【“荔”刻出发 | 启发式A*算法原理&实现】
原创

一、任务背景
在蓝桥杯竞赛、acwing等算法竞赛中,路径规划问题常常出现,在大学阶段我们常常采用Dijkstra、Floyd算法实现路径最小问题。作为圣人钦点的“荔枝使”,我需要从“深圳”将荔枝运往“西安”,并且将路径和总代价告知圣人。目前圣人已经将城市地图以及各个城市的通行时间告诉了我,如下所示:
city_graph = {
'深圳': {'广州': 1.5, '东莞': 1.0},
'广州': {'深圳': 1.5, '韶关': 2.5, '长沙': 5.5},
'东莞': {'深圳': 1.0, '惠州': 1.2},
'惠州': {'东莞': 1.2, '武汉': 8.0},
'韶关': {'广州': 2.5, '长沙': 4.0},
'长沙': {'韶关': 4.0, '武汉': 3.0, '郑州': 8.0},
'武汉': {'惠州': 8.0, '长沙': 3.0, '郑州': 4.5, '西安': 10.0},
'郑州': {'长沙': 8.0, '武汉': 4.5, '洛阳': 2.0},
'洛阳': {'郑州': 2.0, '西安': 5.0},
'西安': {'武汉': 10.0, '洛阳': 5.0}
}当我正想用大学算法题常用的Dijkstra、Floyd算法解决这个”简单“的问题时,突然发现,这些算法仅仅是适用于静态的路径规划算法,而在现实交通系统中,路径状态是动态变化的。当存在路径突发情况时,例如断路、临时交通管制、油价波动导致成本变化等都会导致算法需要重构,导致一定的时间延迟,都无法满足系统实时性的需求。
场景 | Dijkstra处理方式 | Floyd处理方式 |
|---|---|---|
突发断路 | 需全图重新计算 | 必须重构整个距离矩阵 |
临时交通管制 | 无法增量更新 | 需全量重算 |
油价波动导致成本变化 | 需重新执行完整算法 | 重新构建成本矩阵 |
为了实现能够应对不同突发情况的场景的算法,我想到了采用启发式算法A-star算法,它结合了Dijkstra算法的完备性和贪心算法的效率。A-star算法可以通过使用启发式函数来估计从当前节点到目标节点的成本,从而优先探索最合适的路径。而当A-star算法遇到以上情况时,只需要局部规划、动态调整启发函数,或者仅仅更新列表权重即可实现。
二、A-star算法原理
A-star算法是综合考虑了到当前节点的实际代价g(n) 以及估算代价h(n) (与贪心算法不同,可以引导搜索方向):f(n) = g(n)+h(n) ,当不考虑估算代价时,就会退化为Dijkstra算法。因此,如何设计一个估算代价成为提高算法效率的关键因素,一个好的估算代价可以在第一次搜索中就找到最优解。
🔴 hh(n)=0:退化为Dijkstra算法;(完全一致)
🔴 hh(n) > >g(n):A-star算法趋近于贪心算法(可能错过最优解);
A-star实现原理:
🟢 维护了一个开放列表(优先队列实现)和关闭列表;
🟢 在每次遍历过程中,将可能的ff(n)存入开放列表中,已经经过的节点存进关闭列表【与Dijkstra算法不同的只有将ff(n)改为gg(n)】;
🟢 当从开放列表中找到结束节点时,算法终止;
三、A-star算法实现
① 只考虑花费时间,不考虑其他代价时,即h(n)=0, f(n)=g(n)
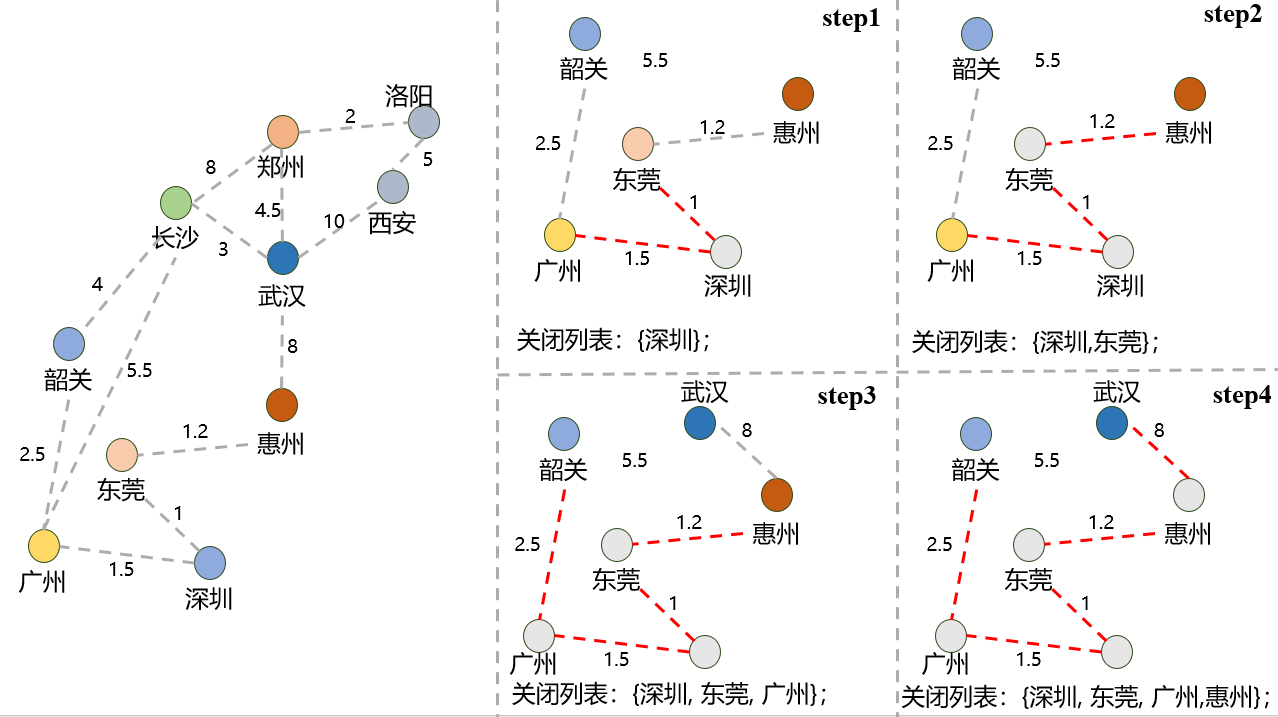
迭代过程:
初始化开放列表: {深圳(g=0, f=0)},关闭列表:{};
step1:此时深圳只能连接到广州和东莞,到达广州和东莞的时间代价分别是1.5和1,更新开放列表:广州(g=1.5, f=1.5), 东莞(g=1.0, f=1.0)},关闭列表:{深圳};
step2:在开放列表中,f值最小是到达东莞,因此模拟到达东莞,在东莞还能到达惠州,更新开放列表: {广州(g=1.5, f=1.5), 惠州(g=2.2, f=2.2)},此时到达东莞,东莞进入关闭列表中,更新关闭列表: {深圳, 东莞}
