ROS学习——第1讲 ROS概述及环境搭建
原创

在文章开始之前,推荐一篇值得阅读的好文章!感兴趣的也可以去看一下,并关注作者!
题目:HarmonyOS 应用中复杂业务场景下的接口设计
好事文章地址:https://cloud.tencent.com/developer/article/2469534
在开发复杂业务应用时,接口设计不仅需要满足业务功能,还要考虑通用性和高效性。对于多业务耦合场景,接口如何灵活扩展、避免过度设计,同时保证数据传输的高效,是开发者需要解决的重要问题。本文结合 HarmonyOS 的开发实践,分享如何针对复杂业务场景设计高扩展性、低耦合的接口。

引出
ROS学习——第1讲 ROS概述及环境搭建
第1讲 ROS概述及环境搭建
Ros的安装
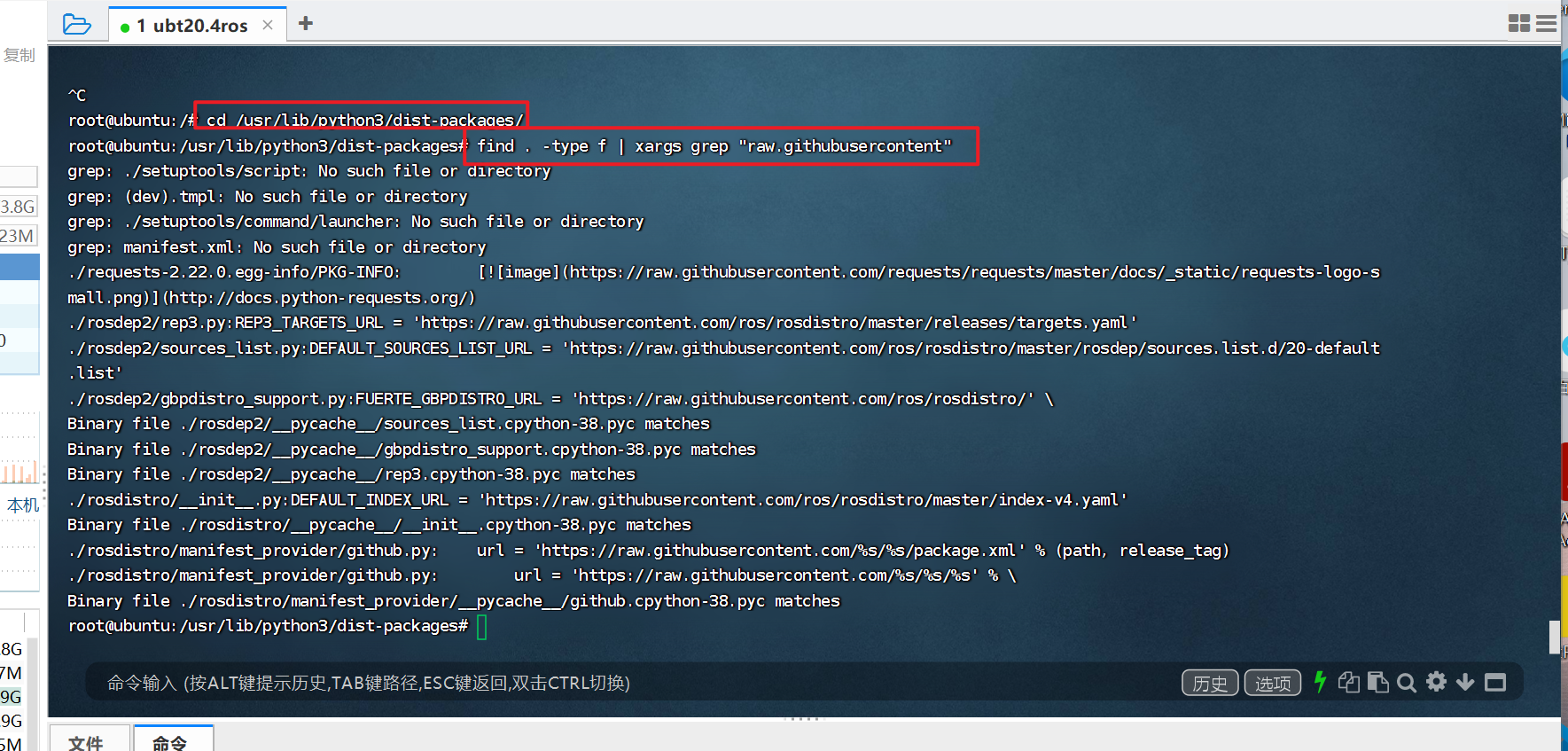
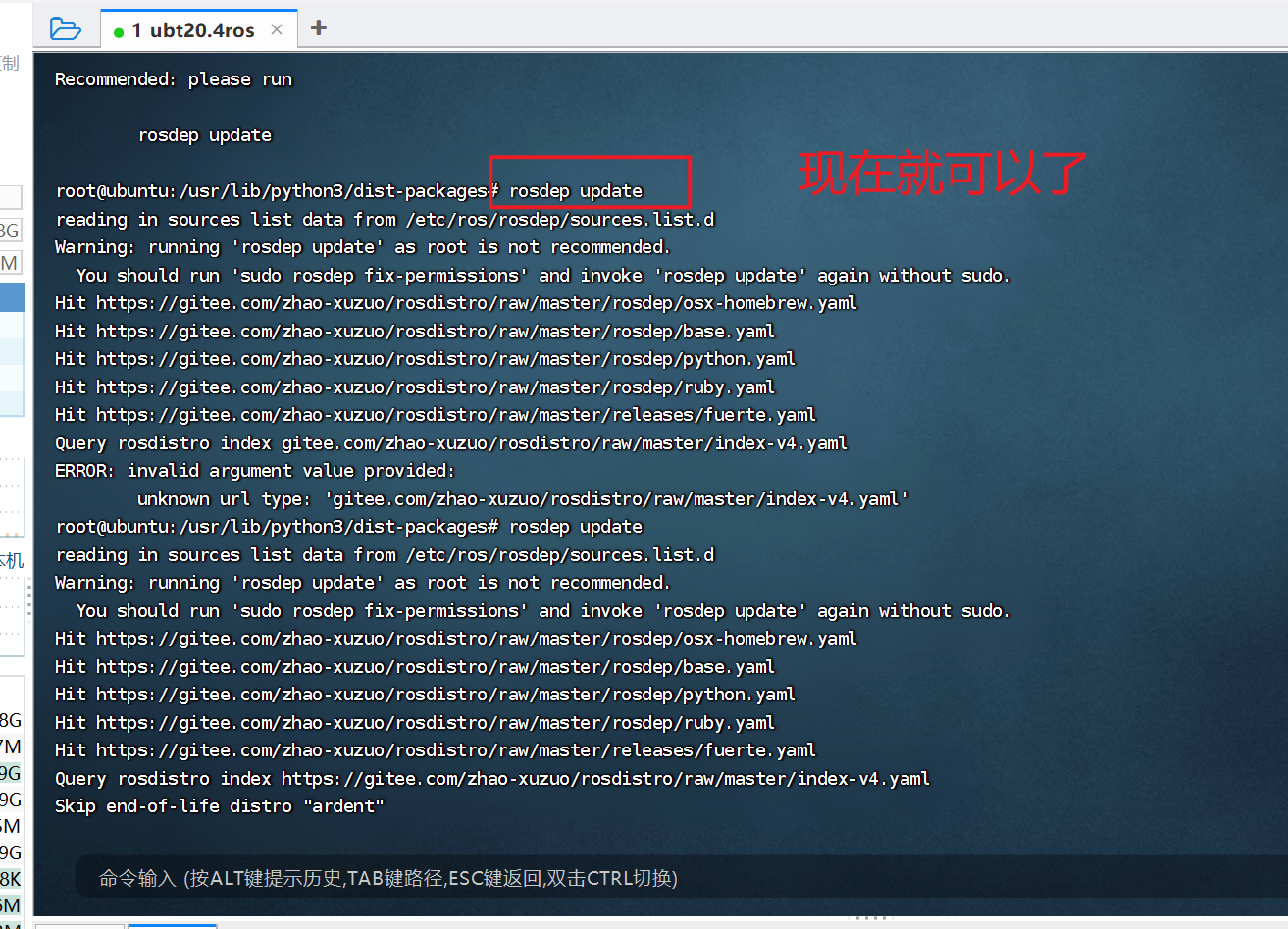
root@ubuntu:/# cd /usr/lib/python3/dist-packages/
root@ubuntu:/usr/lib/python3/dist-packages# find . -type f | xargs grep "raw.githubusercontent"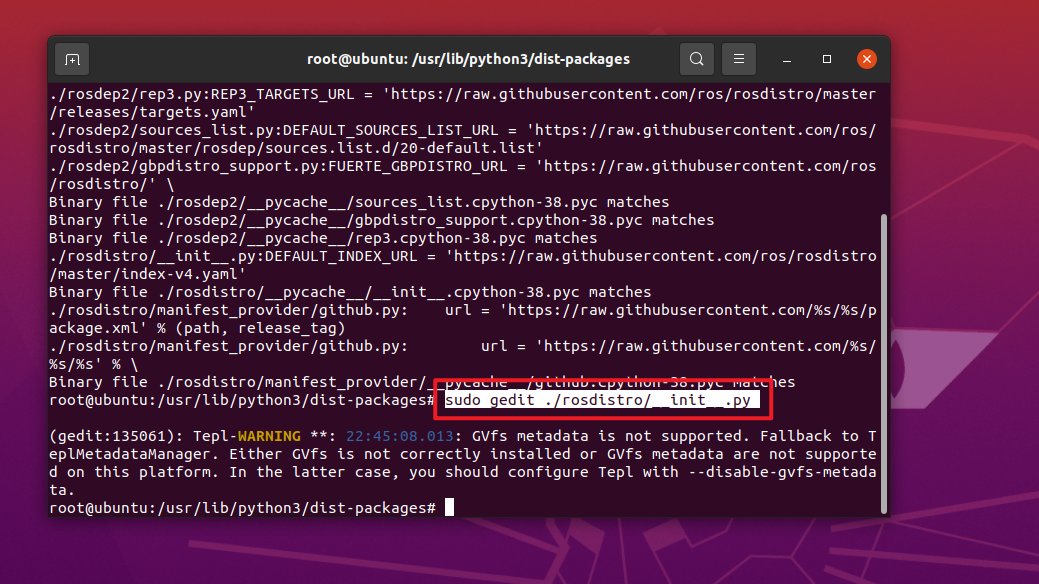
