【2025-03-01】基础算法:二叉树 递归 数学归纳法 栈

【2025-03-01】基础算法:二叉树 递归 数学归纳法 栈

用户11029137
发布于 2025-03-02 22:28:28
发布于 2025-03-02 22:28:28
一,递归简述
递归经典模板:
1,前序遍历
def dfs(node, param):
if not node:
return
# 处理当前节点(从上往下)
new_param = update(param, node.val)
dfs(node.left, new_param)
dfs(node.right, new_param)参数传递,从上到下传播
2,后序遍历
def dfs(node):
if not node:
return 0
left = dfs(node.left)
right = dfs(node.right)
# 合并子节点结果(从下往上)
return merge(left, right, node.val)返回值汇总,从下往上
3,中序遍历
def inorder_traversal(root):
result = []
def traverse(node):
if not node:
return
traverse(node.left) # 遍历左子树
result.append(node.val) # 访问根节点
traverse(node.right) # 遍历右子树
traverse(root)
return result4,结合两种方式的示例(先序和后序)
def hasPathSum(root, targetSum):
def dfs(node, current_sum):
if not node:
return False
current_sum += node.val # 从上往下传递路径和
if not node.left and not node.right:
return current_sum == targetSum # 叶子节点返回结果(从下往上)
return dfs(node.left, current_sum) or dfs(node.right, current_sum) # 合并子节点结果
return dfs(root, 0)二,视频题目
104. 二叉树的最大深度
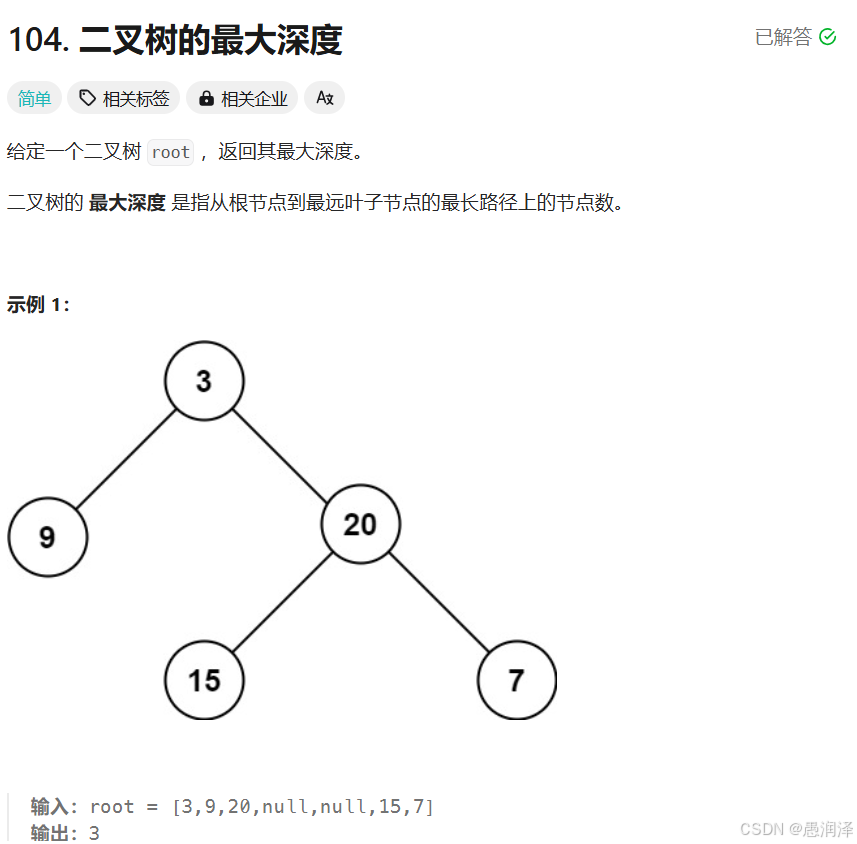

把正在写的本层想做是上层,调用自身函数的时候接收到的是下层的结果返回。 而下层的结果又是来自于下下层,直到最底层满足边界条件的时候,开始“回归”