step3:在开放列表中,f值最小是广州1.5,因此模拟到达广州,在广州还能到达韶关、长沙,更新开放列表: {惠州(g=2.2, f=2.2), 韶关(g=4.0, f=4.0), 长沙(g=7.0, f=7.0)},将广州降入关闭列表中,关闭列表: {深圳, 东莞, 广州}
step4:在开放列表中,f值最小是惠州2.2,因此模拟到达惠州,在惠州还能到达武汉,更新开放列表: {韶关(g=4.0, f=4.0), 长沙(g=7.0, f=7.0), 武汉(g=10.2, f=10.2)} ,将惠州降入关闭列表中,更新关闭列表: {深圳, 东莞, 广州, 惠州}
以此类推,直到将西安加入到关闭列表中
- 算法实现
import heapq
def a_star_search(graph, start, goal):
# 所有启发函数设为0,退化为 Dijkstra,但保留 A* 框架
heuristic = {city: 0 for city in graph}
# open list,优先队列,元素格式:(f(n), g(n), 路径)
open_list = [(0 + heuristic[start], 0, [start])]
visited = set()
while open_list:
f_score, current_cost, path = heapq.heappop(open_list)
current_node = path[-1]
if current_node == goal:
return path, current_cost
if current_node in visited:
continue
visited.add(current_node)
for neighbor, travel_time in graph[current_node].items():
if neighbor not in visited:
g = current_cost + travel_time
h = heuristic.get(neighbor, 0)
heapq.heappush(open_list, (g + h, g, path + [neighbor]))
return None, float('inf')
city_graph = {
'深圳': {'广州': 1.5, '东莞': 1.0},
'广州': {'深圳': 1.5, '韶关': 2.5, '长沙': 5.5},
'东莞': {'深圳': 1.0, '惠州': 1.2},
'惠州': {'东莞': 1.2, '武汉': 8.0},
'韶关': {'广州': 2.5, '长沙': 4.0},
'长沙': {'韶关': 4.0, '武汉': 3.0, '郑州': 8.0},
'武汉': {'惠州': 8.0, '长沙': 3.0, '郑州': 4.5, '西安': 10.0},
'郑州': {'长沙': 8.0, '武汉': 4.5, '洛阳': 2.0},
'洛阳': {'郑州': 2.0, '西安': 5.0},
'西安': {'武汉': 10.0, '洛阳': 5.0}
}
start_city = '深圳'
end_city = '西安'
path, total_cost = a_star_search(city_graph, start_city, end_city)
if path:
print("最优路径:", " -> ".join(path))
print("总代价(运输时间):", round(total_cost, 2), "小时")
else:
print("未找到从 {} 到 {} 的路径。".format(start_city, end_city))
# 最优路径: 深圳 -> 东莞 -> 惠州 -> 武汉 -> 西安
# 总代价(运输时间): 20.0 小时② 考虑路程花费,即h(n)=cost, f(n)=g(n)+h(n)
只是在源代码的基础上修改以下h(n)即可