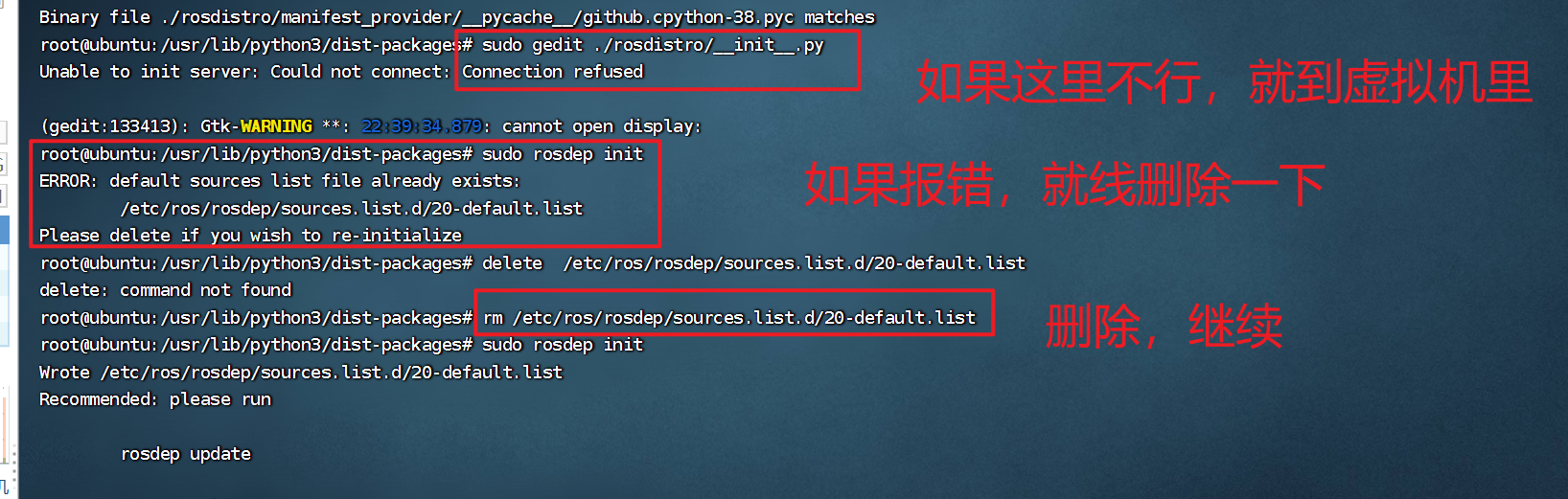
sudo gedit ./rosdistro/__init__.py
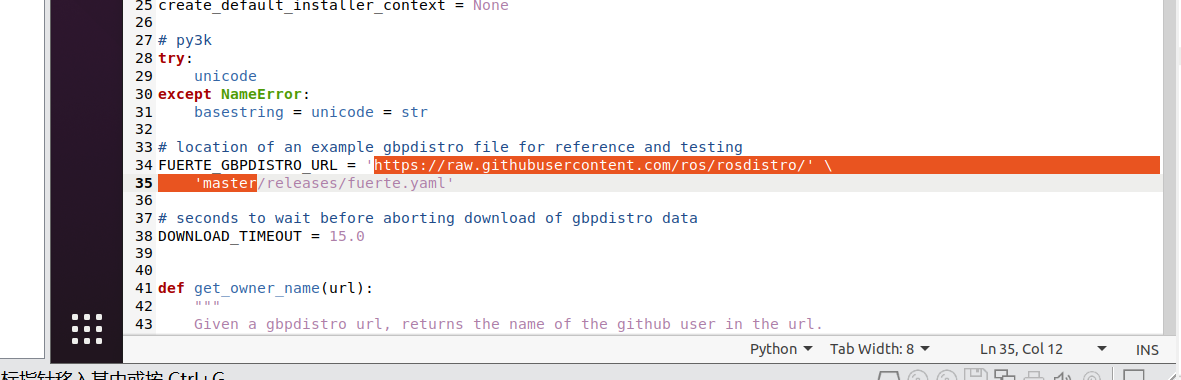
sudo gedit ./rosdep2/gbpdistro_support.py
sudo gedit ./rosdep2/sources_list.py
sudo gedit ./rosdep2/rep3.py
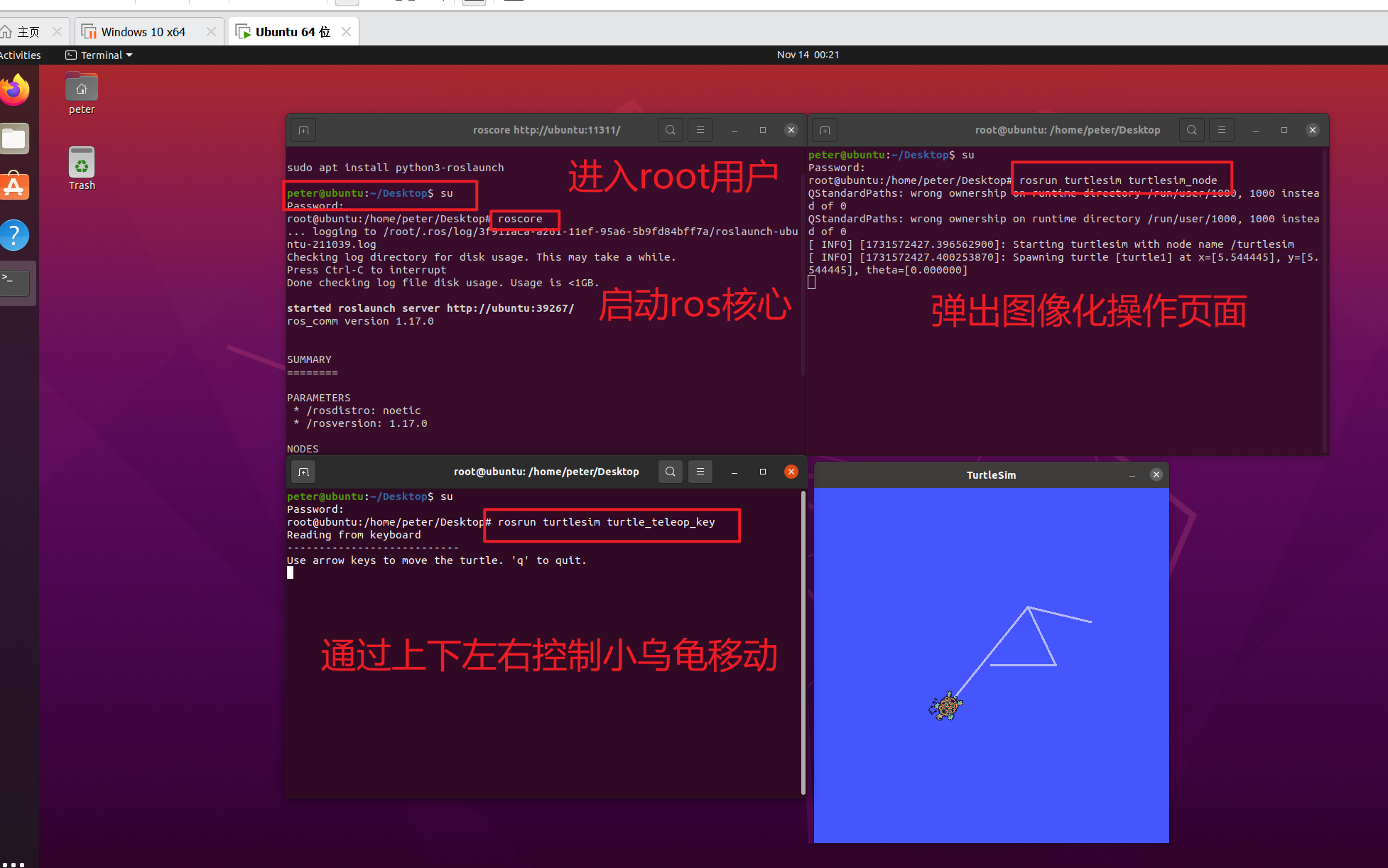
