空地协同让电力巡检更智能 ——从人工攀爬到立体监测的技术演进
原创
空地协同让电力巡检更智能 ——从人工攀爬到立体监测的技术演进
原创
思通数科
发布于 2026-02-24 14:00:05
发布于 2026-02-24 14:00:05
电力巡检这活儿,说起来都是泪。
以前跟着老师傅爬过几次塔,三十多米高,风一吹晃晃悠悠的,脚底下就是几十万伏的线路。那时候就在想,这活儿能不能不让兄弟们拿命去干?
后来做了几年技术,接触了不少巡检系统,也踩过不少坑。今天聊聊我们最近在搞的一套东西,不是啥高大上的概念,就是把无人机和工程车凑一块儿,让它们自己跑、自己看、自己报。
天上飞的这部分
大疆的无人机,司空2的平台,这俩配合得还行。
关键是把航线规划这事儿给捋顺了。以前飞无人机全看飞手手艺,飞得好不好全凭手感。现在用RTK定位,厘米级的精度,杆塔在哪儿、绝缘子在哪儿,飞机自己知道。沿着线路飞一圈,每个角度拍几张,数据就回来了。
摄像头这块用的是20倍变焦的,50米外能看清绝缘子串上的裂纹。以前爬上去才能看到的活儿,现在站在山脚下就干了。云台是三轴增稳的,六级风以下画面都稳得住,不至于一帧一帧抖成PPT。
数据回传走了两条路:有网的时候4G/5G实时传,没网的时候本地存着,等信号恢复了再续传。这功能看着简单,真到了山里就知道多救命——很多地方压根就没信号。

地上跑的这部分
工程车顶上装了个云台摄像头,409万像素,120dB宽动态。啥概念?就是大太阳底下能看清电缆沟里的细节,隧道里不开灯也能凑合看。
车上塞了块NVIDIA Jetson AGX Orin,巴掌大的板子,算力275个TOPS。这么说吧,同时跑四路视频做检测,延迟压到30毫秒以内,足够用了。
定位模块是北斗+GPS双模的,拍完一张图,地理坐标直接就打在照片上。后来查问题的时候,点开图片就能看到是哪个桩、哪段线路,不用再去翻飞行记录。

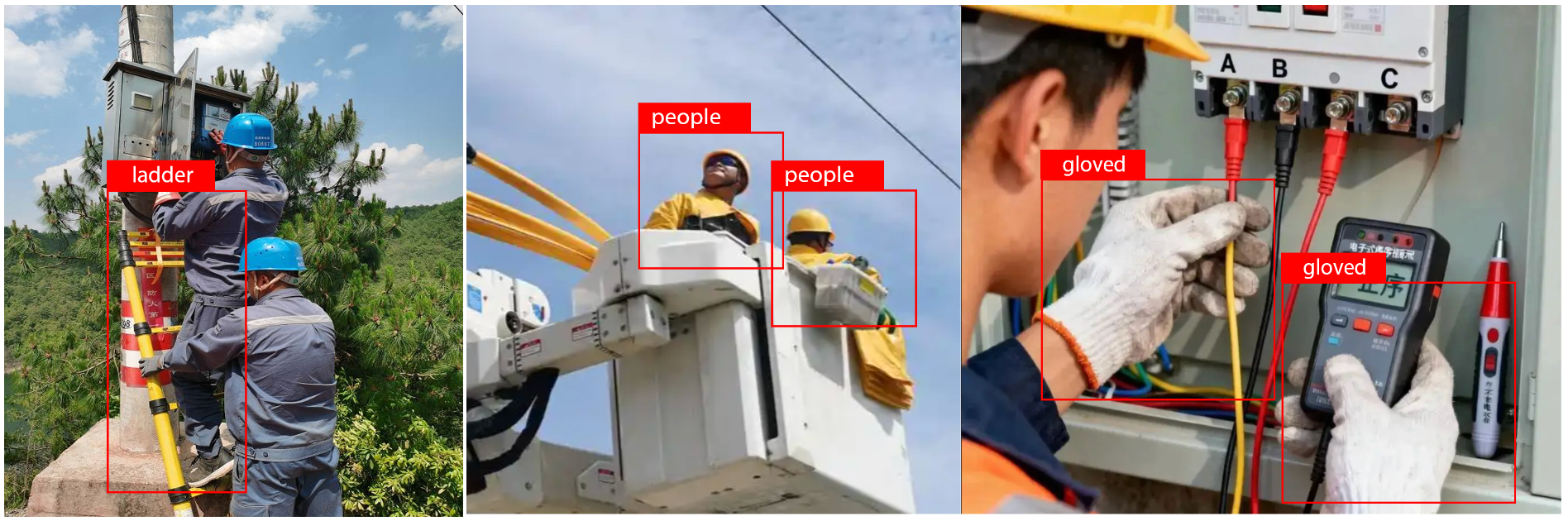
让机器自己看东西
这套系统最核心的部分,其实是让机器学会看那些隐患。
