从概念到认知,HyperMesh 映射网格划分到底是什么?
原创
从概念到认知,HyperMesh 映射网格划分到底是什么?
原创
智造AI-CAE
发布于 2025-10-10 15:00:50
发布于 2025-10-10 15:00:50
对 CAE 工程师而言,HyperMesh 是前处理环节的 “高效伙伴”,尤其在网格划分模块表现突出。它凭借强大的几何处理能力,可轻松应对各类复杂模型的简化与修复;再配合精准的网格生成算法,既能大幅缩短网格创建时间,又能严格控制网格畸变率、Aspect Ratio 等关键质量指标,为后续有限元分析筑牢数据基础,是实现高质量网格划分的必备工具。
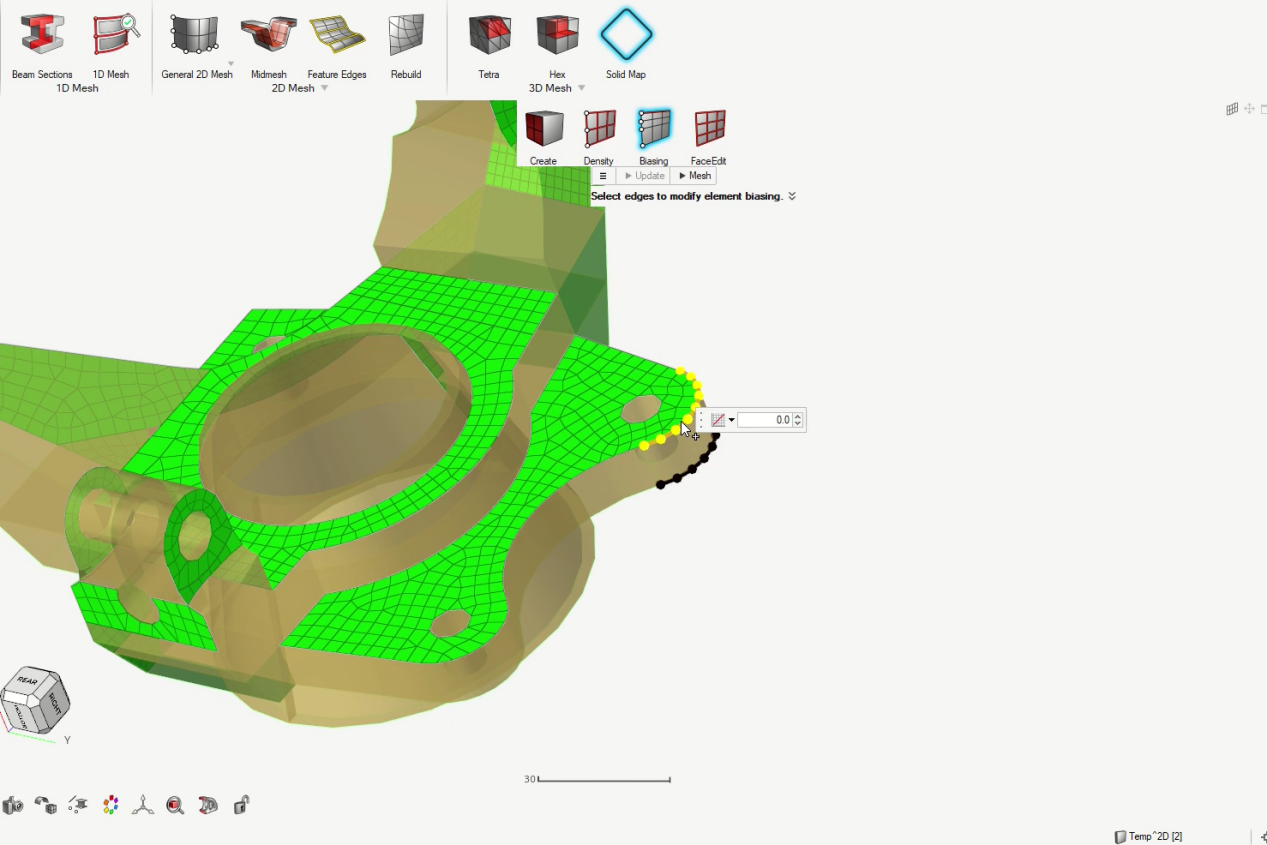
网格划分
在有限元分析中,网格划分质量对求解效率与精度影响重大,映射网格划分是提升六面体单元占比的关键技术。尤其在追求模型用全六面体单元,或尽可能多六面体单元以优化求解表现时,映射网格划分的价值愈发凸显。下面详细解析其核心概念与HyperMesh中映射体判定规则。