Ros测试
ROS 内置了一些小程序,可以通过运行这些小程序以检测 ROS 环境是否可以正常运行
- 首先启动三个命令行(ctrl + alt + T)
- 命令行1键入:roscore
- 命令行2键入:rosrun turtlesim turtlesim_node(此时会弹出图形化界面)
- 命令行3键入:rosrun turtlesim turtle_teleop_key(在3中可以通过上下左右控制2中乌龟的运动)
如何进入root用户
如果没有在root用户下,会出现很多奇奇怪怪的问题,包括不限于ros运行不起来,得切换su,vs编译命令报错等,所以最好开始登录就进入root用户
Ubuntu 20.04使用root身份自动登录_ubuntu20.04root登录-CSDN博客
sudo gedit /usr/share/lightdm/lightdm.conf.d/50-ubuntu.conf
sudo gedit /etc/pam.d/gdm-autologin
sudo gedit /etc/pam.d/gdm-password
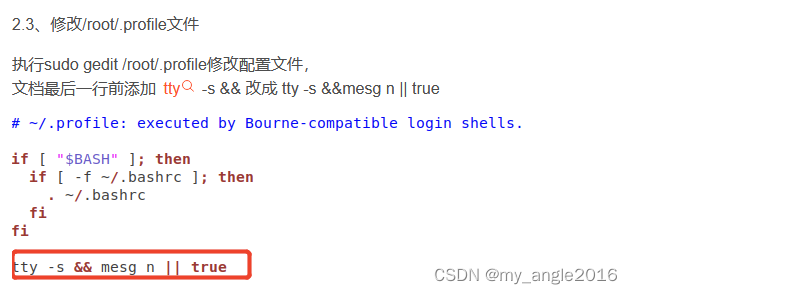
sudo gedit /root/.profile
tty -s &&mesg n || true