我们攒了个数据集,五十多万张标注好的图片,都是这几年跑现场攒的。绝缘子自爆、鸟巢、异物挂线、接地锈蚀、线夹发热——常见的二十几类缺陷都覆盖了。
模型用的是YOLOv8,加了注意力机制,专门对付那些小目标。啥叫小目标?就是500米外的一个风筝挂在线路上,在画面里就几个像素点。人眼扫过去根本看不见,但模型能认出来。
为了让模型跑得快,做了INT8量化,模型体积压缩到原来的四分之一,精度掉了不到5%,推理速度快了两倍多。工程车上跑起来,一秒钟能处理三十多帧,足够实时响应了。
有个小细节:车速快的时候抽帧密一些,车速慢的时候就少抽点,保证每两米至少检测一帧。这样不管快跑慢跑,都不会漏掉该看的地方。
发热检测这块,接了红外摄像头,温度阈值设好,发现哪块温度异常就报警。以前拿红外热像仪人工扫,一天扫不了几公里,现在车开过去全自动。
没网的时候咋整
电力巡检最大的坑就是信号覆盖。深山老林、跨江跨海的地方,网络基本靠运气。
我们的处理方式是:本地先算,算完再传。
边缘设备上跑着整套检测模型,实时分析视频流。发现异常之后,关键帧存下来,加上检测结果,一起暂存在1TB的SSD里。同时通过局域网广播给现场的平板和手机,让作业的人第一时间知道情况。
等车开出盲区,网络恢复了,系统自动把没传完的数据补上去。断点续传、文件校验都做了,不会丢数据也不会传错。
这套机制看着简单,但解决了大问题——不用非得等到有信号的地方才能干活,也不用担心数据白跑一趟。
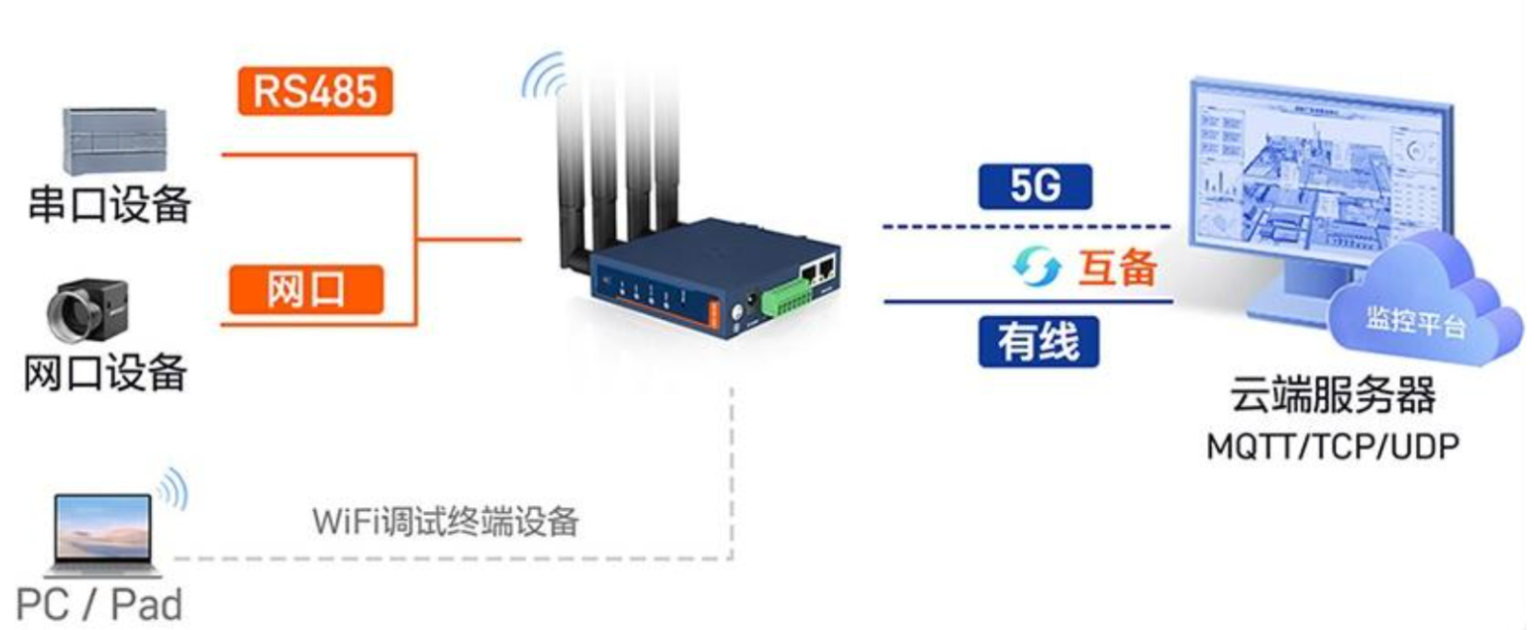
通信这块怎么搭
工程车主通信是华为的5G工业路由器,双模组网,2Gbps的理论速率。无人机用公网4G/5G,配了2.4G和5.8G的双频数传做备份,开阔地能撑15公里。
现场的人连WiFi 6局域网,延迟几毫秒,看实时画面、收检测结果都很流畅。
数据流做了分层:预览流720p,2Mbps,实时上传给后台的人看情况;原始流4K,20Mbps,本地存着,只传关键帧和检测结果。这样带宽占得少,远程指挥的人也能看到实时画面。
消息传输用的MQTT协议,轻量、实时性好。图像文件走的HTTPS,保证传输安全。这些都是成熟方案,稳定可靠。