一、映射网格划分的核心目标
映射网格划分旨在为模型构建以六面体单元为主的网格体系。理想状态是全六面体单元,实际允许少量棱柱、四面体、金字塔形单元“补缺”,通过最大化六面体单元占比,利用其规整性降低计算复杂度,实现求解效率与精度的双重提升。
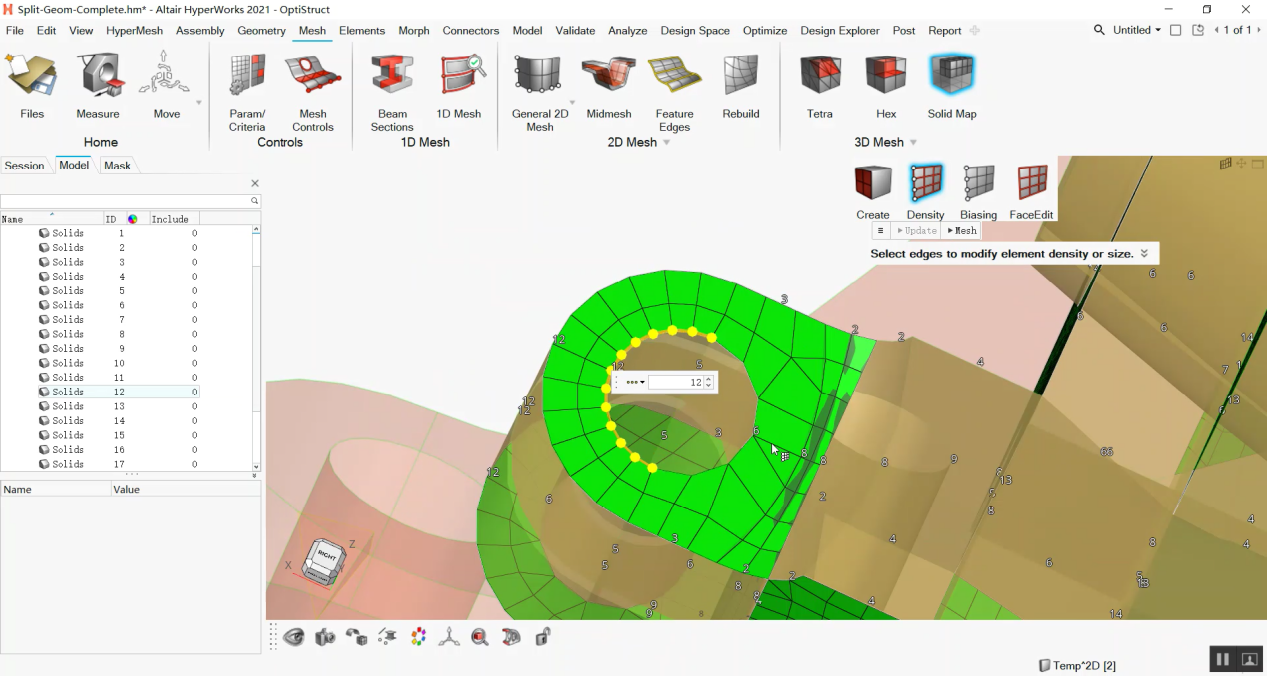
HyperMesh
二、HyperMesh映射网格划分的基础——映射体
映射网格划分的前提,是将几何模型拆解为“映射体”,理解映射体是掌握该技术的关键。
(一)映射体的定义
映射体是一类特殊几何体,可由“源面”沿特定“拉伸路径”生成。简单来说,选定一个平面/曲面(或多个组合)作为源面,让其沿着直线/曲线(路径不能有交叉干扰)拉伸,扫过的空间形成的几何体就是映射体。比如,以圆形面为源面,沿直线拉伸,可生成圆柱体映射体;若源面是复杂曲面,沿曲线路径拉伸,能构造特殊形态的映射体。
(二)HyperMesh映射体的判定条件
