人形机器人的“神经系统”大揭秘:它靠什么“想得快,动得准”?

人形机器人的“神经系统”大揭秘:它靠什么“想得快,动得准”?

霞姐聊IT
发布于 2026-05-20 10:22:18
发布于 2026-05-20 10:22:18
当一台高端人形机器人稳稳地向你走来、转身、起舞时,它的动作为什么既精准又流畅? 秘诀不在AI大脑有多聪明,也不在电机多强,而在它体内那套看不见的“神经系统”——通信总线。
下面就让我们一起拆开机器人的内部世界,看看它是如何感知、指挥、协同的。
一、总线是什么?——机器人的神经纤维
用人的身体来类比,一眼就能看懂总线的作用:我们想走路、抬手,由大脑下发指令,通过神经系统快速传递到全身肌肉,四肢才能协调动作。
人形机器人的工作逻辑,和人体这套运作机制几乎完全一致。
机器人部件 | 类比人体 | 核心功能 |
|---|---|---|
主控芯片 | 大脑 | 负责行为决策、路径规划、动作逻辑编排 |
伺服电机/驱动器 | 肌肉 | 负责落地执行各类肢体动作 |
通信总线 | 神经系统 | 高速下发控制指令,实时回传传感器状态 |
通信总线,就像机器人全身的神经纤维,把顶层的行为决策与底层的肢体执行无缝串联,瞬间同步到每一个关节。
依靠微秒级超低时延,所有关节能精准卡在同一节拍协同运动;
一旦总线性能不足、信号传输滞后,机器人就如同神经传导失灵,动作拖沓、肢体配合错乱,严重时直接失衡摔倒。
可以说:总线直接决定人形机器人的响应速度、动作同步精度,同时深刻影响整机成本与运行稳定性,是藏在机身内部、真正决定整机上限的隐形核心。
二、 明星选手EtherCAT:高端人形机器人的顶配神经
在高端人形机器人架构中,EtherCAT(Ethernet for Control Automation Technology,控制自动化技术用以太网) 就是性能拉满的顶级神经纤维。
它起源于工业机械臂的实时控制标准,但在机器人身上应用时,更像是一条从大脑直达四肢肌肉的高速专用通道。
EtherCAT 的崛起并非偶然,其背后有着清晰的发展脉络、成熟的市场生态,而主站与从站的协同运作则是实现低时延、高同步的核心关键。
1.发展历史 EtherCAT由德国倍福(Beckhoff)公司于2003年研发推出,初衷是解决传统工业总线实时性不足、扩展性有限的问题。
它专为工业自动化设计,通过独特的报文处理机制,打破了普通以太网与工业控制总线的壁垒,实现远超传统总线的实时性能。
最初广泛应用于工业机械臂、数控机床等高精设备,随后随着人形机器人对高精度运动控制的需求增长,EtherCAT 被逐步引入,成为高端机型的主流选择。
2.市场情况 目前,EtherCAT 已成为全球工业实时总线的主流方案。
