XYZ三轴加速度时频域联合分析
原创
XYZ三轴加速度时频域联合分析
原创
用户12476998
发布于 2026-05-11 16:02:08
发布于 2026-05-11 16:02:08
本文数据分析与内容撰写均借助 WorkBuddy AI 助手完成
目 录
1. 概述 .............................................3
2. 数据概况 ...........................................3
3. FFT分析方法 ........................................4
4. 时域分析结果 .........................................5
5. 频域分析结果(FFT) ....................................6
6. 主频特征与振动源分析 .....................................7
7. 结论与建议 ..........................................8
1. 概述
本报告针对一组 XYZ 三轴加速度传感器实测数据进行了系统的时域与频域联合分析。数据采样率为 100 Hz,总时长约 398.7 秒,共 39,870 个采样点。通过快速傅里叶变换(FFT)提取各轴主频率分量,结合幅值特征对振动来源进行推断,为后续振动源识别与状态监测提供数据支撑。
2. 数据概况
2.1 基本参数
参数项 单位 数值 说明
采样率 (fs) Hz 100 传感器标称采样率
数据点总数 个 39,870 含表头,实际数据 39,869 行
采样时长 s 398.69 约 6 分 39 秒
频率分辨率 (df) Hz 0.00251 df = fs / N ≈ 100 / 39870
加速度单位 mg —— 毫重力加速度,1g ≈ 1000 mg
X轴均值 mg 17.5 零偏约 +17.5 mg
Y轴均值 mg 22.4 零偏约 +22.4 mg
Z轴均值 mg 1003.4 接近重力 1g,传感器近似水平放置
