从CAD到实际控制:基于NVIDIA Omniverse的高保真机器人仿真

从CAD到实际控制:基于NVIDIA Omniverse的高保真机器人仿真

GPUS Lady
发布于 2026-03-02 21:08:09
发布于 2026-03-02 21:08:09
本文基于2月11日 NVIDIA Live 直播讲座《From CAD to Control With NVIDIA Omniverse: High-Fidelity Robot Simulation and Sim-to-Real Pipelines
》整理
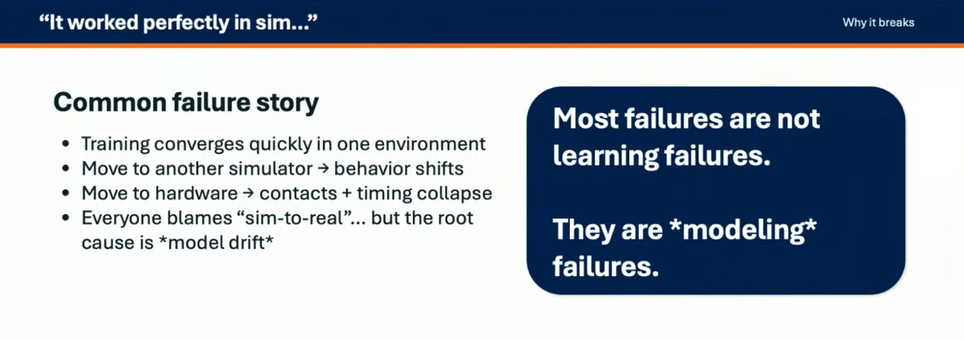
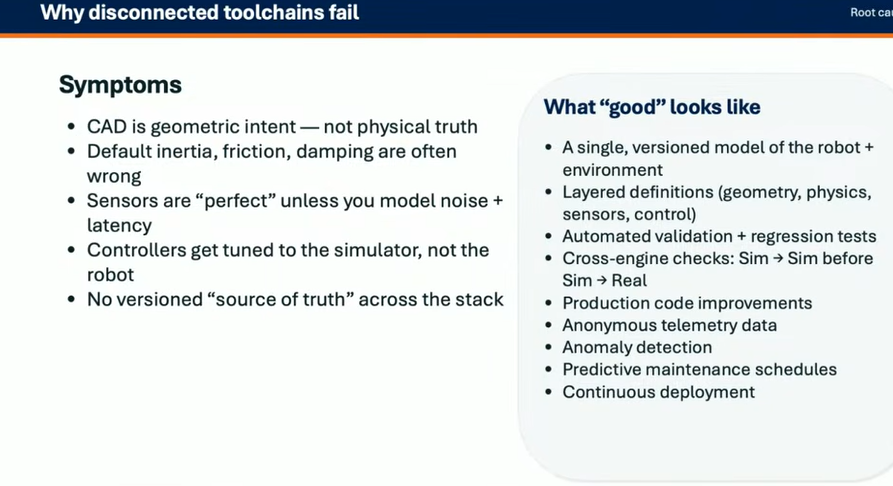
当工程师在仿真环境中完美调试好机器人后,将其部署到真实世界时却频繁遭遇失败——这是机器人开发中最令人沮丧的问题之一。一个能在虚拟环境中流畅抓取物体的机械臂,到了实际场景可能因为地面材质、光照条件或物体重量分布的微小差异而完全失效。这种"仿真到现实"的鸿沟,本质上源于传统仿真流程对物理世界的过度简化。
问题的根源
传统的机器人仿真工作流存在一个根本性缺陷:为了让模型能在Gazebo或PyBullet等仿真器中运行,开发者不得不大幅简化CAD模型。这种简化虽然提升了计算效率,却牺牲了物理准确性。更严重的是,现有仿真系统往往只关注机器人对环境的作用,却忽略了环境对机器人的反作用力。
想象一个人形机器人要坐在办公椅上。在演示视频中,地面总是平整的硬质表面,没有地毯的摩擦变化,没有明亮灯光对传感器的干扰。但现实世界充满了这些"不完美"的细节:办公椅的滚轮会移动,坐垫会产生形变,椅背可以倾斜——这些物理特性如果在仿真中缺失,机器人就无法学会如何安全地完成这个看似简单的动作。