据市场调研,其在总线型运动控制器市场的占比已超过六成,全球上百家厂商参与生态建设,包括倍福(Beckhoff)、博世力士乐(Bosch Rexroth)、西门子(Siemens)、欧姆龙(Omron)等国际巨头。
国内也有众多企业布局相关芯片与解决方案。
在高端人形机器人领域,EtherCAT 占据绝对主导地位,优必选、Figure AI、智元等厂商均将其作为核心运动总线,其市场渗透率持续提升,预计未来几年仍将稳步增长。
3. 主站与从站的核心定义(通俗理解) EtherCAT 网络的正常运行依赖主站与从站的协同配合,二者分工明确、缺一不可,并非平级关系,而是“总指挥”与“执行者”的协作模式:
(1)主站
相当于EtherCAT 总线的“总指挥”,统筹全局。
核心职责:扫描识别网络中所有从站设备、配置参数、维护全网同步时钟、周期性下发控制指令、接收从站回传的状态数据。
主站无需专用芯片,依托普通以太网硬件+ 开源软件栈(如 SOEM、IgH)即可搭建。
其中SOEM 轻量、可移植,适合低成本、资源受限场景;
IgH 功能完整,适配复杂工业级系统,满足人形机器人多关节协同的高实时需求。
(2)从站
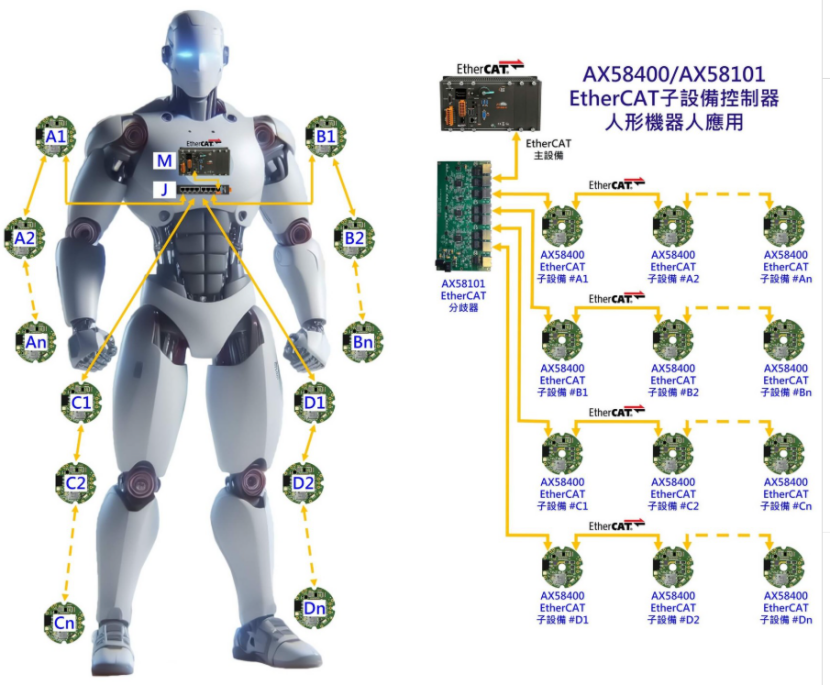
相当于挂在总线上的“执行者”,负责具体功能节点,例如伺服驱动器、传感器模块、IO 单元等。
核心职责:响应主站指令,执行动作控制(如关节转动)、采集设备状态(如电机温度、角度),并实时回传数据。
从站核心通信模块需ESC(EtherCAT Slave Controller)专用芯片或集成 EtherCAT硬件MAC的MCU,这是 EtherCAT 成本偏高的主要原因之一。
ESC 类似从站的“通信接口员”,负责报文接收、转发与解析,是从站接入总线的关键。
核心优势一览
优势 | 描述 |
|---|---|
微秒级延迟 | 控制指令瞬时下发至每个关节,几乎无感知时延 |
纳秒级时钟同步 | 全身关节共用高精度节拍器,动作整齐划一、不抢拍 |
超大节点扩展 | 可挂载几十甚至上万级设备,躯干、四肢、灵巧手、传感器可全线串联 |
技术补充
整体成本偏高主要在从站芯片、协议栈适配及工程落地门槛,而非主站硬件,这也是EtherCAT 广泛应用于高端机器人而非低成本机型的核心原因。
一句话总结 EtherCAT 凭借低延迟、高同步和大挂载能力,成为高端人形机器人动作流畅、协同精准的底层性能基石。
三、 老将CAN/CAN FD 总线:高性价比的辅助神经
并非所有关节都需要顶配的实时总线。 对于机器人手指、手腕、头部等动作幅度小、对实时性要求适中的部件,通常采用经典的CAN/CAN FD 总线。

