【Linux内核模块】模块参数详解

【Linux内核模块】模块参数详解

byte轻骑兵
发布于 2026-01-21 19:32:26
发布于 2026-01-21 19:32:26
玩过智能家居的朋友都知道,一盏智能灯通常有亮度调节、色温切换的功能 —— 这些可调节的选项让设备更灵活。其实 Linux 内核模块也有类似的调节旋钮,今天要聊的模块参数。它能让你在加载模块时动态配置参数,不用改代码就能实现功能切换,堪称模块开发的效率神器。
一、什么是模块参数?
1.1 给模块装个控制面板
模块参数本质上是可以在加载模块时传递给模块的变量,就像你给电器插电时,可以通过遥控器先设置好亮度、模式再开机。比如:
- 调试开关:加载时指定debug=1打开详细日志
- 缓冲区大小:通过buf_size=4096设置内存分配大小
- 设备名称:用dev_name="mydevice"自定义设备节点名称
没有模块参数的话,要改这些配置就得重新编译模块,效率极低。有了它,一行命令就能搞定配置,这也是内核模块灵活性的重要体现。
1.2 模块参数的三大特性
- 动态配置:不需要重新编译模块,加载时通过命令行传递参数
- 类型安全:支持整数、字符串、布尔值等多种类型,内核会自动校验
- 权限可控:可以设置参数是否允许用户态读写(比如只允许 root 修改)
1.3 直观对比:有参数 vs 无参数
场景 | 无模块参数 | 有模块参数 |
|---|---|---|
改调试开关 | 修改代码#define DEBUG 1→重新编译 | 加载时insmod demo.ko debug=1 |
调整缓冲区大小 | 修改#define BUF_SIZE 1024→编译 | 加载时insmod demo.ko buf_size=2048 |
切换设备名称 | 改代码中字符串→编译 | 加载时insmod demo.ko name="test" |
二、模块参数的三要素:定义、声明、使用
要使用模块参数,必须掌握三个核心步骤:定义变量→声明参数→在代码中使用。
2.1 第一步:包含头文件
模块参数的所有宏定义都在linux/moduleparam.h中,所以必须先包含这个头文件:
#include <linux/moduleparam.h>少了它,编译器会报module_param未定义的错误,这是新手最容易踩的坑。
2.2 第二步:定义变量
先定义一个普通的全局变量(通常用static修饰,避免符号冲突):
// 整数类型
static int debug_level = 0; // 默认关闭调试
// 字符串类型
static char *device_name = "default_dev"; // 默认设备名
// 布尔类型
static bool enable_log = false; // 默认不启用日志这些变量就是参数的载体,默认值会在没有传递参数时生效。
2.3 第三步:用module_param声明参数
通过module_param宏把变量声明为模块参数,格式如下:
module_param(变量名, 类型, 权限);- 变量名:要暴露为参数的变量(必须和上面定义的变量名一致)
- 类型:参数的数据类型(支持 int、charp、bool 等)
- 权限:参数在/sys/module下对应的文件权限(如 0644)
常用类型对照表
类型标识 | 对应 C 语言类型 | 示例值 | 说明 |
|---|---|---|---|
int | int | 123 | 有符号整数 |
uint | unsigned int | 456 | 无符号整数 |
long | long | 100000 | 长整数 |
charp | char * | "hello" | 字符串指针(内核会自动分配内存) |
bool | bool | 1或0 | 布尔值(1 为真,0 为假) |
invbool | bool | 1或0 | 反向布尔值(1 为假,0 为真) |
权限参数说明:
权限用八进制数字表示,控制/sys/module/<模块名>/parameters/<参数名>文件的访问权限:
- S_IRUSR:用户可读(4)
- S_IWUSR:用户可写(2)
- S_IRGRP:组可读(1)
- 通常用组合权限,如S_IRUGO(所有人可读)、S_IRUSR|S_IWUSR(用户可读写)
注意:权限不能包含执行权限(如S_IXUSR),内核会忽略执行权限位。
2.4 完整示例:定义和声明参数
#include <linux/module.h>
#include <linux/init.h>
#include <linux/moduleparam.h>
// 1. 定义变量
static int debug = 0; // 整数参数,默认0
static char *dev_name = "uart";// 字符串参数,默认"uart"
static bool enable = false; // 布尔参数,默认false
static int arr[5]; // 数组参数
static int arr_len; // 实际传入的数组元素个数
// 2. 声明参数