sudo gedit /etc/gdm3/custom.conf
user-session=ubuntu
#手工输入登陆系统的用户名和密码
greeter-show-manual-login=true
#禁用guest用户
all-guest=false
#启动后以root身份自动登录
autologin-user=root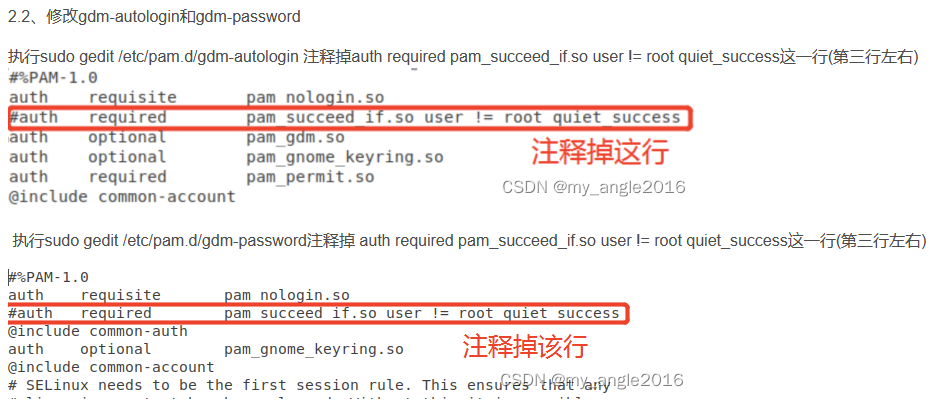

HelloWorld程序
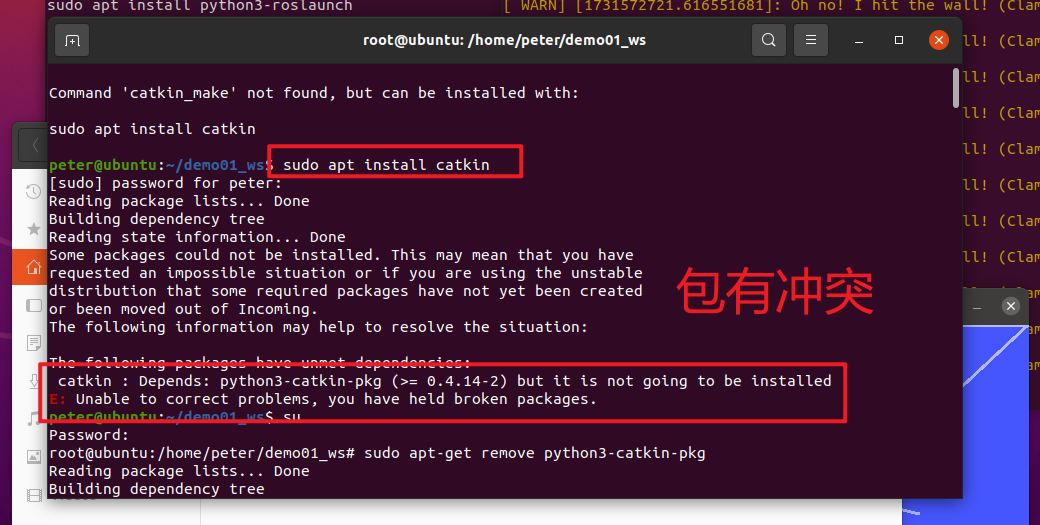
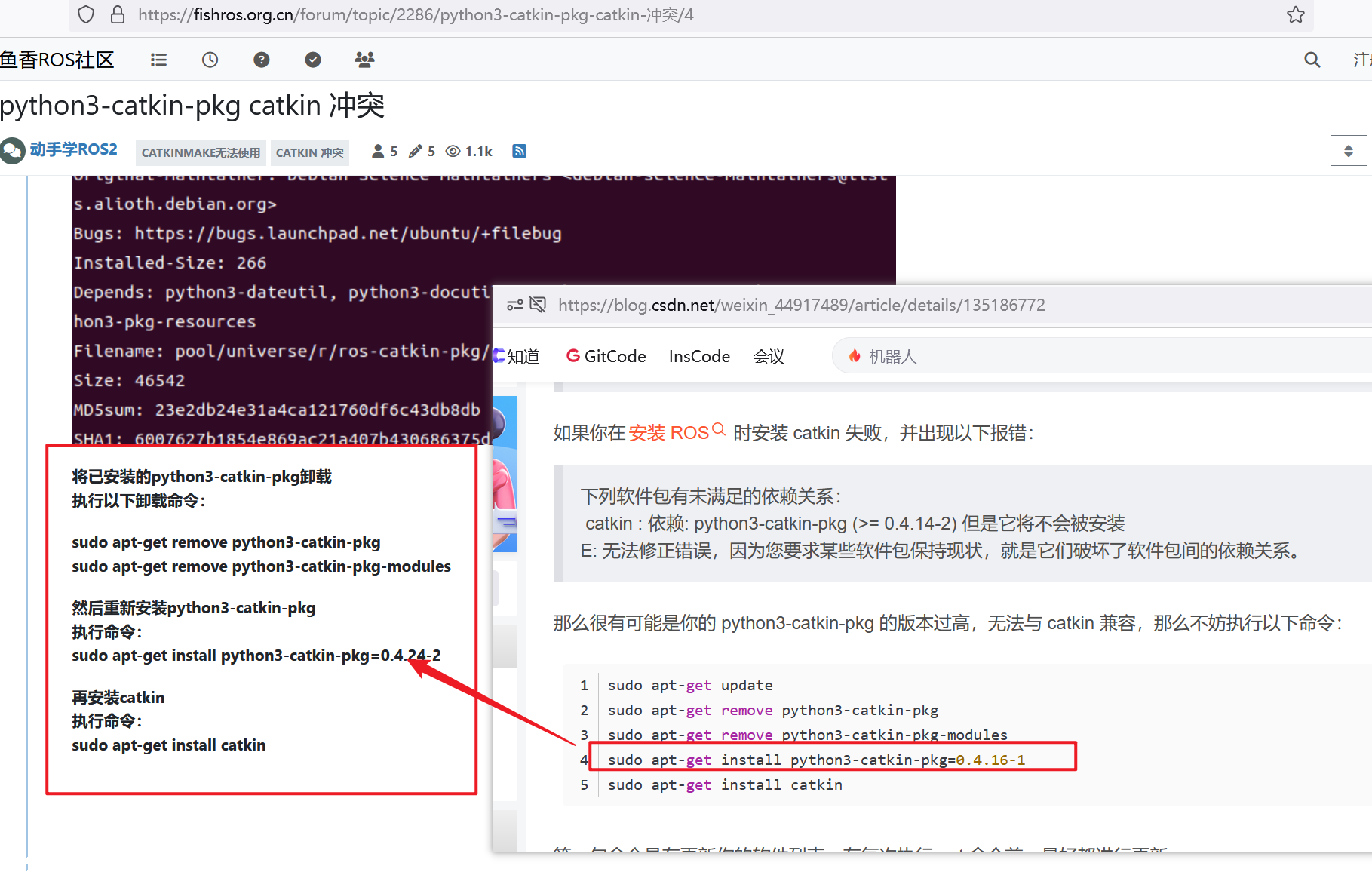
