船厂复杂环境下的多模态AI安防系统技术实践
原创
船厂复杂环境下的多模态AI安防系统技术实践
原创
思通数科
修改于 2025-06-11 20:17:34
修改于 2025-06-11 20:17:34
一、系统架构设计
采用五层分布式处理框架:
数据采集层 → 预处理层 → 特征引擎层 → 规则决策层 → 响应闭环层
1. 数据采集层
- 工业级海康摄像头(200万像素/25fps)
- 支持可见光/红外双模式切换
- 气体传感器(甲烷/CO浓度监测)
2. 预处理层
```python
# 动态光照补偿示例代码
def adaptive_CLAHE(img):
lab = cv2.cvtColor(img, cv2.COLOR_BGR2LAB)
l, a, b = cv2.split(lab)
clahe = cv2.createCLAHE(clipLimit=3.0, tileGridSize=(8,8))
cl = clahe.apply(l)
return cv2.merge((cl,a,b))
3. 特征引擎层
- 目标检测:YOLOv8s模型(COCO预训练+船厂场景微调)
- 小目标增强:局部区域超分辨率(ESRGAN)
- 多目标跟踪:ByteTrack算法
二、关键模块技术实现
1. 交通违规检测系统
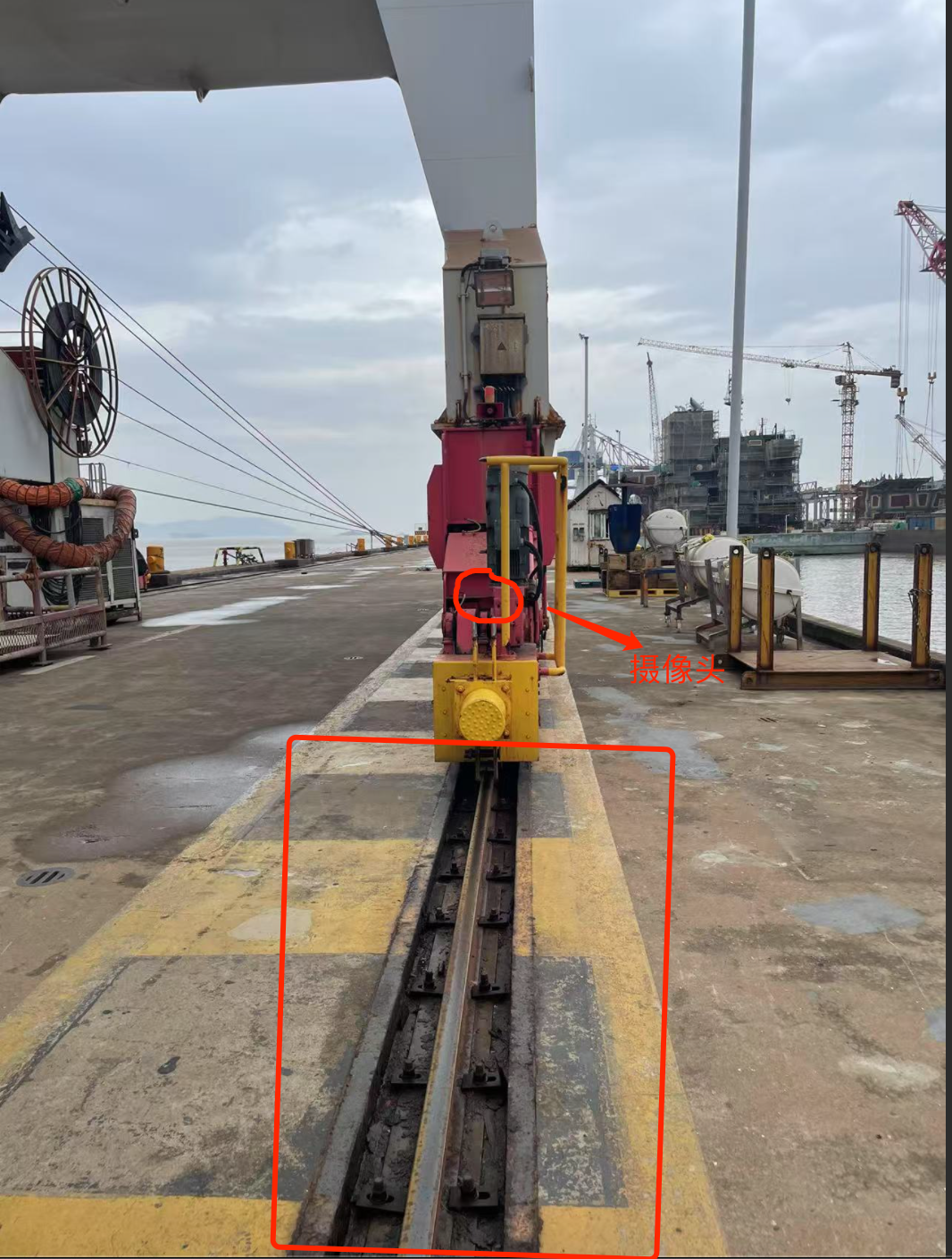
2. 龙门吊防撞系统
- 四路摄像头部署拓扑:

- 报警逻辑:
```c
if (obstacle_distance < 5.0f) {
trigger_alarm(SOUND_LEVEL_120DB); // 工业级抗噪扬声器
}
```
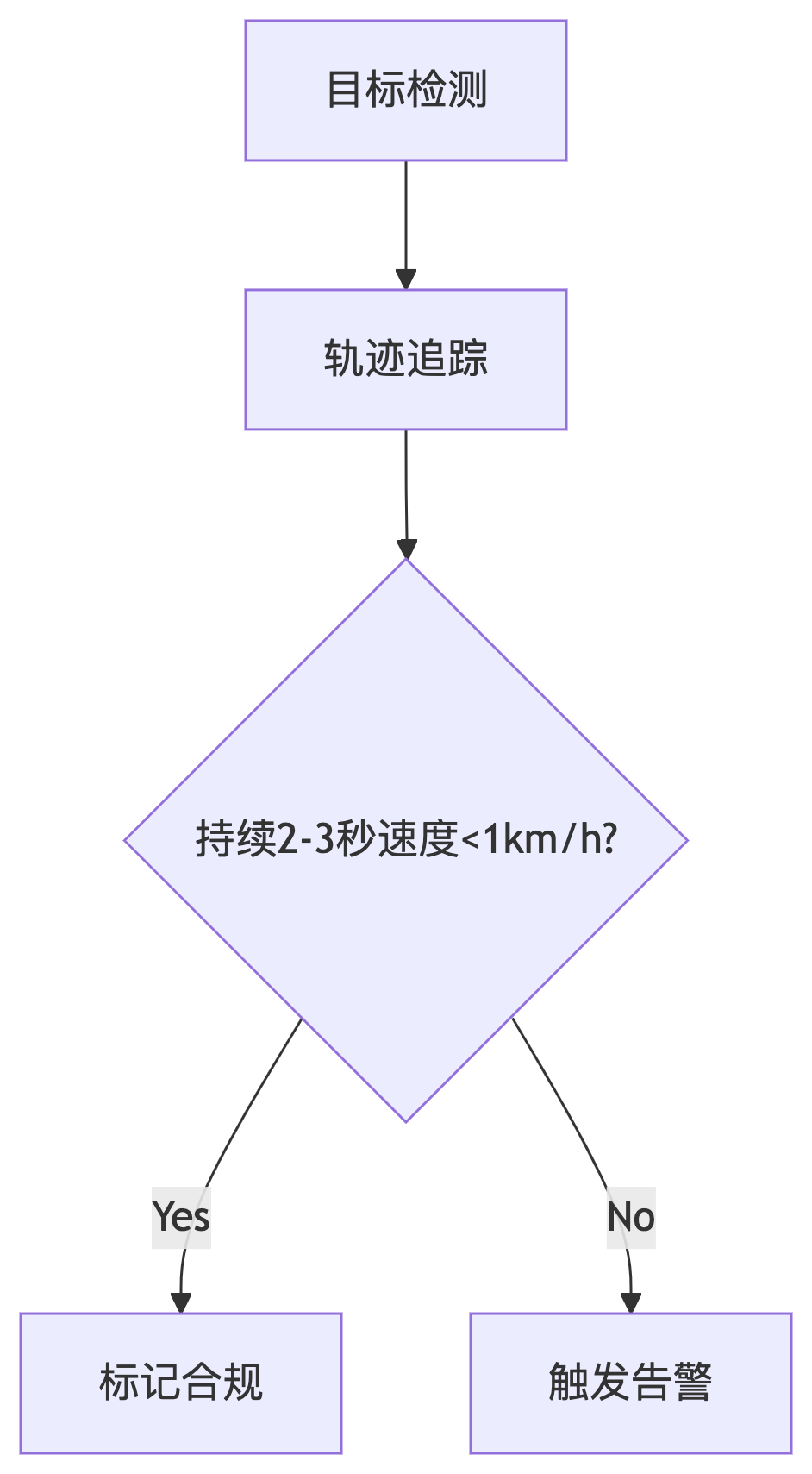
3. 人员滞留检测
- 时空约束规则:
```json
{
"detection_zone": "canteen_area",
"time_window": ["08:00-10:30", "14:00-17:00"],
"threshold": 900, // 15分钟(秒)
"exclude": ["uniform:white_hat"] // 食堂工作人员标识
}
```

三、工程挑战与解决方案
挑战1:小目标检测(如香烟)
采用两阶段检测方案:
1. 人像检测(YOLOv8s@640px)
2. 手部区域裁剪 → 超分辨率(4x) → ResNet18分类
挑战2:工业环境干扰
- 图像处理方案:
- 动态降噪:3D降噪算法