module_param(debug, int, S_IRUGO); // 所有人可读
module_param(dev_name, charp, S_IRUSR|S_IWUSR); // 用户可读写
module_param(enable, bool, S_IRUGO|S_IWUSR); // 用户可读写,组和其他人可读
module_param_array(arr, int, &arr_len, S_IRUGO); // 数组参数
// 3. 添加参数描述(可选但推荐)
MODULE_PARM_DESC(debug, "Debug level (0-3), default 0");
MODULE_PARM_DESC(dev_name, "Device name, default 'uart'");
MODULE_PARM_DESC(enable, "Enable feature flag (0/1), default 0");
MODULE_PARM_DESC(arr, "Integer array, max 5 elements");三、数组参数:一次传递多个值
有时候需要传递多个同类型参数(比如 IP 地址列表、端口号数组),这时候就需要数组参数。
3.1 数组参数的声明方式
module_param_array(数组名, 元素类型, 长度指针, 权限);- 数组名:要作为参数的数组变量
- 元素类型:和单个参数类型一致(如 int、uint)
- 长度指针:用于接收实际传入的元素个数(可以为 NULL,表示不关心长度)
- 权限:同普通参数
3.2 数组参数的使用示例
static int ports[5]; // 最多存5个端口号
static int port_count; // 实际传入的端口数量
module_param_array(ports, int, &port_count, S_IRUGO);
MODULE_PARM_DESC(ports, "List of ports (max 5 elements)");
// 在代码中使用
static int __init demo_init(void) {
int i;
printk("传入了%d个端口号:", port_count);
for (i = 0; i < port_count; i++) {
printk("%d ", ports[i]);
}
return 0;
}加载时传递数组参数的格式是参数名 = 值 1, 值 2, 值 3:
sudo insmod demo.ko ports=80,443,8080内核会自动把这三个值存入ports数组,port_count会被设为 3。
3.3 数组参数的注意事项
- 数组大小固定,传入元素超过数组长度会被截断(比如数组大小 5,传入 6 个元素,只保留前 5 个)
- 必须用逗号分隔元素,不能有空格(命令行中空格会被解析为新参数)
- 如果不传递数组参数,port_count会被设为 0,数组元素保持默认值
四、布尔参数:开关控制的最佳选择
布尔参数专门用于开关控制,使用简单但有细节需要注意。
4.1 普通布尔值(bool)
static bool enable = false;
module_param(enable, bool, S_IRUGO);加载时传递:
- enable=1或enable=y或enable=yes都会把enable设为true
- enable=0或enable=n或enable=no都会设为false
4.2 反向布尔值(invbool)
invbool是反向布尔值,传递1会被解析为false,0会被解析为true,适合禁用类参数:
static bool disable_check = false;
module_param(disable_check, invbool, S_IRUGO);- 传递disable_check=1 → 实际值为false(即不禁用检查)
- 传递disable_check=0 → 实际值为true(即禁用检查)
这种类型适合表达禁止某功能,比普通布尔值更直观。
五、参数的访问与修改:不止于加载时
模块参数不仅能在加载时设置,加载后还能通过/sys文件系统查看和修改(取决于权限设置)。
5.1 /sys文件系统中的参数接口
加载模块后,内核会在/sys/module/<模块名>/parameters/目录下创建参数文件:
# 查看参数文件
ls /sys/module/demo/parameters/
debug dev_name enable ports
# 查看参数值
cat /sys/module/demo/parameters/debug
0
# 修改参数值(需要权限)
sudo echo 1 > /sys/module/demo/parameters/debug5.2 动态修改参数的注意事项
- 只有权限包含S_IWUSR(用户可写)的参数才能被修改
- 修改字符串参数时,新字符串长度不能超过原缓冲区大小(否则会被截断)
- 动态修改后,模块中访问该变量会得到新值,但需要注意并发安全(多线程访问时加锁)
5.3 何时需要动态修改参数?