CAN 总线起源于汽车工业,已在车载网络和工业设备中广泛应用。
其最大特点是高可靠、强抗干扰、成本低廉,尤其在工业强电磁环境和电机干扰下仍能稳定运行。
速率对比
- 标准CAN:最高1 Mbps
- CAN FD:最高 8 Mbps(部分方案可达 12 Mbps)
- EtherCAT:标准100 Mbps,可扩展至千兆级
从数据可见,CAN 的速率虽低于 EtherCAT,但完全足以满足大多数低速外设和非核心关节的控制需求。
高端人形机器人通常采用分层混合总线设计:
EtherCAT:承担躯干、四肢等核心大关节的高速实时控制
CAN / CAN FD:作为高性价比补充,负责末梢和低速自由度关节
这种分层搭配既保证了整机运动性能,又合理控制BOM 和研发成本。
不过,虽然对于普通手指或头部低速自由度,CAN / CAN FD 完全够用。
但是对于某些特定场景,比如需实现多通道高频触觉力控或密集传感器组网的高端灵巧手,通常仍会选择EtherCAT 或高速SPI,以提供足够的带宽和同步能力,支撑精细闭环控制。
四、 人形机器人总线与自动驾驶汽车总线的共通逻辑
人形机器人和自动驾驶汽车,看似属于两个行业,但它们正在走向越来越相似的底层通信架构。
因为二者都在解决同一个核心问题:
如何让一个拥有大量传感器、执行器和控制节点的复杂系统,在极短时间内完成“感知—决策—执行”的高可靠协同。
1. 核心控制网络:高速主干正在成为共同选择
在人形机器人中,躯干、腿部等核心大关节,需要依靠EtherCAT 这类高实时总线实现微秒级同步控制,才能保证行走、奔跑、平衡等高动态动作稳定流畅。
而在自动驾驶汽车中,真正承担“神经主干”角色的,也越来越多地由 高速汽车以太网(Automotive Ethernet) 来完成。
随着摄像头、激光雷达、域控制器和中央计算平台的数据量爆发式增长,传统CAN 总线已难以承载自动驾驶时代的海量数据交换。因此,现代智能汽车正在逐步形成:
高速以太网主干:负责自动驾驶感知、融合计算与核心控制链路
低速控制网络:负责边缘执行器、车身电子与辅助设备通信
这种架构,与人形机器人采用的“EtherCAT 主干 + 边缘低速总线”思路高度一致。
本质上,二者都在通过:
“高速主干 + 分层边缘网络”
来平衡实时性、带宽、可靠性与系统成本。
2. 边缘低速网络:稳定、低成本、抗干扰
并不是所有模块都需要顶级实时性能。
在人形机器人中,手指、头部、表情机构等低速自由度,通常采用CAN/CAN FD,以更低成本满足控制需求。
智能汽车也是同样逻辑。大量边缘电子设备依然运行在传统低速网络上,用于完成基础控制与状态通信。
这种分层设计的价值在于:
- 核心控制不受低优先级信号干扰
- 系统稳定性更高
- 线束与硬件成本更可控
- 整体架构更容易扩展
3. 一个越来越明显的趋势
过去,工业机器人、汽车电子、自动化设备属于相对独立的技术体系。
但今天,无论是人形机器人,还是自动驾驶汽车,它们的底层通信哲学正在快速趋同:
- 都在向中央计算平台集中
- 都在强化高速实时主干
- 都在采用分层异构网络
- 都越来越依赖“软件定义硬件”
因为无论是“让机器人稳定行走”,还是“让汽车安全自动驾驶”,最终都离不开一件事:
用一套高可靠、强同步、低时延的“数字神经系统”,协调全身。
五、 以特斯拉Optimus 为例推演:一套总线如何驱动全身40 个关节
特斯拉官方并未公开Optimus 的完整总线架构,但结合行业主流方案与供应链信息,可以做出相对合理的推测。
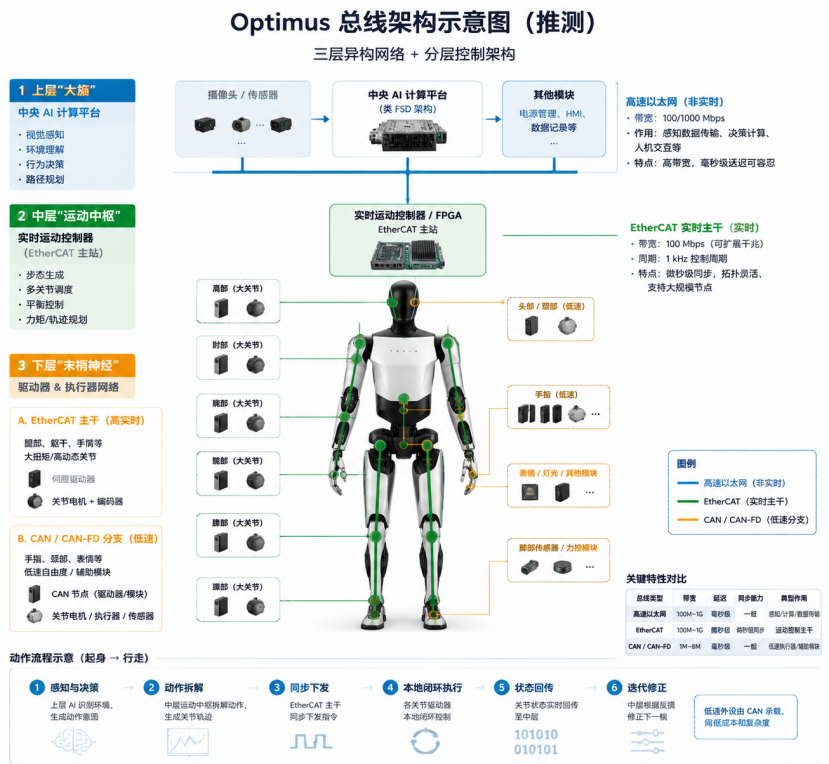
作为一台拥有约40 个自由度的人形机器人,Optimus 对运动同步、实时控制和整机功耗都有极高要求,其底层大概率采用的是:
“三层异构网络 + 分层控制”的架构设计。
1. 上层“大脑”:中央 AI 计算平台 + 高速以太网
最上层负责:
- 视觉感知
- 环境理解
- 行为决策
- 路径规划
这一层更像机器人的“大脑皮层”,重点在于海量数据处理与 AI 推理,因此需要高带宽互联,但对微秒级实时性的要求相对没那么苛刻。
摄像头、传感器、中央计算平台之间,大概率通过高速以太网完成数据交换。其整体架构思路,也应当是继承了特斯拉自动驾驶FSD 系统的技术路线。
2. 中层“运动中枢”:EtherCAT 实时控制网络
真正负责“让身体动起来”的,是中层运动控制系统。
这一层通常由实时控制器或FPGA 构建 EtherCAT 主站,负责:
- 步态生成
- 多关节时序调度
- 全身平衡控制
- 力矩与轨迹规划
它会将“向前走”这样的高级动作,拆解成髋、膝、踝、肩等多个关节的角度、速度与力矩轨迹,并以约 1kHz 的控制周期持续下发控制帧。
EtherCAT 的微秒级同步能力,则保证全身关节像共用同一个节拍器一样协同运动。
3. 下层“末梢神经”:驱动器 + 边缘控制网络
再往下,则是具体执行动作的驱动器与传感器网络。
其中:
- 腿部、躯干等核心大关节→ 通过 EtherCAT 接入实时控制主干
- 手指、颈部等低速自由度→ 则可能采用 CAN/CAN-FD 降低成本与布线复杂度
每个关节驱动器内部,还会完成本地闭环控制:
- 实时调节位置
- 控制电流
- 修正力矩输出
- 回传状态数据
一旦机器人重心发生偏移,中层控制器就会立刻修正下一帧动作,从而保持动态平衡。
4. 一个动作是如何完成的?
