UWB自动跟随技术原理与核心架构解析


1. 引言
近年来,随着机器人、无人车、智能行李箱、辅助出行设备等市场的快速发展,自动跟随技术成为一种重要的交互方式。传统的跟随方法主要依赖视觉(如目标检测、颜色追踪)或无线信号(如蓝牙RSSI、WiFi RTT),但在精度、延迟、稳定性等方面存在不足。 UWB(Ultra Wide Band,超宽带)技术的出现,为自动跟随带来了新的突破——厘米级定位精度、亚毫秒级延迟、极强的抗多径干扰能力,使其在室内外复杂环境中均能稳定工作。
2. 技术原理
UWB自动跟随的核心在于高精度实时定位。它通过在数百MHz到数GHz的超宽频带上发送极窄脉冲信号,并利用“飞行时间(TOF)或到达时间差(TDOA)”计算目标相对于参考点的精确位置。
2.1 信号特性
- 脉冲宽度:< 1ns
- 带宽:> 500MHz(FCC规定3.1~10.6GHz)
- 穿透能力:可穿透非金属材质,如木板、塑料、人体
- 抗多径能力:窄脉冲减少了多路径重叠,提高精度
2.2 定位方式
1. TOF(Time of Flight) 测量信号从发送到接收的飞行时间,结合光速计算距离:
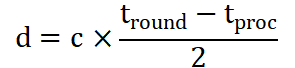
其中:
c 为光速(约 3×10⁸ m/s)
tround 为信号往返时间
tproc 为设备处理延迟
2. TDOA(Time Difference of Arrival)
多个基站同时接收标签信号,通过不同接收时间差计算位置。
3. PDOA(Phase Difference of Arrival)
信号到达不同接收天线的相位差 可以反映出信号传播路径的差异。
通过测量相位差,并结合几何关系,可以计算信号源的方向(Angle of Arrival, AoA)或者距离差(TDoA)。
在UWB中,PDOA常通过两个或多个天线阵列来测量接收到的同一脉冲信号的相位差,从而推算目标的方位角或位置。
2.3 系统架构
一个典型的UWB自动跟随系统由以下部分组成:

- 标签(Tag):安装在用户身上(如腰部、背包),周期性发射信号
- 基站(Anchor):固定在跟随设备(如机器人)或场地参考点
- 主控MCU:运行定位算法、路径规划算法
- 驱动系统:根据目标位置和速度控制电机运动
3. 工程实现细节
3.1 硬件选型
- UWB芯片:Decawave DW1000 / Qorvo DW3000 系列
- 主控:STM32、ESP32、NXP i.MX RT 系列
- 辅助传感器:IMU(加速度计、陀螺仪)、编码器、激光雷达、超声波
3.2 数据融合
为了提高稳定性,UWB常与其他传感器结合:
- UWB + IMU:短时无信号时用IMU推算位置
- UWB + 视觉:在近距离用视觉做细跟随,UWB做长距离定位
- UWB + 超声波:避免近距离碰撞
常用融合算法:
- EKF(扩展卡尔曼滤波)
- UKF(无迹卡尔曼滤波)
- 粒子滤波(复杂场景下多目标跟踪)
3.3 路径规划
- 直线跟随:适合开阔环境
- 避障跟随:结合激光雷达或视觉SLAM,规划绕行路线
- 队列跟随:多个设备按队列移动
4. 优势与挑战
优势:
- 定位精度高(±10cm)
- 延迟低(<10ms)
- 抗干扰能力强,穿透力好
挑战:
- 室外大范围部署成本高
- 遮挡下定位误差增大
- 需要额外功耗优化
5. 应用案例
PSICV随辅物流搬运机器人:多传感器融合及路径规划算法,在仓库中跟随搬运员行走
Soffofel随福电动轮椅:多方位跟随,一键召唤,在商场中自动跟随护理人员
Soffofel随福无人行李箱:多方位跟随,一键召唤,在机场自动跟随主人
6. 总结与未来
未来,UWB自动跟随将向低功耗、小型化、多传感融合、云端协同方向发展,并与蓝牙LE、WiFi RTT等技术融合,实现跨场景的无缝跟随。
本文系转载,前往查看
如有侵权,请联系 cloudcommunity@tencent.com 删除。
本文系转载,前往查看
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号