包冲突解决
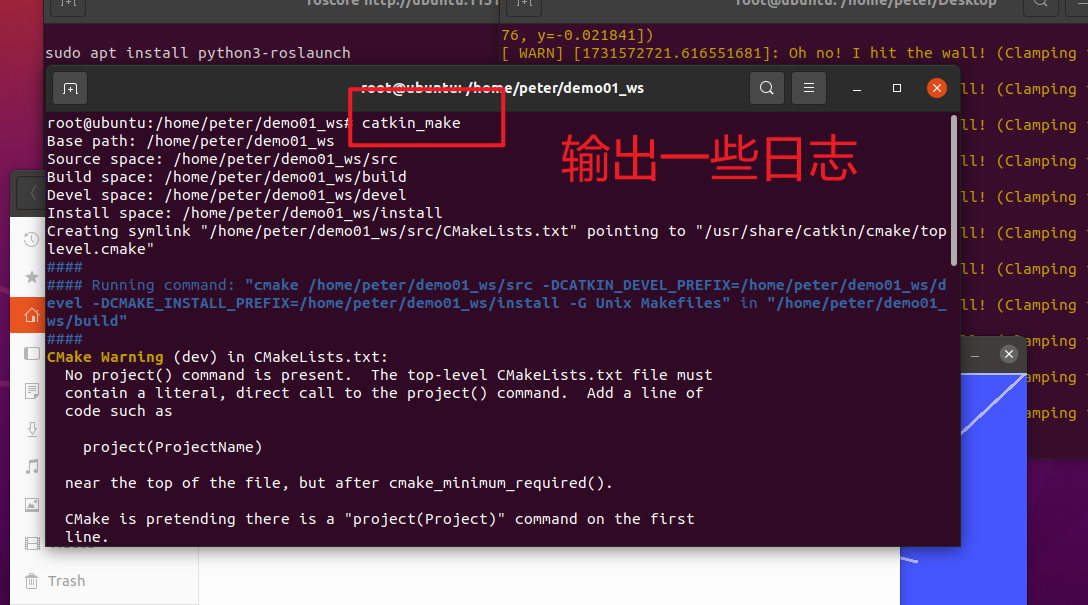
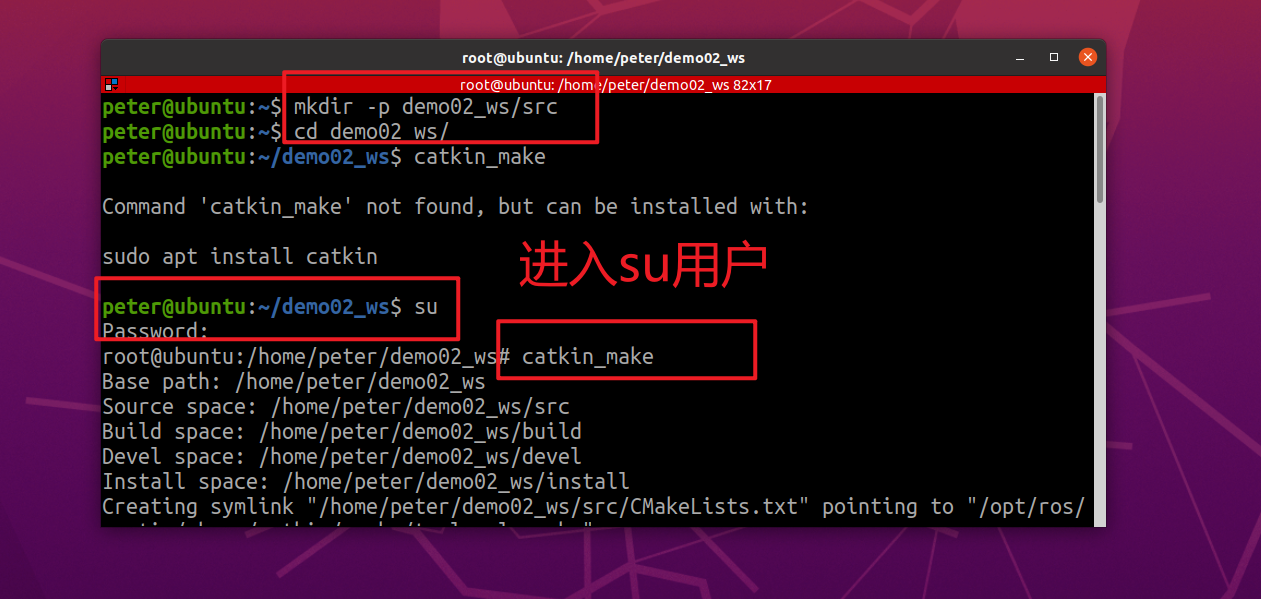
创建文件目录,catkin_make
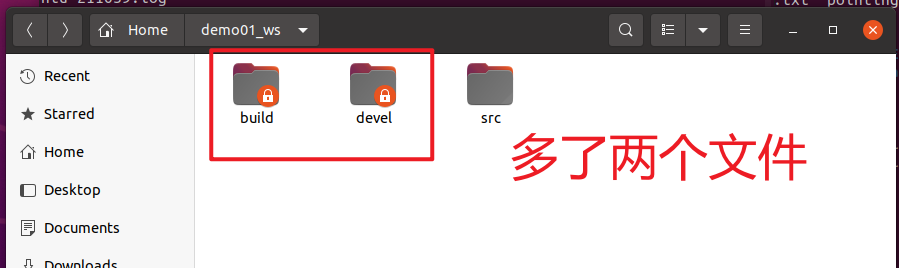
创建工作空间
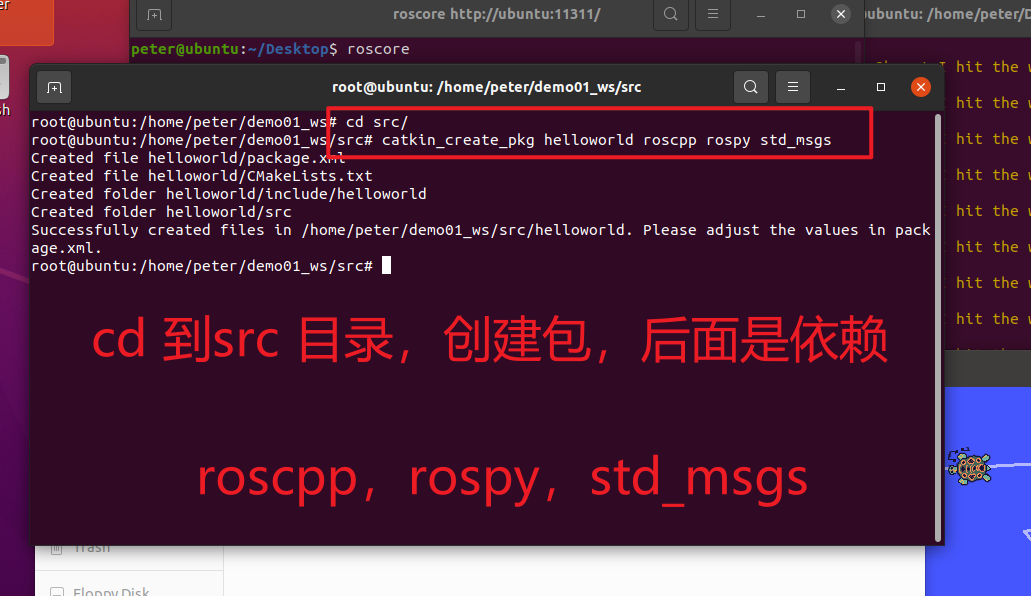
root@ubuntu:/home/peter/demo01_ws# cd src/
root@ubuntu:/home/peter/demo01_ws/src# catkin_create_pkg