HyperMesh对映射体的判定相对灵活,但需满足基础规则:
- 拉伸路径无干扰:路径是源面拉伸的“轨道”,必须是连续直线/曲线,且路径方向上不能有交叉线。若路径杂乱,源面拉伸会“撞车”,无法形成规则映射体。
- 源面与目标面规则:源面可单个或多个平面/曲面组合,但目标面只能有一个 。源面负责“起始形态”,目标面限定“终点形态”,保证映射体拉伸过程形态可控,为后续网格划分奠定基础。
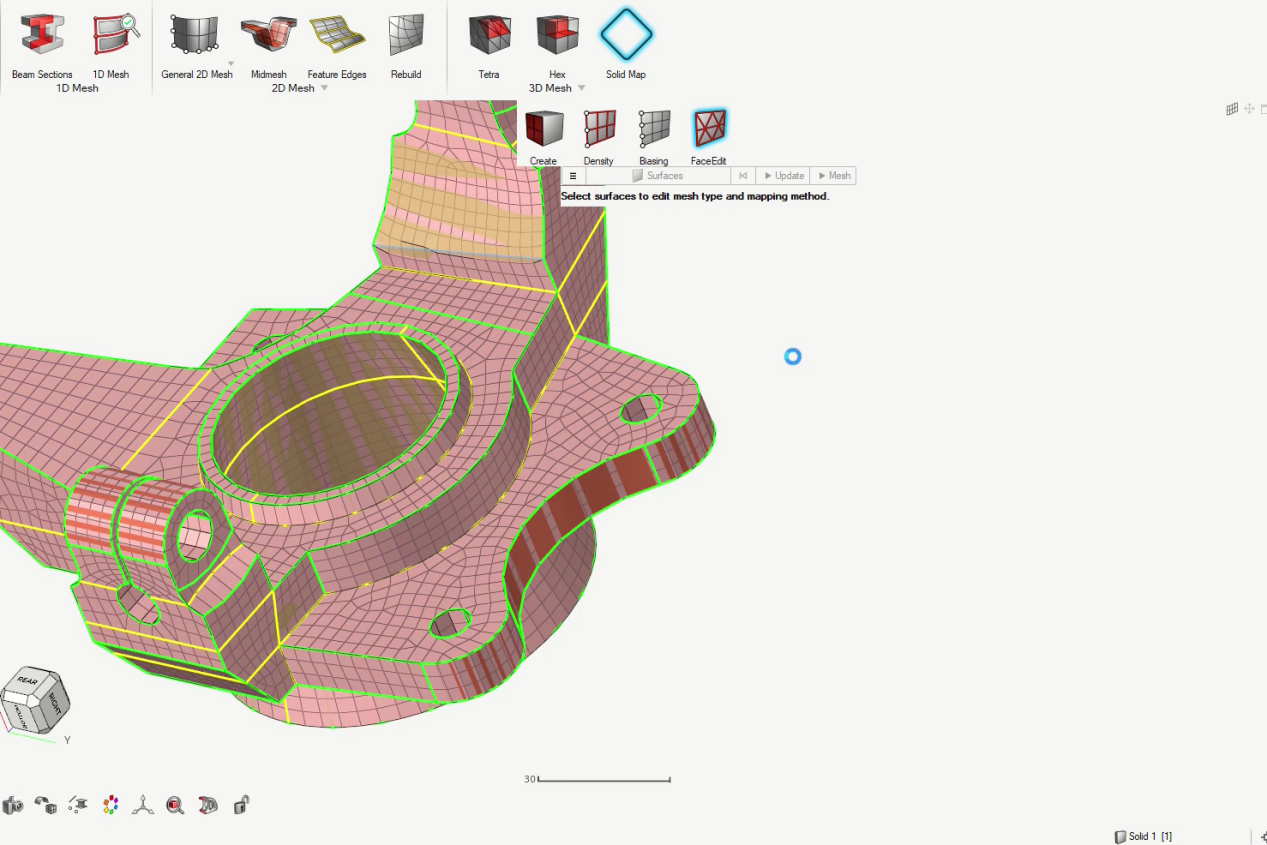
网格划分
- HyperMesh 进行映射网格划分的核心逻辑,是先将模型拆解为规则映射体。基于这些标准化几何体,软件才能有序推进网格生成工作,为后续构建以六面体单元为核心的高质量网格铺路。而掌握映射体的定义与判定条件,是工程师开启 HyperMesh 映射网格划分功能的 “入门钥匙”,只有做好这一步,才能在有限元分析中精准把控网格质量,充分挖掘高效求解的价值。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号