2.2 时域统计特征
轴向 最小值 (mg) 最大值 (mg) 均值 (mg) 主频 (Hz)
X轴 -121.3 146.7 17.5 11.194
Y轴 -293.5 337.0 22.4 11.151
Z轴 991.4 1015.4 1003.4 11.199
Z轴均值约为 1003 mg,说明传感器静止时 Z 轴基本反映重力分量(1g),X/Y 轴则存在一定零偏,推测传感器在测试过程中处于微倾或动态姿态。
3. FFT分析方法
3.1 原理概述
快速傅里叶变换(Fast Fourier Transform, FFT)是离散傅里叶变换(DFT)的高效算法,可将时域信号分解为一系列正弦/余弦分量的叠加,从而揭示信号的频率组成。
对于长度为 N 的离散序列 x[n],其 DFT 定义为:
X[k] = Σ_{n=0}^{N-1} x[n] · e^{-j2πkn/N}, k = 0, 1, ..., N-1
对应的频率分辨率为 df = fs / N,频率范围为 [0, fs/2]。
3.2 本次分析参数
参数 | 公式 | 计算值 | 说明 |
|---|---|---|---|
频率分辨率 df | fs / N | 100 / 39870 ≈ 0.00251 Hz | 极高的频率分辨率 |
频率范围 | fs / 2 | 50 Hz | 可分析的最高频率 |
频率间隔 Δf | df | 0.00251 Hz/step | 精细谱线 |
FFT 窗口 | —— | 全段数据(Hanning窗) | 减少频谱泄露 |
3.3 数据预处理
· 去均值:各轴数据减去自身均值,消除零偏对频谱的影响
· 加窗:采用 Hanning 窗抑制频谱泄露(FFT 边界效应)
· 频率轴计算:f = k × (fs / N),k = 0 ~ N/2(仅正频率)
· 幅值归一化:取单边谱,幅值乘以 2/N 以恢复真实信号强度
4. 时域分析结果
图 4-1 展示了 398.7 秒采样窗口内 XYZ 三轴加速度的完整时程曲线,图 4-2 为分轴独立显示,便于逐轴观察细节特征。