import heapq
def a_star_multi_objective(graph, start, goal):
heuristic = {city: 0 for city in graph} # 启发函数设为0
open_list = [(0, 0, 0, [start])]
visited = set()
while open_list:
f_score, total_time, total_cost, path = heapq.heappop(open_list)
current_node = path[-1]
if current_node == goal:
return path, total_time, total_cost
if current_node in visited:
continue
visited.add(current_node)
for neighbor, info in graph[current_node].items():
if neighbor not in visited:
time = info['time']
cost = info['cost']
g_time = total_time + time
g_cost = total_cost + cost
g = g_time + g_cost
f = g + heuristic.get(neighbor, 0)
heapq.heappush(open_list, (f, g_time, g_cost, path + [neighbor]))
return None, float('inf'), float('inf')
city_graph = {
'深圳': {'广州': {'time': 1.5, 'cost': 40}, '东莞': {'time': 1.0, 'cost': 30}},
'广州': {'深圳': {'time': 1.5, 'cost': 40}, '韶关': {'time': 2.5, 'cost': 60}, '长沙': {'time': 5.5, 'cost': 120}},
'东莞': {'深圳': {'time': 1.0, 'cost': 30}, '惠州': {'time': 1.2, 'cost': 35}},
'惠州': {'东莞': {'time': 1.2, 'cost': 35}, '武汉': {'time': 8.0, 'cost': 180}},
'韶关': {'广州': {'time': 2.5, 'cost': 60}, '长沙': {'time': 4.0, 'cost': 90}},
'长沙': {'韶关': {'time': 4.0, 'cost': 90}, '武汉': {'time': 3.0, 'cost': 70}, '郑州': {'time': 8.0, 'cost': 160}},
'武汉': {'惠州': {'time': 8.0, 'cost': 180}, '长沙': {'time': 3.0, 'cost': 70},
'郑州': {'time': 4.5, 'cost': 100}, '西安': {'time': 10.0, 'cost': 200}},
'郑州': {'长沙': {'time': 8.0, 'cost': 160}, '武汉': {'time': 4.5, 'cost': 100}, '洛阳': {'time': 2.0, 'cost': 50}},
'洛阳': {'郑州': {'time': 2.0, 'cost': 50}, '西安': {'time': 5.0, 'cost': 100}},
'西安': {'武汉': {'time': 10.0, 'cost': 200}, '洛阳': {'time': 5.0, 'cost': 100}}
}
start_city = '深圳'
end_city = '西安'
path, total_time, total_cost = a_star_multi_objective(city_graph, start_city, end_city)