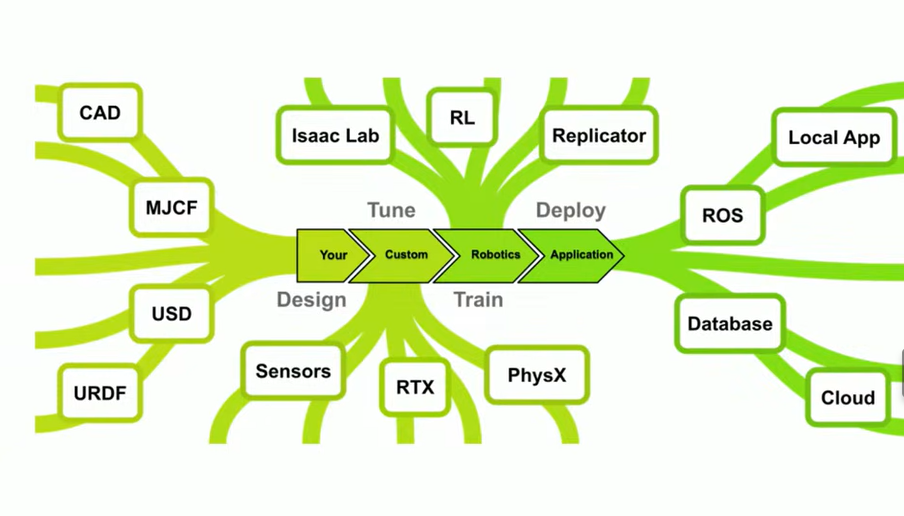
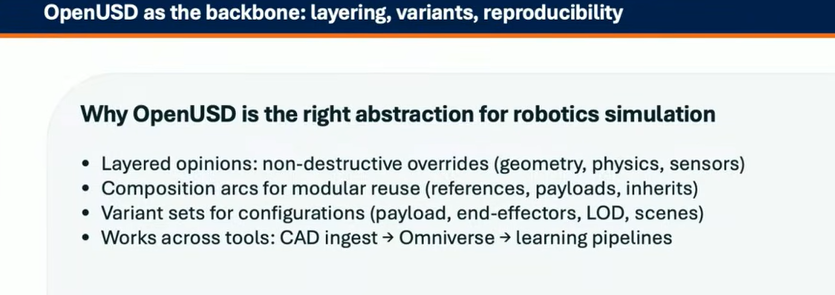
OpenUSD带来的变革
OpenUSD作为开放标准,为解决这个问题提供了新的途径。它的分层架构允许将CAD模型的完整物理属性保留到仿真环节,而不需要在转换过程中丢失信息。每个图层可以独立存储材质、物理参数、传感器配置等数据,这些图层之间还能相互影响,形成完整的物理模型。
以一把从SketchFab下载的普通办公椅模型为例。原始文件只包含网格和材质信息,缺乏任何物理属性。通过开发USD viewer的扩展工具,可以利用生成式AI自动识别模型结构,为椅子添加14个关节、配置滚轮的运动约束、设置坐垫的形变参数。整个过程只需几分钟,不需要手动编辑复杂的物理参数。
这种自动化流程的价值在于可扩展性。机器人需要与真实世界中的具体物品交互,而不是泛化的代表性物体。虽然神经网络擅长学习如何抓取杯子或容器这类常见物品,但面对独特物品——比如一副打开的眼镜——就需要准确的物理模型来指导训练。通过批量处理,这套工具可以为成千上万的日常物品自动生成高保真的仿真资产。
物理引擎的选择
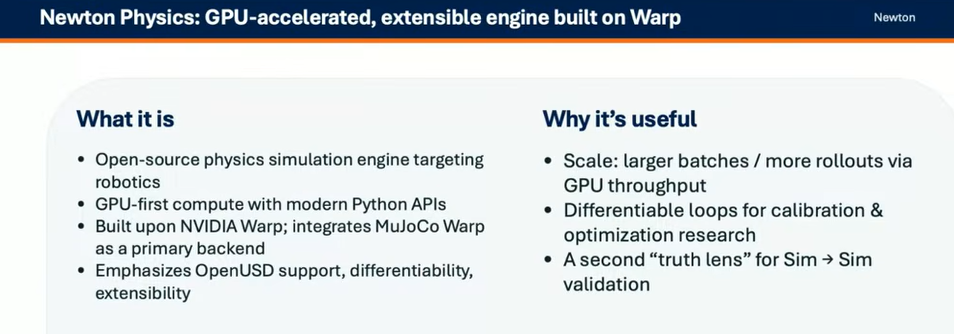
不同的物理引擎适用于不同的开发阶段。PhysX提供高保真度的渲染和碰撞检测,适合在Isaac Sim中进行完整的场景仿真。而NVIDIA Warp和Newton Viewer则专注于快速的物理计算,能在GPU上并行运行大量实验,更适合强化学习的训练阶段。