- 调试过程中临时打开日志输出
- 动态调整缓冲区阈值
- 在线切换功能模式(如从性能模式切到节能模式)
但要注意:核心参数(如设备号)不建议动态修改,可能导致模块状态混乱。
六、模块参数的工作原理:内核是如何处理参数的?
知道了怎么用,再了解下底层原理,好地理解参数机制。
1. 加载时的参数解析流程
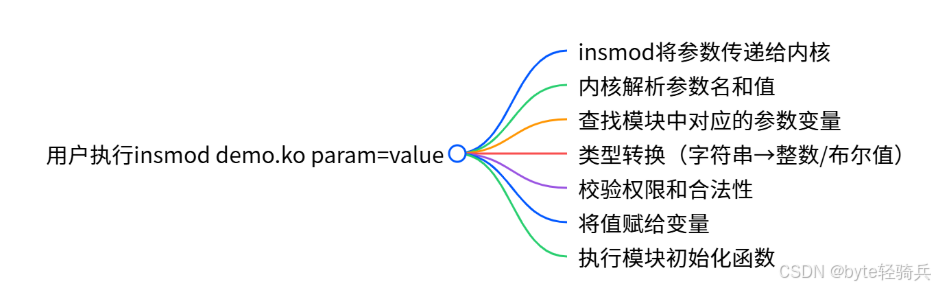
2. 参数存储位置
模块参数本质是模块的全局变量,内核通过符号表找到变量地址,直接修改内存中的值。这也是为什么参数必须是全局变量(static全局也可以,只要在模块内可见)。
3. 类型校验机制
内核会对参数类型进行严格校验,比如给整数参数传递字符串会报错:
insmod: ERROR: could not insert module demo.ko: Invalid parameters查看dmesg会看到详细错误:
demo: 'abc' invalid for parameter 'debug'这种机制避免了类型错误导致的模块崩溃。
七、实战示例:带参数的完整模块
咱们写一个包含多种参数类型的完整模块,演示参数的定义、使用和动态修改。
1. 代码实现(param_demo.c)
#include <linux/module.h>
#include <linux/init.h>
#include <linux/moduleparam.h>
#include <linux/kernel.h>
// 定义参数变量
static int debug = 0;
static char *dev_name = "ttyUSB0";
static bool enable_log = false;
static int baud_rates[3] = {9600, 19200, 38400};
static int baud_count;
static bool disable_crc __initdata = false; // 初始化阶段参数
// 声明参数
module_param(debug, int, S_IRUGO | S_IWUSR);
module_param(dev_name, charp, S_IRUSR | S_IWUSR);
module_param(enable_log, bool, S_IRUGO);
module_param_array(baud_rates, int, &baud_count, S_IRUGO);
module_param(disable_crc, invbool, S_IRUGO);
// 参数描述
MODULE_PARM_DESC(debug, "调试级别(0-3,默认0)");
MODULE_PARM_DESC(dev_name, "设备名称(默认ttyUSB0)");
MODULE_PARM_DESC(enable_log, "是否启用日志(0/1,默认0)");
MODULE_PARM_DESC(baud_rates, "波特率列表(最多3个值)");
MODULE_PARM_DESC(disable_crc, "是否禁用CRC校验(默认不禁用)");
// 初始化函数
static int __init param_demo_init(void) {
int i;
printk(KERN_INFO "===== 参数演示模块加载 =====");
printk(KERN_INFO "debug = %d", debug);
printk(KERN_INFO "dev_name = %s", dev_name);
printk(KERN_INFO "enable_log = %s", enable_log ? "开启" : "关闭");
printk(KERN_INFO "波特率列表(共%d个):", baud_count);
for (i = 0; i < baud_count; i++) {
printk(KERN_INFO " %d", baud_rates[i]);
}
printk(KERN_INFO "CRC校验:%s", disable_crc ? "已禁用" : "启用中");
return 0;
}
// 退出函数
static void __exit param_demo_exit(void) {
printk(KERN_INFO "参数演示模块卸载完成");
}
module_init(param_demo_init);
module_exit(param_demo_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("byte轻骑兵");
MODULE_DESCRIPTION("模块参数演示模块");2. 编译 Makefile
obj-m += param_demo.o
KERNELDIR ?= /lib/modules/$(shell uname -r)/build
PWD := $(shell pwd)
default:
