
args = [c1]
# elif m in {PSA}:
# c2 = ch[f]
# args = [c2, *args]
elif m in {SBA}:
c1 = [ch[x] for x in f]
c2 = c1[-1]
args = [c1, c2]
elif m in {WaveletPool}:
c2 = ch[f] * 4
elif m in {WaveletUnPool}:
c2 = ch[f] // 4
elif m in {CSPOmniKernel}:
c2 = ch[f]
args = [c2]
elif m in {ChannelTransformer, PyramidContextExtraction}:
c1 = [ch[x] for x in f]
c2 = c1
args = [c1]
elif m in {RCM}:
c2 = ch[f]
args = [c2, *args]
elif m in {DynamicInterpolationFusion}:
c2 = ch[f[0]]
args = [[ch[x] for x in f]]
elif m in {FuseBlockMulti}:
c2 = ch[f[0]]
args = [c2]
elif m in {CrossLayerChannelAttention, CrossLayerSpatialAttention}:
c2 = [ch[x] for x in f]
args = [c2[0], *args]
elif m in {FreqFusion}:
c2 = ch[f[0]]
args = [[ch[x] for x in f], *args]
elif m in {DynamicAlignFusion}:
c2 = args[0]
args = [[ch[x] for x in f], c2]
elif m in {ConvEdgeFusion}:
c2 = make_divisible(min(args[0], max_channels) * width, 8)
args = [[ch[x] for x in f], c2]
elif m in {MutilScaleEdgeInfoGenetator}:
c1 = ch[f]
c2 = [make_divisible(min(i, max_channels) * width, 8) for i in args[0]]
args = [c1, c2]
elif m in {MultiScaleGatedAttn}:
c1 = [ch[x] for x in f]
c2 = min(c1)
args = [c1]
elif m in {WFU, MultiScalePCA, MultiScalePCA_Down}:
c1 = [ch[x] for x in f]
c2 = c1[0]
args = [c1]
elif m in {GetIndexOutput}:
c2 = ch[f][args[0]]
elif m is HyperComputeModule:
c1, c2 = ch[f], args[0]
c2 = make_divisible(min(c2, max_channels) * width, 8)
args = [c1, c2, threshold]
else:
c2 = ch[f]
if isinstance(c2, list) and m not in {ChannelTransformer, PyramidContextExtraction, CrossLayerChannelAttention, CrossLayerSpatialAttention, MutilScaleEdgeInfoGenetator}:
is_backbone = True
m_ = m
m_.backbone = True
else:
m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
t = str(m)[8:-2].replace('__main__.', '') # module type