- 运动模糊补偿:Wiener滤波
- 声音报警:120dB脉冲声波(穿透机械噪声)
挑战3:边缘计算优化
- 设备:Jetson AGX Orin
- 模型压缩方案:
| 模型 | 原始精度 | 量化后 | 推理速度 |
|---|---|---|---|
| YOLOv8s | mAP@0.5:0.83 | INT8 | 42ms |
| ResNet18 | Acc:94.7% | FP16 | 18ms |

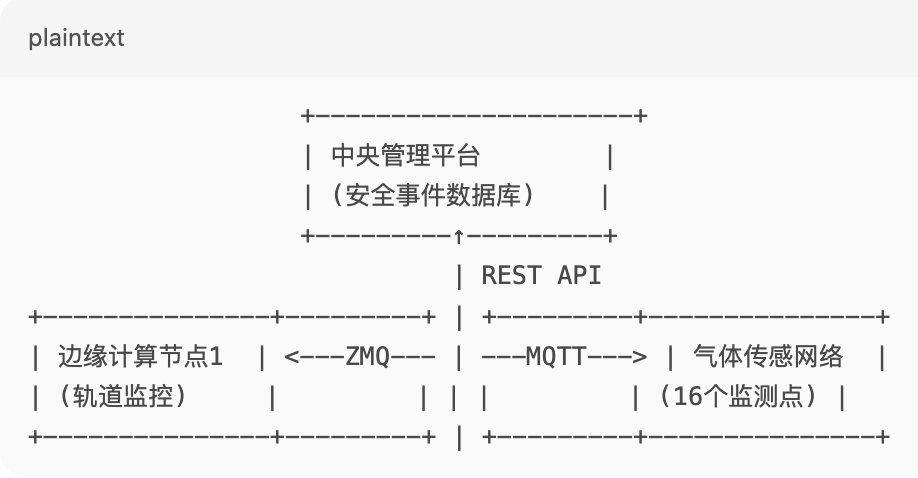
四、系统集成设计
五、技术验证数据
1. 交通违规检测:
- 准确率:92.4% (测试集:5,712个样本)
- 误报率:<3%
2. 障碍物识别延迟:
- 平均:850ms(从识别到报警)
- 99分位:1.2s
技术总结
本文详述了在船厂复杂工业场景中构建AI安防系统的关键技术:
1. 通过多级检测策略解决小目标识别问题
2. 采用边缘-中心协同架构平衡实时性与计算需求
3. 设计时空约束规则引擎实现精准场景判断
4. 验证模型量化方案在边缘设备的可行性
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号