基于STM32的垃圾分类项目设计与实现【开源免费】
原创

基于STM32的垃圾分类项目设计与实现【开源免费】
本文项目源码可见文末
随着城市化进程的不断推进,垃圾分类已成为环境保护的关键环节。为了提升垃圾分类的效率和准确性,许多智能垃圾分类系统应运而生。本文将介绍一个基于 STM32 微控制器的垃圾分类项目的设计与实现,涉及硬件选型、软件实现、传感器使用以及系统的调试。
项目概述
本项目的目标是使用 STM32 微控制器开发一套自动化垃圾分类系统。系统利用传感器识别垃圾的种类(如可回收物、厨余垃圾、其他垃圾等),并根据识别结果控制分类机械装置将垃圾分类投放。

在这里插入图片描述
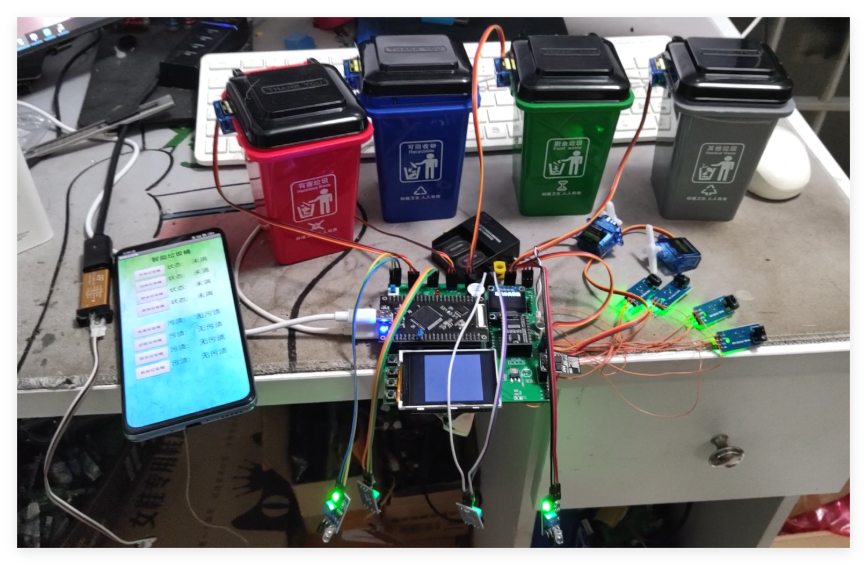
在这里插入图片描述
项目目标:
- 实时垃圾识别:通过传感器识别垃圾类别。
- 自动分类投放:根据识别结果控制分类机构完成垃圾投放。
- 人机交互:提供 LCD 显示屏和按钮操作界面,便于用户管理和查看状态。
硬件设计
1. STM32 微控制器
本项目选择 STM32F103C8T6 作为核心控制单元。STM32 是 STMicroelectronics 推出的 32 位 ARM Cortex-M3 架构的微控制器,具有高效能、丰富的外设接口以及良好的开发环境支持,适合于开发嵌入式系统。
2. 传感器选择
垃圾分类系统需要准确地识别垃圾的种类。为此,我们采用了以下传感器:
- 超声波传感器(HC-SR04):用于测量垃圾的体积或距离,帮助系统识别物品的大小。
- 颜色传感器(TCS3200):根据垃圾的颜色来判断其类别,例如,绿色可能表示厨余垃圾。
- 光电传感器:用于检测垃圾是否进入投放区。
3. 机械设计
本项目使用简单的舵机和直流电机来实现垃圾的分类投放。根据传感器识别的结果,舵机将会控制不同的投放口,确保垃圾能够准确分类。
4. 显示与交互界面
项目还设计了一个简单的 LCD 显示屏(16x2 LCD),用于显示垃圾分类的状态和当前操作信息。此外,按钮接口用于手动控制或调整系统设置。
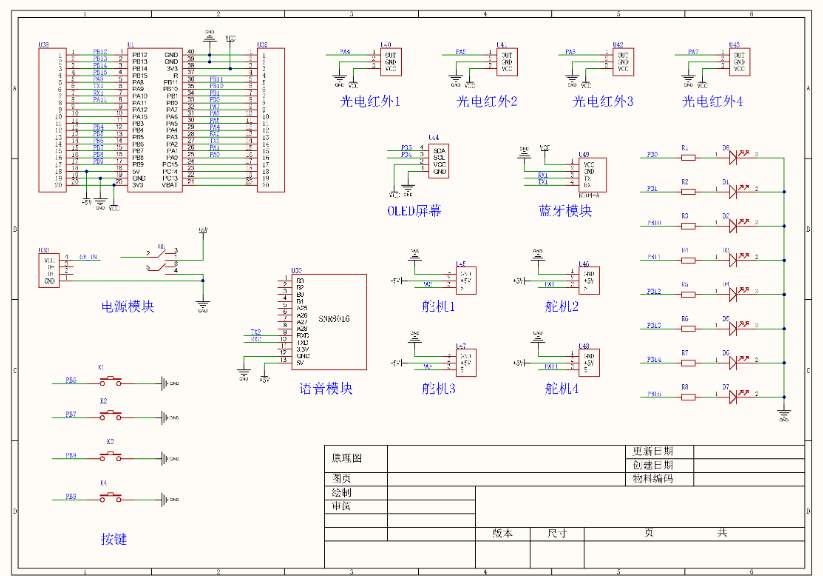
在这里插入图片描述
软件设计
1. 系统架构
系统的软件设计采用了模块化设计,包括传感器读取模块、分类判断模块、舵机控制模块、显示控制模块等。
2. 代码实现
以下是部分代码实现,展示了如何使用 STM32 进行传感器数据读取与处理。
1.1 超声波传感器读取
超声波传感器通过发送和接收声波来测量距离。在 STM32 上,我们通过 GPIO 和定时器来实现超声波传感器的数据读取。
#define TRIG_PIN GPIO_PIN_9
#define ECHO_PIN GPIO_PIN_8
void Ultrasonic_Init(void) {
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOA_CLK_ENABLE();
// 初始化TRIG引脚
GPIO_InitStruct.Pin = TRIG_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// 初始化ECHO引脚
GPIO_InitStruct.Pin = ECHO_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
uint32_t Ultrasonic_Read(void) {
uint32_t pulse_width = 0;
// 发送触发信号
HAL_GPIO_WritePin(GPIOA, TRIG_PIN, GPIO_PIN_SET);