后台怎么管这些数据
后台拆成了几个微服务:设备管理、任务调度、AI分析、告警处理、数据归档,各自独立部署。哪天访问量大了,哪个服务扛不住就扩容哪个,不用全盘重来。
实时状态和最新告警放Redis里,查得快。业务数据放MySQL集群,图片放MinIO对象存储,各司其职。
数据流走了Kafka消息队列。边缘节点把检测结果推过来,先排队再处理,不怕突发流量把系统冲垮。告警去重、聚合、优先级排序都在流处理引擎里做,比如同一位置连续出现三次异物告警,就自动升级成紧急事件。
所有原始视频、检测结果、设备日志都打包存着,默认保留90天。哪天想翻旧账,随时能调出来。
业务闭环怎么走
告警生成了,系统自动关联这台设备的历史数据和台账信息,生成一个完整的工单——位置、类型、现场图片全都有。工单状态实时同步到现场人员的终端上,修没修、什么时候修的,后台都看得见。
整改完了,现场人员拍张复查照片传上来,系统自动比对整改前后的图像,看看是不是真的修好了。确认没问题,工单才真正关闭。
这套闭环走下来,隐患不会漏,整改不会拖,责任也清晰。
几个核心指标
跑了这么久,有些数据可以拿出来说:
- 一架无人机飞一趟,能覆盖5公里线路
- 工程车巡检速度20到40公里每小时,看路况
- 典型缺陷的识别准确率92%以上
- 从识别到推送告警,3秒内
- 边缘设备平均无故障运行时间超过5000小时
- 后台能同时接100架无人机和50辆工程车
关于扩展性
当时做的时候,特意留了扩展的余地。
摄像头支持ONVIF和RTSP标准协议,想换别的牌子直接换就行。算法模型支持ONNX格式导入,哪天有了更好的模型,不用改代码就能替换。
后台开放了RESTful API,跟电力公司现有的PMS系统、ERP系统对接过几次,数据互通没什么障碍。
这套东西做了两年多,谈不上完美,但确实让巡检的兄弟们少爬了不少塔、少熬了不少夜。技术的意义大概就在这里——把那些危险、枯燥、重复的活儿交给机器,让人去做更有价值的事。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号