西门子S7-1200/1500系列PLC通过EPOS报文及SinaPos(FB284)控制伺服时候Jog的速度怎么给定?

西门子S7-1200/1500系列PLC通过EPOS报文及SinaPos(FB284)控制伺服时候Jog的速度怎么给定?

Hello工控
发布于 2025-12-23 14:34:35
发布于 2025-12-23 14:34:35

我们前面几期分享的:西门子S7-1200/1500系列PLC通过111报文及SinaPos(FB284)实现对汇川SV660F系列伺服的基本位置控制
在分享后,也有朋友在使用过程中,发现EPOS报文结合SinaPos功能块控制时,如何实现点动的速度给定呢?

我们这期以1500PLC和汇川伺服660F系列为例来说明Jog(Modpos = 7)的速度怎么给定的。

SinaPos Jog
我们打开博途TIA软件,拖入Sinapos功能块:

Jog点动功能是最基本的运动控制功能之一,上述接口我们可以看到,主体Jog命令分为了Jog1(负向),Jog2(正向).
当然,我们可以看到输入接口中的Velocity,这个速度从定义上看,和Jog运行模式没有关联:

MDI运行模式,我们下期可以单独介绍下,主要指的是定位模式和调整模式,主要针对的是:
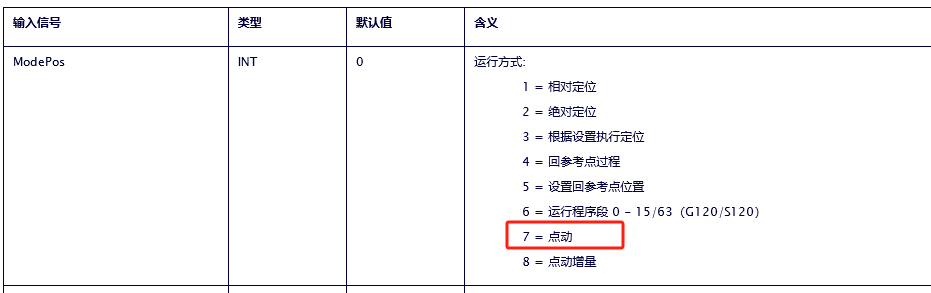
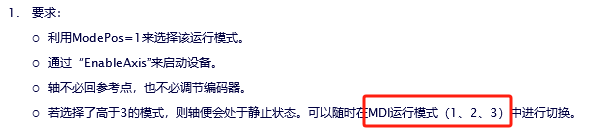
而Jog对应的ModePos是7。所以,Jog的速度不在这里设置。

Jog速度设置
那既然不在PLC中设置,在哪里设置呢?
答案当然是在对应的伺服驱动器或者变频器中,这里还是以汇川660F系列伺服为例说明,打开伺服驱动的软件后:

EPOS对应的控制参数:H25.14负向点动速度,H25.16正向点动速度,需要注意单位是1000LU/min。
我们以上述设置为例说明Jog2正向点动速度是怎样对应的?

其中:
- H25.16 -- 驱动器设定的EPos-Jog2速度值
- 1000 -- H25.16的单位1000LU/min
- H05.07 -- 电子齿轮比的分子
- H05.09 -- 电子齿轮比的分母

如果是23位绝对值编码器电机(编码器分辨率=8388608),那么对应的Jog2速度:
Jog2 速度 = (3000 * 1000 * 8388608 / 10000) / 8388608
= 300 (rpm)
如果是直连丝杆,实现直线运动,例如,丝杆导程为5mm,那么实际的Jog2速度为:300 * 5 / 60 = 25 (mm/s)。

图片
改变Jog速度
那如果要实现Jog速度的变化呢?如何通过变量来实现Jog速度的改变?
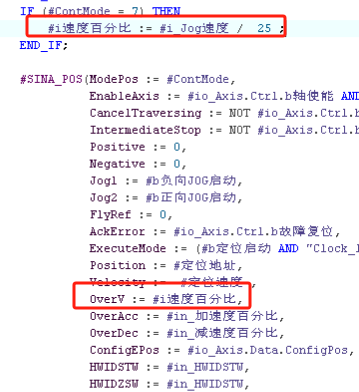
这里就可以借助OverV来实现速度的改变:
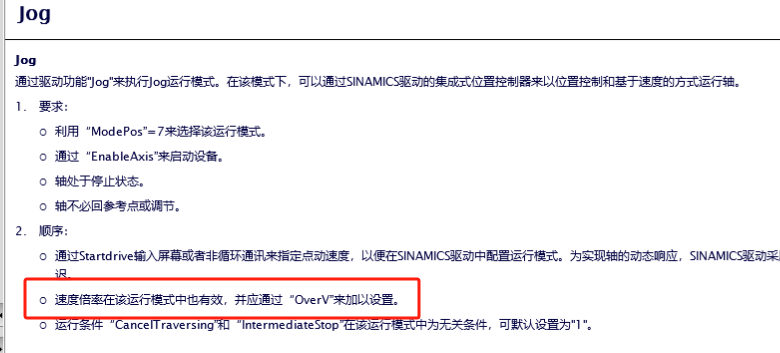
根据这个思路,那么就可以去改变Jog点动的速度了,例如:输入5mm/s的速度,那么我计算这个百分比,设置进去就可以了。注意OverV的范围是0-199%。
以上就是EPOS下的Jog点动速度的设定方式,那么,如果大家有更好的经验,欢迎留言讨论哦!
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-09-05,如有侵权请联系 cloudcommunity@tencent.com 删除
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号