# Definition for a binary tree node.
# class TreeNode:
# def __init__(self, val=0, left=None, right=None):
# self.val = val
# self.left = left
# self.right = right
class Solution:
# # 从下往上
# def maxDepth(self, root: Optional[TreeNode]) -> int:
# if root is None:
# return 0
# l_depth = self.maxDepth(root.left)
# r_depth = self.maxDepth(root.right)
# return max(l_depth, r_depth) + 1
# 从上往下
def maxDepth(self, root: Optional[TreeNode]) -> int:
ans = 0
def dfs(node, depth):
if node is None:
return
depth += 1
nonlocal ans # 全局变量(用来进行状态的传递和更新)
ans = max(ans, depth)
dfs(node.left, depth)
dfs(node.right, depth)
dfs(root, 0) # 切记这里传入0,进去函数以后depth+1代表root的深度
return ans三,课后作业
111. 二叉树的最小深度

从上到下:
# Definition for a binary tree node.
# class TreeNode:
# def __init__(self, val=0, left=None, right=None):
# self.val = val
# self.left = left
# self.right = right
class Solution:
def minDepth(self, root: Optional[TreeNode]) -> int:
ans = inf
def dfs(node, depth):
nonlocal ans # 声明是全局变量
if node is None:
return
depth += 1
if node.left is None and node.right is None:
ans = min(ans, depth)
return # 提前返回,因为已经是叶子节点了,没有左右子树可以再输入dfs了
dfs(node.left, depth)
dfs(node.right, depth)
dfs(root, 0)
return ans if root else 0从下到上
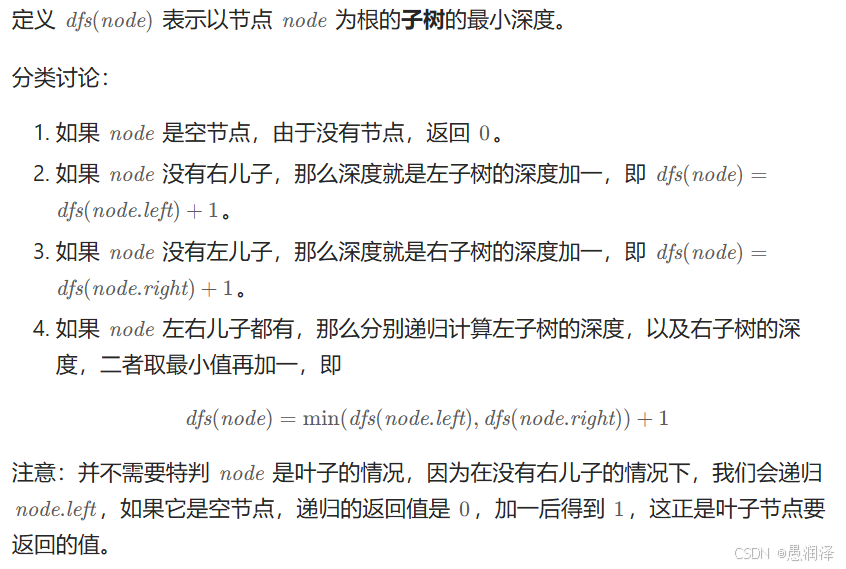
class Solution:
def minDepth(self, root: Optional[TreeNode]) -> int:
if root is None:
return 0
elif root.right is None:
return self.minDepth(root.left) + 1
elif root.left is None:
return self.minDepth(root.right) + 1
else:
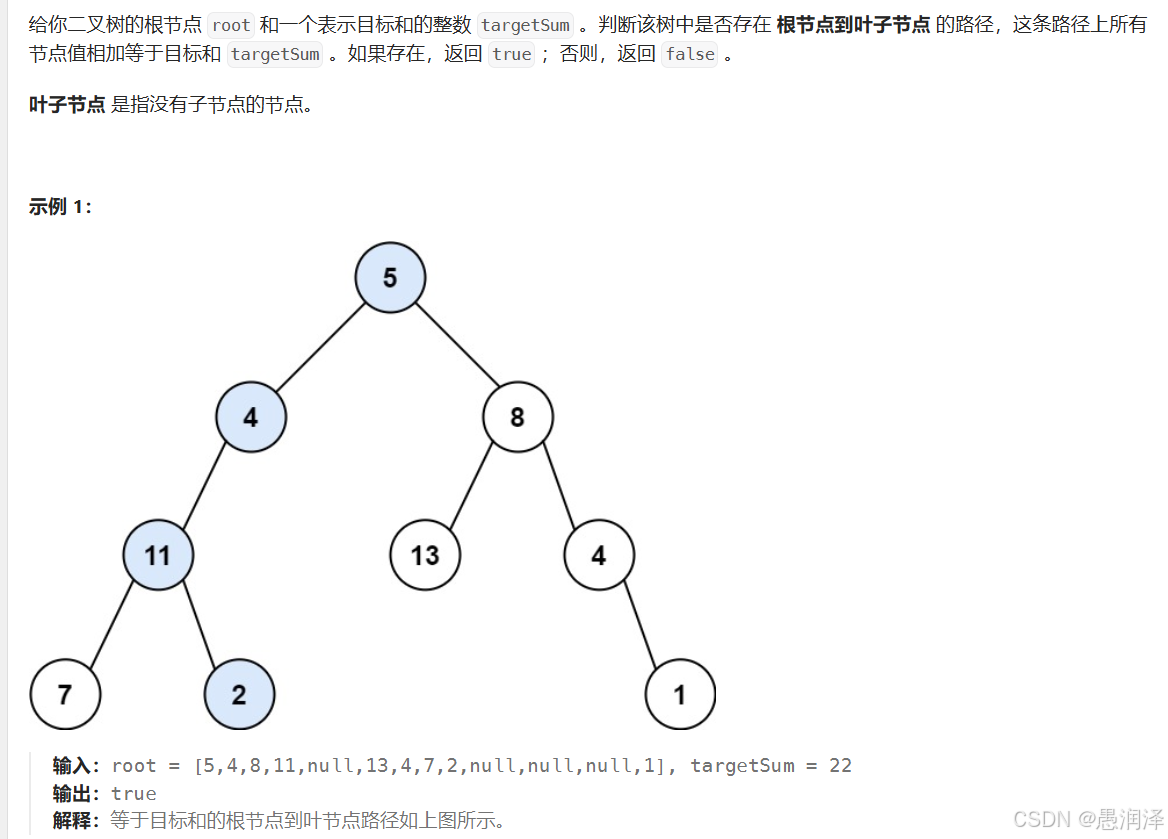
return min(self.minDepth(root.left), self.minDepth(root.right)) + 1112. 路径总和
# Definition for a binary tree node.
# class TreeNode:
# def __init__(self, val=0, left=None, right=None):
# self.val = val
# self.left = left
# self.right = right
class Solution:
def hasPathSum(self, root: Optional[TreeNode], targetSum: int) -> bool:
# 每一层返回的True或者False也会被传递
if root is None:
return False
targetSum -= root.val
if root.left is None and root.right is None:
return targetSum == 0
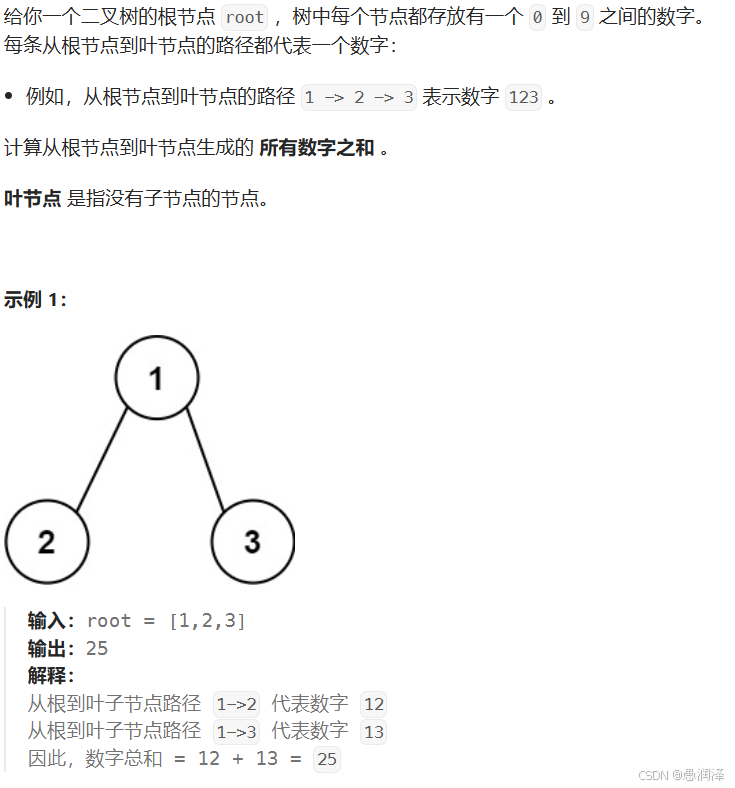
return self.hasPathSum(root.left, targetSum) or self.hasPathSum(root.right, targetSum)129. 求根节点到叶节点数字之和