$(MAKE) -C $(KERNELDIR) M=$(PWD) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(PWD) clean3. 加载模块并测试参数
# 编译模块
make
# 加载模块并传递参数
sudo insmod param_demo.ko debug=2 dev_name="myuart" enable_log=1 baud_rates=9600,115200 disable_crc=0
# 查看输出日志
dmesg | tail -10会看到初始化函数打印出传递的参数值:
===== 参数演示模块加载 =====
debug = 2
dev_name = myuart
enable_log = 开启
波特率列表(共2个):
9600
115200
CRC校验:启用中4. 动态修改参数
# 查看当前debug值
cat /sys/module/param_demo/parameters/debug
2
# 修改debug值为3
sudo echo 3 > /sys/module/param_demo/parameters/debug
# 再次查看(需要模块中读取该变量才能看到变化)
cat /sys/module/param_demo/parameters/debug
3八、常见问题与解决方案
8.1 参数传递失败,提示Invalid parameters
可能原因:
- 参数名拼写错误(内核找不到对应变量)
- 参数类型不匹配(如给整数参数传字符串)
- 数组参数格式错误(用了空格分隔而不是逗号)
解决方法:
- 检查参数名是否和代码中module_param的第一个参数一致
- 确认参数类型匹配(字符串参数用charp,整数用int)
- 数组参数用逗号分隔,如arr=1,2,3
8.2 动态修改参数时提示Permission denied
原因:模块参数声明时的权限不包含写权限(如只设了S_IRUGO)。
解决:重新编译模块,将权限改为S_IRUGO | S_IWUSR(允许用户读写)。
8.3 传递字符串参数包含空格怎么办?
命令行中空格会被解析为参数分隔符,要传递含空格的字符串需用引号包裹:
sudo insmod demo.ko dev_name='my device'注意必须用单引号(双引号在 shell 中可能被提前解析)。
8.4 模块参数可以是局部变量吗?
绝对不行!模块参数必须是全局变量(或static全局变量),因为内核需要在模块初始化前找到变量地址并赋值。局部变量在函数执行时才分配内存,内核无法访问。
九、模块参数的最佳实践
1. 始终提供默认值
给参数设置合理的默认值,确保即使不传递参数,模块也能正常工作。比如:
static int timeout = 500; // 默认超时时间500ms2. 限制参数取值范围
在初始化函数中检查参数合法性,避免无效值导致问题:
static int debug;
module_param(debug, int, S_IRUGO);
static int __init demo_init(void) {
if (debug < 0 || debug > 3) {
printk(KERN_ERR "debug值必须在0-3之间,已重置为0");
debug = 0;
}
// ...
}3. 敏感参数限制权限
涉及安全或性能的参数,应限制为 root 可写:
static int max_connections;
module_param(max_connections, int, S_IRUGO | S_IWUSR); // 只有root能修改4. 用MODULE_PARM_DESC添加描述
每个参数都应该用MODULE_PARM_DESC说明用途和取值范围,方便其他开发者使用:
MODULE_PARM_DESC(timeout, "超时时间(ms),范围100-1000,默认500");这样modinfo命令能显示参数说明:
modinfo param_demo.ko | grep parm
parm: debug:调试级别(0-3,默认0)(int)
parm: dev_name:设备名称(默认ttyUSB0)(charp)模块参数看似简单,却体现了 Linux 内核灵活配置的设计哲学。它的核心价值在于:
- 提升开发效率:不用反复编译就能测试不同配置
- 增强模块通用性:同一模块可通过参数适配不同场景
- 简化调试过程:动态开关日志,无需重启系统
- 优化用户体验:管理员可根据需求调整模块行为
掌握模块参数不仅是模块开发的基础技能,更是理解内核动态配置机制的关键。
最后留个小问题:如果需要传递 IP 地址这类复杂参数,该如何实现?提示:可以用字符串参数接收,再在模块中解析为in_addr结构。欢迎在评论区分享你的实现思路!
本文参与 腾讯云自媒体同步曝光计划,分享自作者个人站点/博客。
原始发表:2025-07-18,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号