if path:
print("最优路径:", " -> ".join(path))
print("总时间:", round(total_time, 2), "小时")
print("总费用:", round(total_cost, 2), "元")
print("综合总代价(加权):", round(alpha * total_time + (1 - alpha) * total_cost, 2))
else:
print("未找到路径")
# 最优路径: 深圳 -> 广州 -> 长沙 -> 武汉 -> 西安
# 总时间: 20.0 小时
# 总费用: 430 元除此之外,还可以在对应的代价函数和启发函数上加入权重因子\alpha ,修改代码如下所示:
def a_star_multi_objective(graph, start, goal, alpha=0.7):
heuristic = {city: 0 for city in graph}
open_list = [(0, 0, 0, [start])]
visited = set()
while open_list:
f_score, total_time, total_cost, path = heapq.heappop(open_list)
current_node = path[-1]
if current_node == goal:
return path, total_time, total_cost
if current_node in visited:
continue
visited.add(current_node)
for neighbor, info in graph.get(current_node, {}).items():
if neighbor not in visited:
time = info['time']
cost = info['cost']
g_time = total_time + time
g_cost = total_cost + cost
g = alpha * g_time + (1 - alpha) * g_cost
f = g + heuristic.get(neighbor, 0)
heapq.heappush(open_list, (f, g_time, g_cost, path + [neighbor]))
return None, float('inf'), float('inf')③ 断路模拟
在实际情况中,道路的情况并不是静态的,这也是A-star算法的优点,可以实时的改变自己的启发函数适应突法情况,为了模拟突发情况,加入了一个断路函数:
def simulate_road_closure(graph, from_city, to_city):
new_graph = copy.deepcopy(graph)
if to_city in new_graph.get(from_city, {}):
del new_graph[from_city][to_city]
if from_city in new_graph.get(to_city, {}):
del new_graph[to_city][from_city]
return new_graph
# 模拟断路(如 长沙 到 武汉)
closed_from = '长沙'
closed_to = '武汉'
print(f"\n⚠️ 模拟断路: {closed_from} 与 {closed_to} 之间的道路断开...\n")
# ✅ 可达!最优路径: 深圳 -> 东莞 -> 惠州 -> 武汉 -> 西安
# 总时间: 20.2 小时
# 总费用: 445 元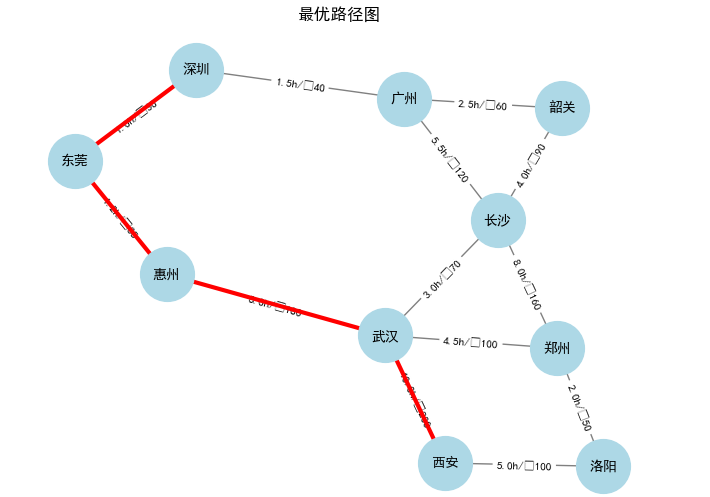
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号