以纸飞机模型为例。要让虚拟纸飞机在仿真中真实地滑翔,需要计算升力、阻力、重力等基本飞行力学。这些物理方程并非引擎内置功能,而是通过Warp编写自定义物理内核实现的。代码可以精确控制纸张表面积、质量分布和空气动力学参数,即使将飞机倒置发射,它仍会按照真实物理规律调整姿态后滑翔。
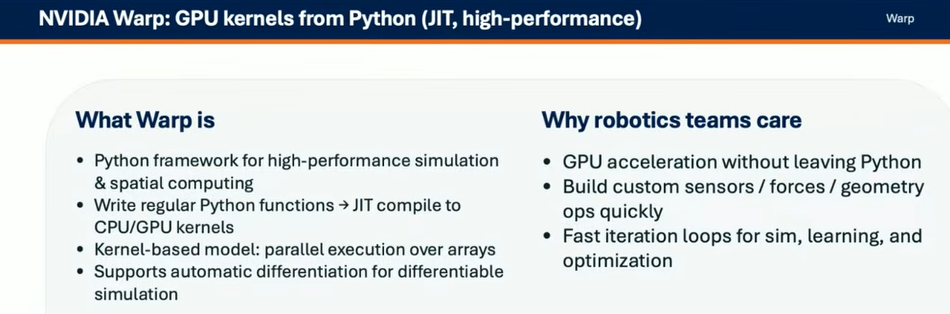
重要的是,Warp使用Python编写,降低了实验的门槛。当概念验证完成后,代码可以转换为C++或Rust以提升生产环境的性能。这种渐进式的开发路径让研究人员能够快速迭代想法,同时保证最终部署的效率。
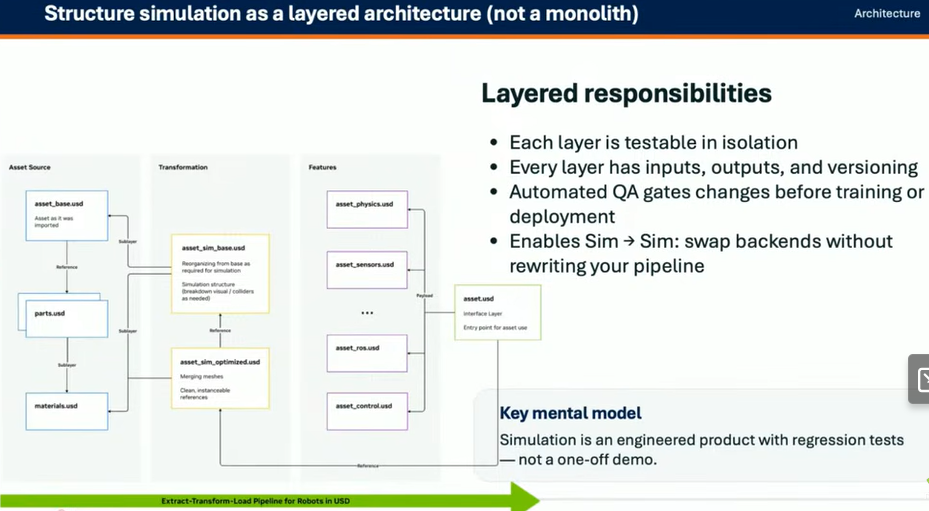
仿真到仿真到现实的循环
单一仿真器难以覆盖所有测试场景。从Isaac Sim转移到Mujoco或Newton Viewer,可以在不同层面验证机器人的性能。在Isaac Sim中完成传感器集成和环境交互的测试后,可以将模型导出到专注于物理计算的轻量级仿真器中,以更快的速度进行大规模强化学习训练。
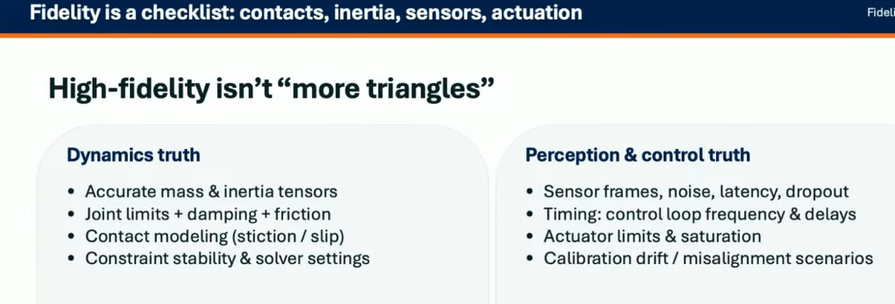
这不是一次性的单向流程,而是持续的迭代循环。机器人在真实环境中收集的遥测数据会反馈回仿真系统,用于修正物理模型的偏差。传感器噪声、执行器延迟、材料磨损等现实因素都需要在这个循环中不断校准。通过域随机化技术,可以在仿真中注入各种扰动,让模型学会处理异常情况,而不是只在理想条件下工作。
关键的一点是,仿真必须捕捉环境对机器人的影响,而不仅仅是相反。当机器人踩在地毯上,地毯的摩擦系数、纤维的形变都会反作用于机器人的步态控制。当机械臂抓取橙子,果皮的弹性会影响抓取力的分布。这些双向的物理交互决定了仿真的准确度。
构建可信赖的资产库