以“起身并开始行走”为例,整个链路大致如下:
(1)上层AI 感知环境,生成“起身、向前行走”的行为意图
(2)中层运动控制器将动作拆解成多关节轨迹
(3)EtherCAT 主干同步下发控制指令
(4)各关节驱动器本地闭环执行并实时反馈状态
(5)控制器根据反馈持续修正下一周期动作
整个过程会以毫秒甚至微秒级节奏持续循环。
这也是为什么人形机器人能够做到:
- 稳定行走
- 动态平衡
- 实时纠偏
- 多关节同步发力
六、 行业现状:主流机器人如何选总线
厂商 | 总线方案 | 核心特点 |
|---|---|---|
优必选Walker | EtherCAT 为主干,CAN / RS-485 为分支 | 以EtherCAT 构建主干通信骨架,自研实时控制系统原生适配;同步支持CAN / RS-485 分支,实现全身多关节高精度协同。 |
Figure AI | EtherCAT(含 FSoE 安全协议) | 深度嫁接工业EtherCAT 生态,采用 FailSafe over EtherCAT(FSoE)安全协议;既支撑工业落地场景,又保障人机协作安全可靠。 |
智元机器人 | EtherCAT + CAN FD(通过 DCU 桥接) | 主干EtherCAT 下通过 DCU 模块桥接 CAN FD 执行器;主站下发指令经过DCU 转换,实现中央大脑对执行器的微秒级实时控制。 |
波士顿动力Atlas | 高实时以太网工业总线(业界推测) | 模块化分布式架构,高实时工业总线(以太网技术);四肢可配置专用处理单元,支持超高动态运动与极速姿态控制。 |
特斯拉Optimus | 以太网+ EtherCAT + 混合总线架构(业界推演) | 高低速总线分层组网;在灵巧手等高精密部位使用千兆以太网替代CAN FD,支撑高带宽触觉感知与神经控制,同时降低线束重量。 |
七、下一代总线展望
1. I3C 总线:嵌入式传感器互联的现代总线 I3C(Improved InterIntegrated Circuit)是 MIPI 联盟制定的两线串行总线协议,是 I²C 的升级版,支持更高数据率、动态寻址和 In-Band Interrupt,可显著降低布线复杂度、提高带宽效率。
它已在智能终端、嵌入式传感器互联等领域获得实际应用,成为连接大量外设与传感模块的高性价比方案。
尽管如此,在高动态、多节点的工业机器人通信场景中,I3C 的应用还主要处于探索和生态培育阶段。
2.AUTBUS(国产工业总线):高速带宽与实时性兼备 AUTBUS 是我国主导发展的高速工业现场总线标准,基于时间敏感网络(TSN)和 IPv6 技术,具备高带宽、确定性实时传输、灵活布线和抗干扰等特性,适配工业控制及多节点大数据场景。
相关国家标准和产业组织已发布和成立,并在智能制造、工业自动化、轨道交通等多个领域开始推广。
部分企业提出将AUTBUS 技术应用于机器人高实时通信场景的解决方案,但整体生态仍在发展,为未来机器人及工业系统提供国产自主可控的通信基础。
八、 结语
从EtherCAT 到 CAN/CANFD,从灵巧手专用 I3C 到国产自主 AUTBUS,藏在人形机器人机身里的通信总线,正是支撑它动作精准、行走稳当、感知灵敏的核心神经系统。
高端人形机器人的能力上限,从来不只靠AI 大脑做智能决策,更依托分层异构的混合总线架构,实现上层感知决策与底层肢体动作的无缝协同:
- 高实时主干总线,扛起躯干、四肢核心关节,保障微秒级同步、动作精准不乱拍;
- 边缘低速总线,承接手指、头部等末梢自由度与辅助外设,兼顾成本与实用性;
- I3C、AUTBUS 等新一代总线,则为未来灵巧手小型化、高密度传感器组网、国产工业生态自主可控,埋下了技术伏笔。
往后再看人形机器人平稳行走、灵活起舞、完成高动态动作时,不妨多一层理解:每一次微秒级的指令传输,每一次全身关节的同步律动,背后都是这套看不见、却一刻不停运转的通信神经系统在默默支撑。
读懂了总线,才算真正看懂具身智能的底层根基:让机器人想得快、动得准的,从来不止是AI 大脑,更是这套分层分工、精密协作、隐形却至关重要的机器人神经网络。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-05-15,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号