HAL_Delay(10); // 10ms
HAL_GPIO_WritePin(GPIOA, TRIG_PIN, GPIO_PIN_RESET);
// 等待ECHO返回信号
while (HAL_GPIO_ReadPin(GPIOA, ECHO_PIN) == GPIO_PIN_RESET);
uint32_t start_time = HAL_GetTick();
while (HAL_GPIO_ReadPin(GPIOA, ECHO_PIN) == GPIO_PIN_SET);
uint32_t end_time = HAL_GetTick();
pulse_width = end_time - start_time;
// 距离计算:距离 = (脉冲宽度 / 2) * 声音传播速度
uint32_t distance = (pulse_width * 343) / 2000; // 单位:cm
return distance;
}1.2 颜色传感器读取
使用 TCS3200 颜色传感器来读取垃圾的颜色。通过 STM32 的 PWM 输出控制 TCS3200 的频率,然后根据频率值来判断垃圾的颜色。
void Color_Sensor_Init(void) {
// 初始化 TCS3200 传感器的控制引脚
// 使能 TCS3200 传感器的输出频率
}
uint8_t Get_Color(void) {
uint8_t red, green, blue;
// 读取 RGB 色彩值
red = Read_TCS3200_Red();
green = Read_TCS3200_Green();
blue = Read_TCS3200_Blue();
// 简单的颜色分类
if (red > green && red > blue) {
return 1; // 可回收物
} else if (green > red && green > blue) {
return 2; // 厨余垃圾
} else {
return 3; // 其他垃圾
}
}3. 控制模块
舵机控制是系统中的重要部分。根据垃圾分类的结果,STM32 控制舵机来推动不同的投放口。
void Servo_Control(uint8_t category) {
if (category == 1) {
// 控制舵机转动到可回收物投放口
} else if (category == 2) {
// 控制舵机转动到厨余垃圾投放口
} else {
// 控制舵机转动到其他垃圾投放口
}
}系统调试与测试
1. 调试步骤
- 硬件连接:确保所有传感器与 STM32 微控制器正确连接。
- 软件调试:编译并烧录代码,使用调试工具检查传感器数据的读取与舵机控制是否正常。
- 系统集成测试:将所有模块集成,进行系统测试,确保垃圾的分类准确无误。
2. 性能优化
在实际应用中,可能需要根据实际环境进行性能优化,例如调整传感器的灵敏度、优化舵机的响应速度等。
总结
基于 STM32 的垃圾分类项目展示了如何使用微控制器、传感器和机械控制单元来实现自动化的垃圾分类。通过合理的硬件选型和模块化的软件设计,系统能够高效地完成垃圾的分类和投放任务。随着技术的发展,这样的智能垃圾分类系统将有助于提高垃圾分类的效率,为环境保护贡献力量。
源码
https://blog.csdn.net/weixin_52908342/article/details/150876990
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号