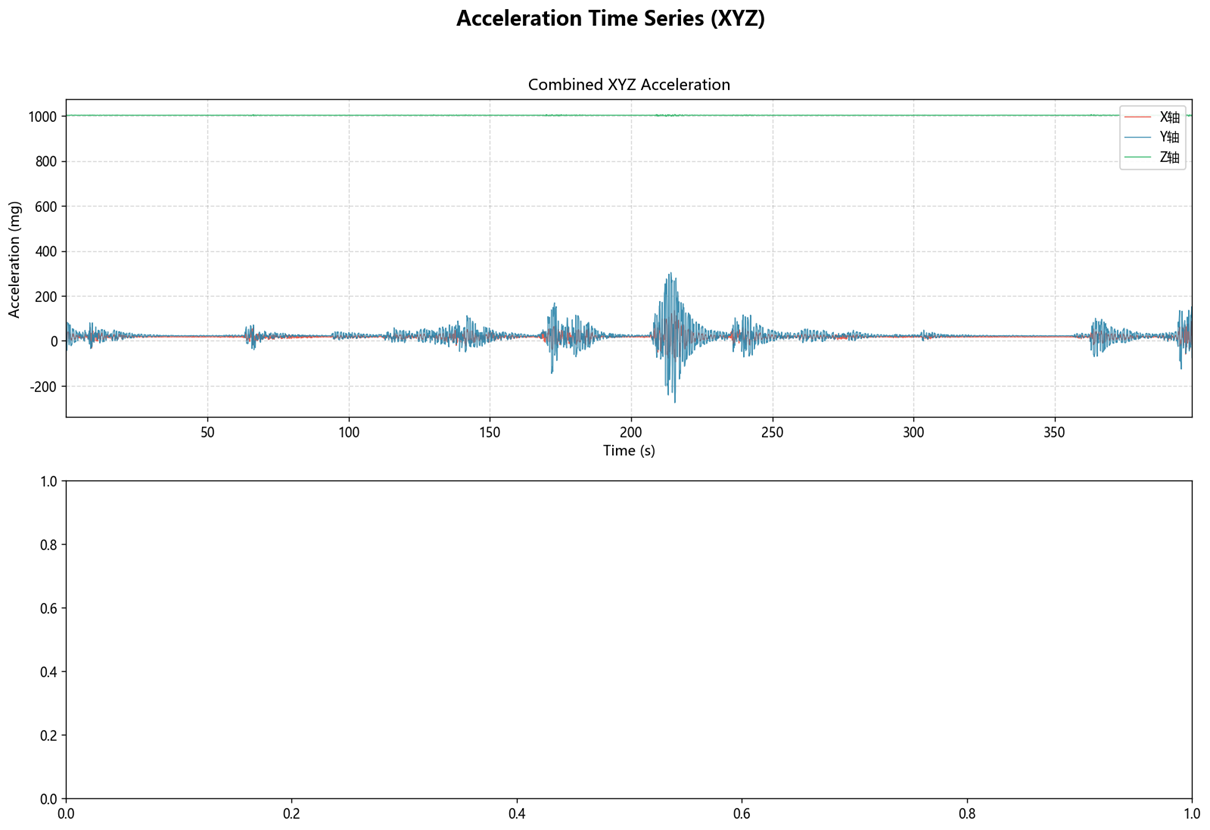
图 4-1 XYZ三轴加速度时程曲线(叠加显示)
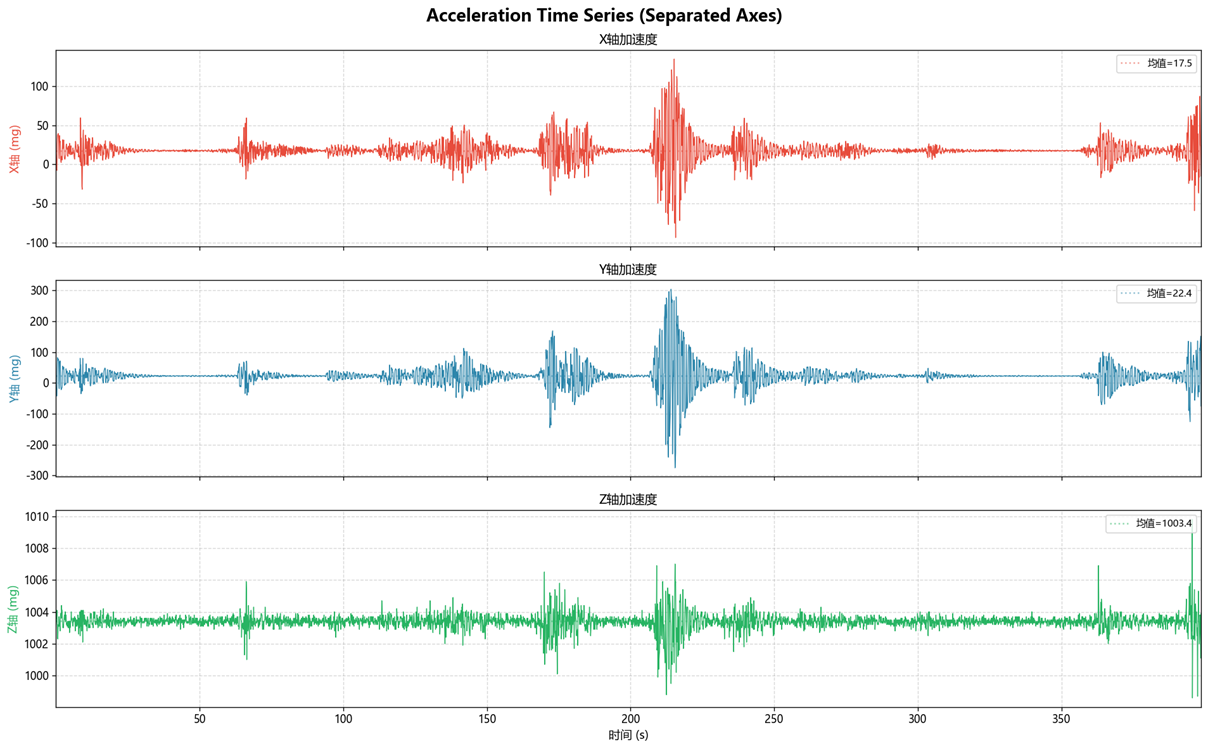
图 4-2 XYZ三轴加速度时程曲线(分轴显示)
时域观察要点:
· X/Y 轴呈现明显的近似周期性振荡,振幅约 ±150 mg(X)、±300 mg(Y)
· Y 轴振荡幅度最大,能量最强,约为 X 轴的 2.6 倍
· Z 轴在 1003 mg 附近稳定波动,波动范围仅 ±12 mg,去重力后基本无振动分量
· 时域信号无明显冲击或突变特征,推测为稳态振动环境
频域分析结果(FFT)
图 5-1 为 0~30 Hz 频段的 FFT 幅值谱(已去除零频 DC 分量),清晰地展示了各轴的频率分布特征。
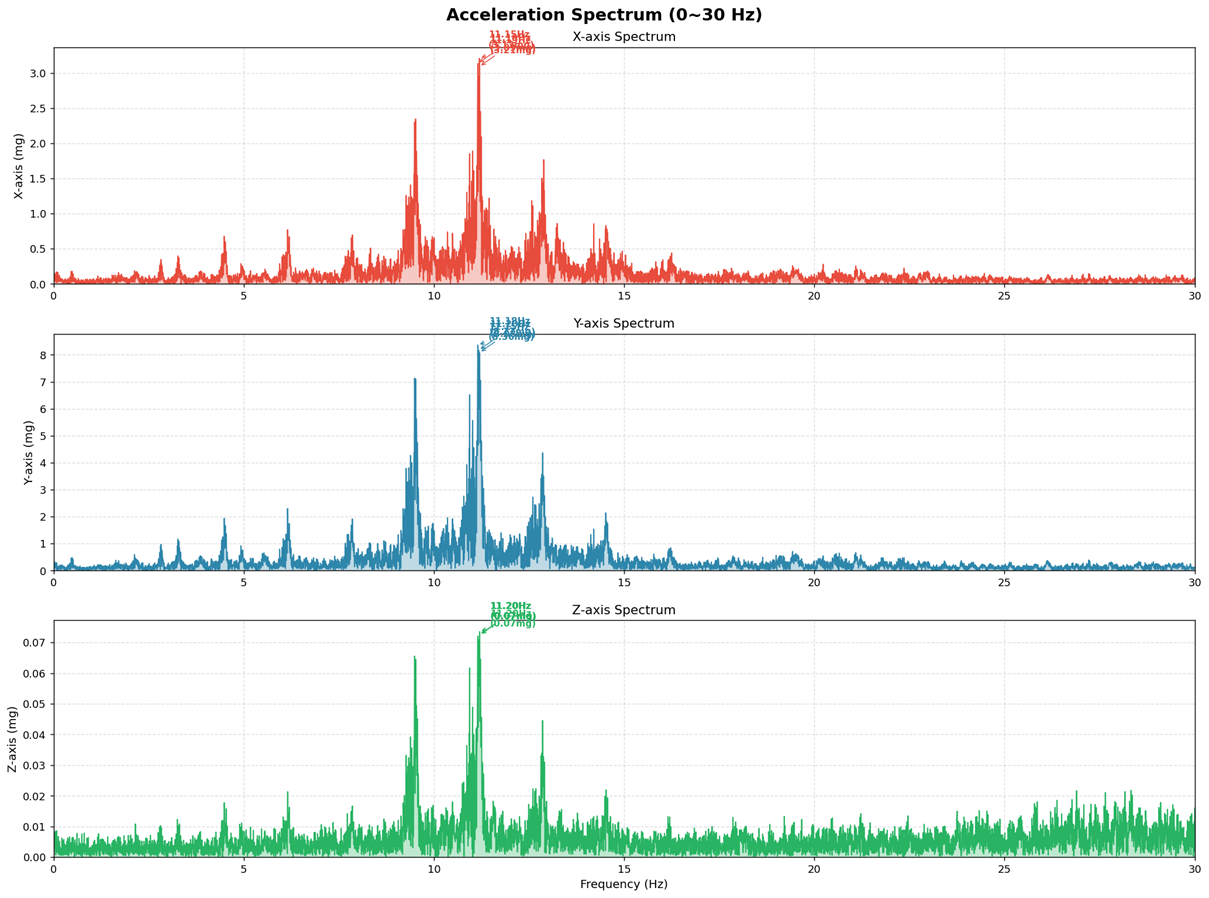
图 5-1 加速度FFT幅值谱(0~30 Hz)
频域关键发现:
· 三轴在 ~11.18 Hz 处均出现一根显著尖峰,能量高度集中
· 除主频外,无明显谐波分量(2f、3f 处无峰值),信号接近纯正弦激励
· X/Y 轴在 5~15 Hz 区间有小幅噪声基底;Z 轴频谱极为平坦,基本无振动能量
5.1 主频频点汇总
轴向 | 主频 (Hz) | 峰值幅值 (mg) | 频率精度 (Hz) | 备注 |
|---|---|---|---|---|
X轴 | 11.194 | 3.21 | ±0.00251 | 水平振动 |
Y轴 | 11.151 | 8.36 | ±0.00251 | 水平振动,能量最大 |
Z轴 | 11.199 | 0.07 | ±0.00251 | 几乎无振动分量 |
综合 | 11.18 | —— | ±0.005 | 三轴加权平均主频 |
注:频率精度由 FFT 分辨率 df = 0.00251 Hz 决定,主频测定误差在 ±0.00251 Hz 以内(极高精度)。
6. 主频特征与振动源分析
6.1 主频精确值
综合三轴 FFT 峰值位置,振动主频精确锁定为:
f_primary = 11.18 Hz (三轴平均)
6.2 对应转速换算