m.np = sum(x.numel() for x in m_.parameters()) # number params
m_.i, m_.f, m_.type = i + 4 if is_backbone else i, f, t # attach index, 'from' index, type
if verbose:
LOGGER.info(f"{i:>3}{str(f):>20}{n_:>3}{m.np:10.0f} {t:<60}{str(args):<50}") # print
save.extend(x % (i + 4 if is_backbone else i) for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
layers.append(m_)
if i == 0:
ch = []
if isinstance(c2, list) and m not in {ChannelTransformer, PyramidContextExtraction, CrossLayerChannelAttention, CrossLayerSpatialAttention, MutilScaleEdgeInfoGenetator}:
ch.extend(c2)
for _ in range(5 - len(ch)):
ch.insert(0, 0)
else:
ch.append(c2)
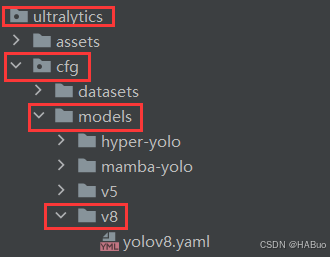
return nn.Sequential(*layers), sorted(save)第③步:yolov8.yaml文件修改
在下述文件夹中创立yolov8-efficientViT.yaml
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# 0-P1/2
# 1-P2/4
# 2-P3/8
# 3-P4/16
# 4-P5/32
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, EfficientViT_M0, []] # 4
- [-1, 1, SPPF, [1024, 5]] # 5
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 6
- [[-1, 3], 1, Concat, [1]] # 7 cat backbone P4
- [-1, 3, C2f, [512]] # 8
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 9
- [[-1, 2], 1, Concat, [1]] # 10 cat backbone P3
- [-1, 3, C2f, [256]] # 11 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]] # 12
- [[-1, 8], 1, Concat, [1]] # 13 cat head P4
- [-1, 3, C2f, [512]] # 14 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]] # 15
- [[-1, 5], 1, Concat, [1]] # 16 cat head P5
- [-1, 3, C2f, [1024]] # 17 (P5/32-large)
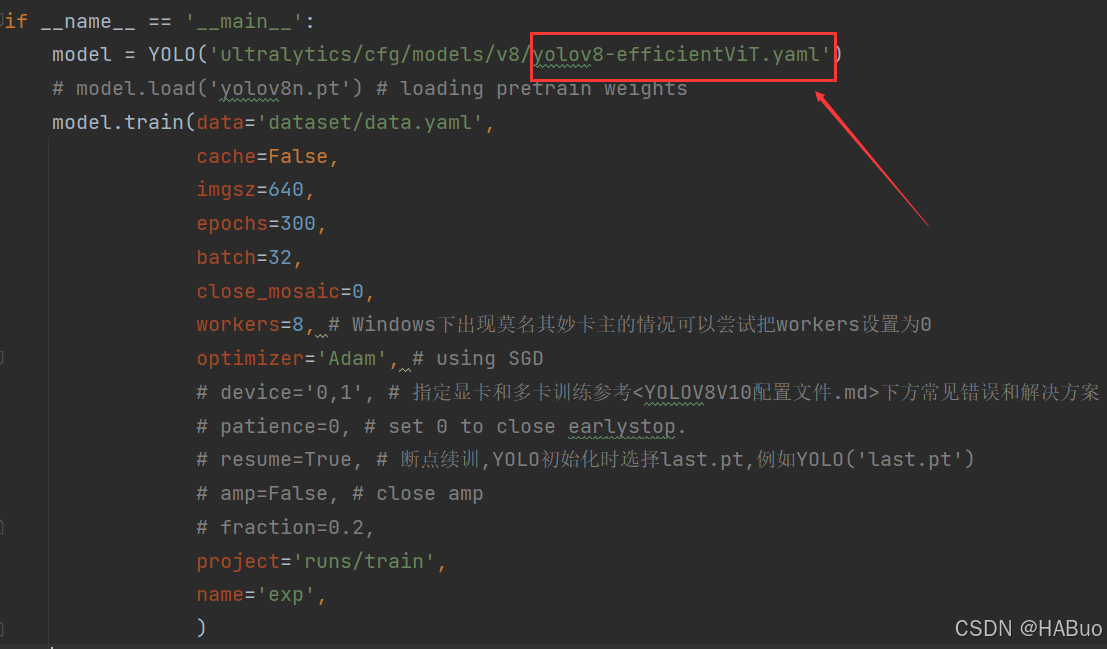
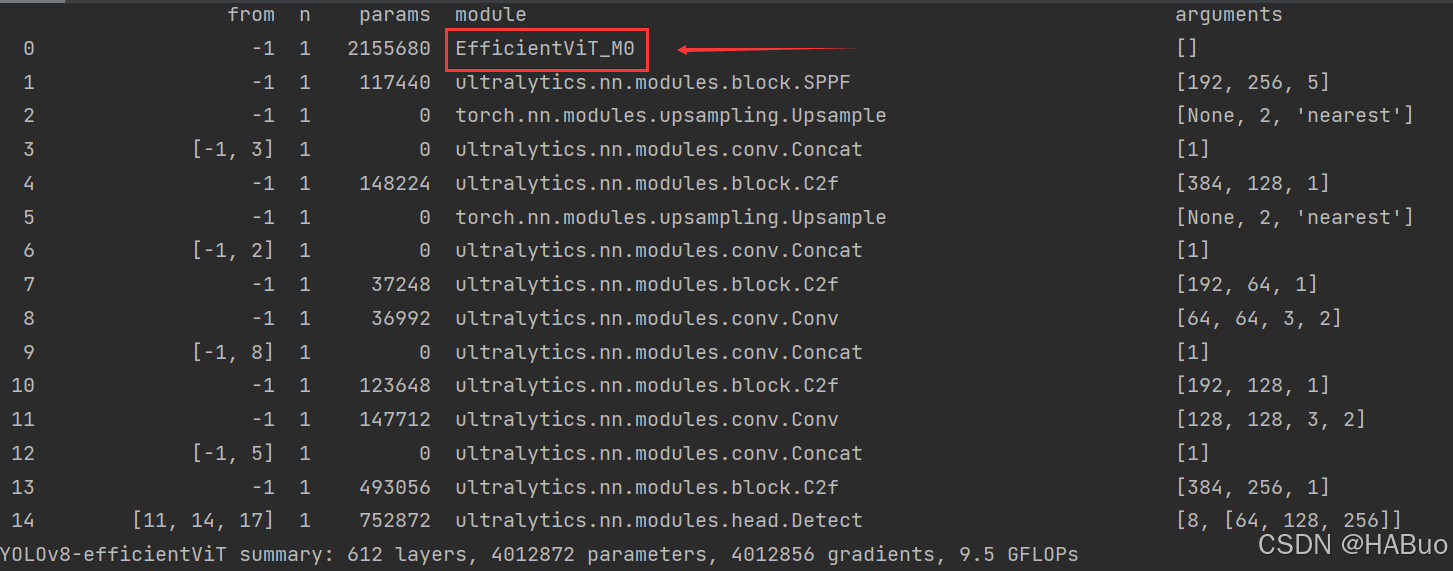
- [[11, 14, 17], 1, Detect, [nc]] # Detect(P3, P4, P5)第④步:验证是否加入成功
将train.py中的配置文件进行修改,并运行
本文参与 腾讯云自媒体同步曝光计划,分享自作者个人站点/博客。
原始发表:2025-02-19,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号