# Definition for a binary tree node.
# class TreeNode:
# def __init__(self, val=0, left=None, right=None):
# self.val = val
# self.left = left
# self.right = right
class Solution:
def sumNumbers(self, root: Optional[TreeNode], x = 0) -> int:
# dfs从上往下的思想,但是回归的时候还是最底层先返回
if root is None:
return 0
x = x * 10 + root.val
if root.left is None and root.right is None:
return x
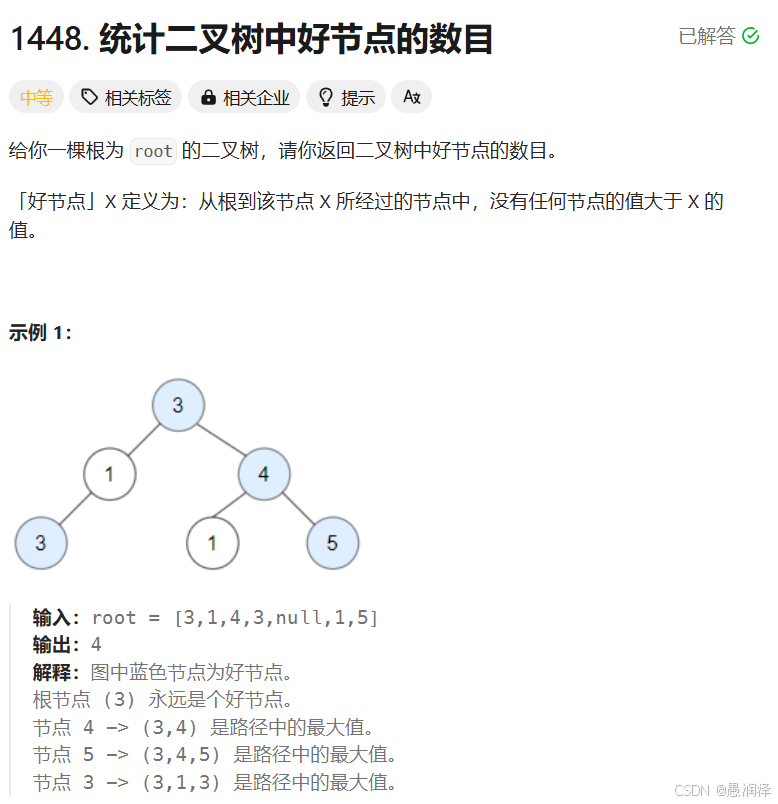
return self.sumNumbers(root.left, x) + self.sumNumbers(root.right, x)1448. 统计二叉树中好节点的数目