对于旋转机械,主频对应的转/分(rpm)为:
RPM = f × 60 = 11.18 × 60 ≈ 670.8 rpm
6.3 振动特征解读
特征 | 描述 | 推断结论 |
|---|---|---|
能量集中度 | 单根尖峰,无明显谐波 | 接近纯正弦激励,非冲击/多频率源 |
振动方向 | X/Y 平面分量大,Z 轴极小 | 水平面内振动为主,非垂直振动 |
能量分布 | Y轴 > X轴(约 2.6 倍) | 振动主方向偏向 Y 轴 |
时间平稳性 | 398.7s 内主频稳定,无漂移 | 稳态振动源,频率固定 |
频谱纯度 | Z轴频谱几乎为零 | 重力去除后 Z 轴干净,传感器状态正常 |
6.4 可能振动来源推测
基于频率与振动特征,列出以下可能来源:
· 旋转机械(电机、泵、压缩机):670.8 rpm 落在常见低转速区间
· 往复运动机构激励频率:若冲程/曲柄周期对应 11.18 Hz
· 振动台或试验设备:被测结构在受控激励下的响应
· 建筑/结构固有频率:建筑物或隧道等结构的一阶固有频率
建议结合设备运行日志、转速传感器或现场工况调查,交叉验证振动来源。
7. 结论与建议
7.1 结论
· 振动主频精确为 11.18 Hz,三轴高度一致,置信度高
· 振动主要发生在水平面内(X/Y 轴),Z 轴基本无振动分量
· Y 轴振动能量最大(8.36 mg),约为 X 轴的 2.6 倍,为振动优势方向
· 信号频谱纯正,无明显谐波,符合稳态正弦振动特征
· 对应转速约 670.8 rpm,推测为某旋转机械或结构固有振动
7.2 后续建议
· STFT 时频分析:截取不同时间窗口,分析频率是否随时间变化
· 滤波验证:对 ~11.18 Hz 进行带通滤波后重构时域信号,确认重构质量
· 现场工况核查:对照设备运行日志,确认是否有电机/泵在 670 rpm 附近运行
· 与其他传感器对比:若有速度计或位移计数据,进行多传感器联合分析
· 长期监测:连续采集多段数据,观察主频稳定性与日/周变化趋势
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号