高保真仿真需要高保真的环境资产。门把手、抽屉、冰箱——这些日常物品的物理特性都需要精确建模。虽然手工制作这些资产耗时巨大,但生成式AI提供了新的可能。通过输入物品的描述和照片,AI可以推断出关节位置、运动范围、材料属性等信息,自动生成符合物理规律的USD文件。
这个过程需要在保真度和计算成本之间取得平衡。对于简单的机械结构,自动生成已经足够准确。但对于某些特殊材料——比如可形变的线缆或者橙子的果肉——可能仍需要通过实际测量力响应曲线来建模。开源资产库正在填补这个空白,提供经过验证的高质量模型供开发者使用。
技术民主化的愿景
降低机器人开发的门槛需要完整的工具链支持。从CAD导入、物理标注、仿真训练到真实部署,每个环节都需要自动化和标准化。平台即服务的模式让中小团队也能访问先进的仿真资源,无需投入大量基础设施建设。
更重要的是知识的传播。通过公开技术细节、提供教育资源,让更多开发者能够参与机器人创新。从大学实验室到创业公司,多样化的参与者将推动机器人技术走向实用化。当一个人形机器人的成本降至一万到两万美元,它需要能够完成十项有价值的任务才值得购买——这需要整个生态系统的协作,而不是少数巨头的垄断。
仿真技术的进步正在缩小虚拟与现实的差距。但最终目标不是完美的仿真,而是安全可靠的机器人——能够在我们的家庭、办公室和医院中与人类和谐共处的智能体。这需要在每个开发环节都优先考虑安全性,通过充分的仿真测试暴露潜在风险,而不是等到部署后才发现问题。
更多最新NVIDIA讲座整理
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-02-12,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号