# Definition for a binary tree node.
# class TreeNode:
# def __init__(self, val=0, left=None, right=None):
# self.val = val
# self.left = left
# self.right = right
class Solution:
def goodNodes(self, root: Optional[TreeNode], mx=-inf) -> int:
if root is None:
return 0
left = self.goodNodes(root.left, max(root.val, mx)) # 参数传递,上到下
right = self.goodNodes(root.right, max(root.val, mx)) # 在本层里mx不考虑root.val
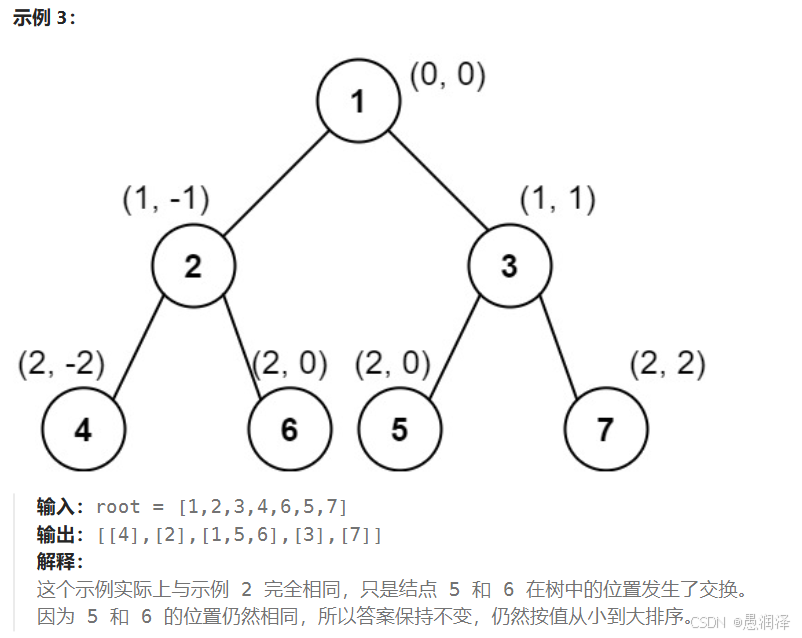
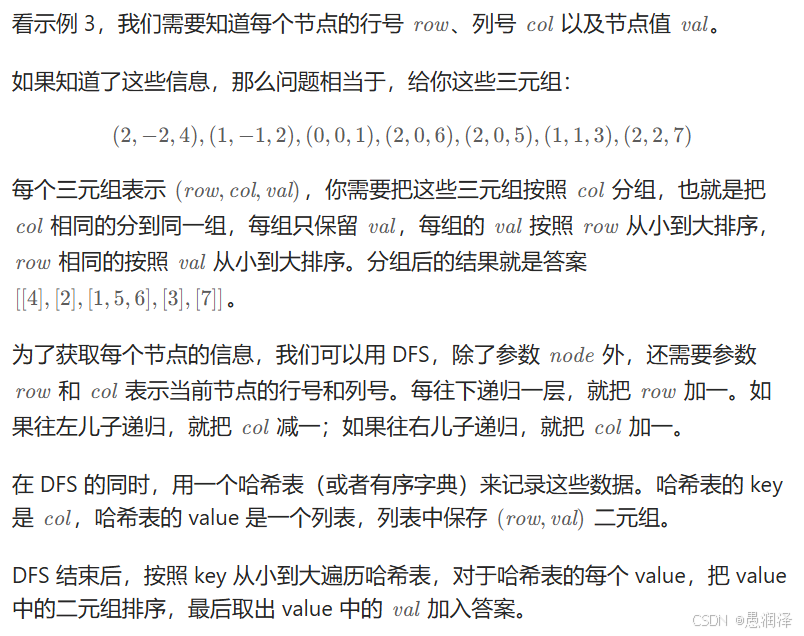
return left + right + (mx <= root.val) # 结果汇总,从下到上987. 二叉树的垂序遍历
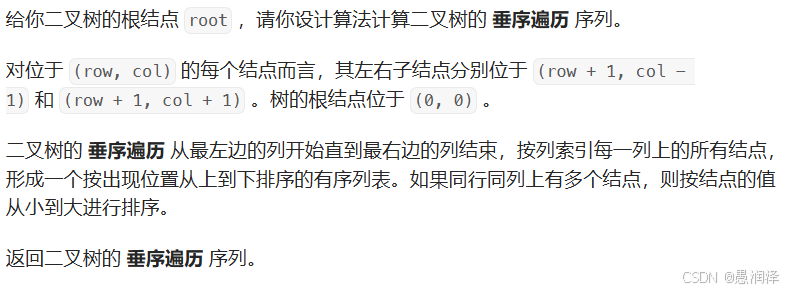
题解:
# Definition for a binary tree node.
# class TreeNode:
# def __init__(self, val=0, left=None, right=None):
# self.val = val
# self.left = left
# self.right = right
class Solution:
def verticalTraversal(self, root: Optional[TreeNode]) -> List[List[int]]:
hasmap = defaultdict(list) # 和字典类似,但是默认元素为list
def dfs(node, row, col):
nonlocal hasmap
if node is None:
return
hasmap[col].append((row, node.val)) # 按col分组,添加每个节点的(row, ndoe.val)
dfs(node.left, row + 1, col - 1)
dfs(node.right, row + 1, col + 1)
dfs(root, 0, 0)
ans = []
for _, g in sorted(hasmap.items()): # items()得到的是键值对
# sorted(hasmap.items()) : 按照col进行排序
# g得到的是每一个col对应的列表,元素是(row, val)
g.sort() # 先按第一个元素 row 排序,row 相同按 val 排序
ans.append([val for _, val in g])
return ans四,sort()和sorted()重要用法
核心区别
特性 | list.sort() | sorted() |
|---|---|---|
返回值 | 原地排序,返回 None | 返回新列表,原列表不变 |
适用对象 | 仅列表 | 任何可迭代对象(列表、元组、字典等) |
时间复杂度 | O(n log n) | O(n log n) |
稳定性 | 稳定排序(相同键值保持原始顺序) | 稳定排序 |
基础用法
1. 默认排序(升序)
# list.sort()
nums = [3, 1, 4, 1, 5]
nums.sort() # 原地排序,nums 变为 [1, 1, 3, 4, 5]
# sorted()
nums = [3, 1, 4, 1, 5]
sorted_nums = sorted(nums) # 返回新列表 [1, 1, 3, 4, 5]2. 逆序排序(降序
nums.sort(reverse=True) # 原地降序 [5, 4, 3, 1, 1]
sorted_nums = sorted(nums, reverse=True) # 新列表降序核心技巧
1. 自定义排序规则(key 参数)
- 按元素的某个属性或计算结果排序。
key是一个函数,接受元素,返回排序依据的值。
# 按字符串长度排序
words = ["apple", "banana", "cherry", "date"]
words.sort(key=lambda x: len(x)) # ['date', 'apple', 'banana', 'cherry']
# 按元组的第二个元素排序
pairs = [(1, 3), (2, 1), (3, 2)]
sorted_pairs = sorted(pairs, key=lambda x: x[1]) # [(2, 1), (3, 2), (1, 3)]2. 多条件排序
- 如果第一个条件相同,按第二个条件排序,依此类推。
# 先按长度排序,长度相同按字母逆序
words = ["apple", "banana", "date", "cherry"]
sorted_words = sorted(words, key=lambda x: (len(x), -ord(x[0])))
# 结果:['date', 'apple', 'cherry', 'banana']3. 逆序的灵活使用
# 按第二个元素降序排序
pairs = [(1, 3), (2, 1), (3, 2)]
sorted_pairs = sorted(pairs, key=lambda x: -x[1]) # [(1, 3), (3, 2), (2, 1)]4. 处理复杂数据结构
# 对字典列表按某个键排序
students = [
{"name": "Alice", "score": 90},
{"name": "Bob", "score": 85},
{"name": "Charlie", "score": 95}
]
sorted_students = sorted(students, key=lambda x: x["score"]) # 按分数升序5. 稳定排序的利用
- 多次排序实现多级排序(先排次要条件,再排主要条件)。
# 先按姓排序,再按名排序(假设原列表已按名排序)
names = [("Alice", "Smith"), ("Bob", "Brown"), ("Charlie", "Smith")]
names.sort(key=lambda x: x[1]) # 先按姓排序
names.sort(key=lambda x: x[0]) # 再按名排序(稳定排序保留姓的顺序)高效技巧(算法优化)
1. 避免重复计算
- 预处理数据以减少
key函数的计算量。
# 预处理:将字符串长度存储为元组
words = ["apple", "banana", "cherry", "date"]
words_with_len = [(len(w), w) for w in words]
words_with_len.sort() # 按长度排序2. 利用切片快速逆序
sorted_nums = sorted(nums)[::-1] # 等效于 reverse=True3. 处理大数据的排序
- 当数据量极大时,优先使用
sorted生成新列表,避免原地修改可能的内存问题。
常见应用场景
1. 区间合并问题
# 按区间起点排序,再合并重叠区间
intervals = [[1,3], [2,6], [8,10], [15,18]]
intervals.sort(key=lambda x: x[0])2. 任务调度(贪心算法)
# 按结束时间排序,选择最早结束的任务
tasks = [(1, 4), (3, 5), (0, 6)]
tasks.sort(key=lambda x: x[1])3. 自定义对象的排序
class Node:
def __init__(self, val, priority):
self.val = val
self.priority = priority
nodes = [Node(3, 2), Node(1, 1), Node(2, 2)]
nodes.sort(key=lambda x: (x.priority, x.val)) # 先按优先级,再按值总结
list.sort():原地排序,无返回值,仅用于列表。sorted():返回新列表,不修改原数据,支持任何可迭代对象。key参数:定义排序规则,结合lambda或自定义函数。- 多条件排序:用元组作为
key,结合稳定排序特性。
本文参与 腾讯云自媒体同步曝光计划,分享自作者个人站点/博客。
原始发表:2025-03-01,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号