helloworld roscpp rospy std_msgs上述命令,会在工作空间下生成一个功能包,该功能包依赖于 roscpp、rospy 与 std_msgs,其中roscpp是使用C++实现的库,而rospy则是使用python实现的库,std_msgs是标准消息库,创建ROS功能包时,一般都会依赖这三个库实现。
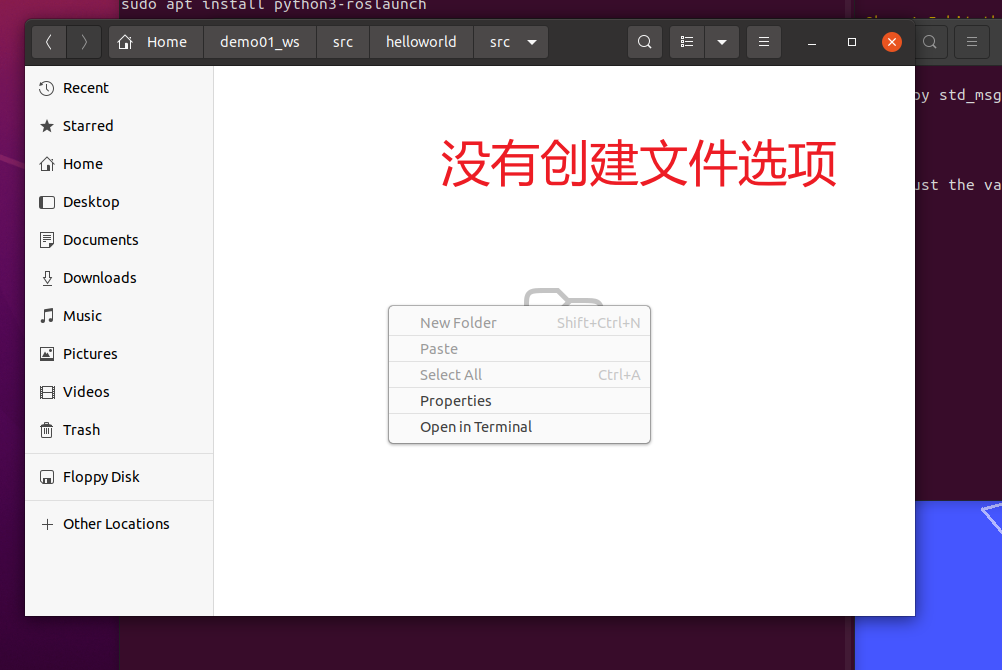
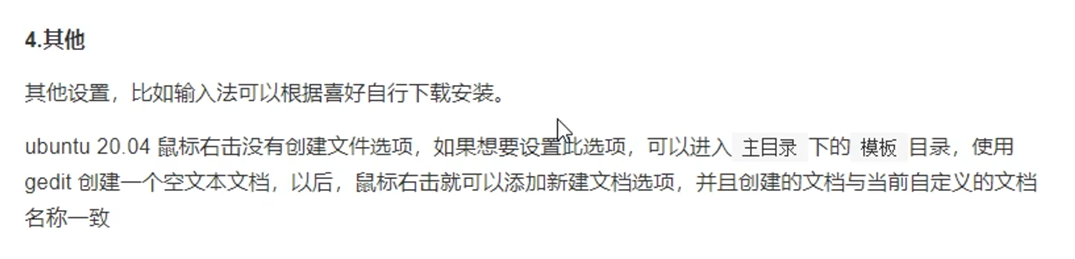
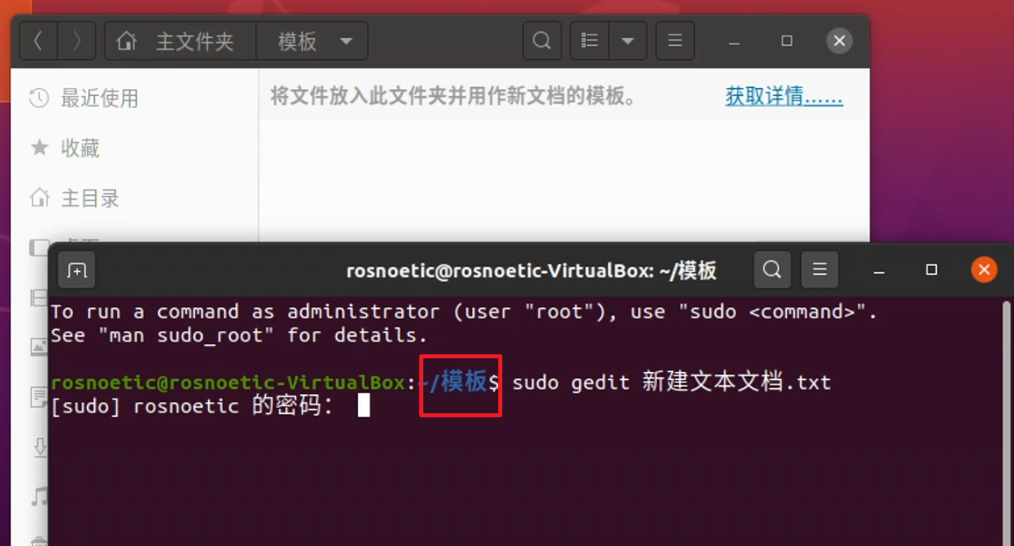
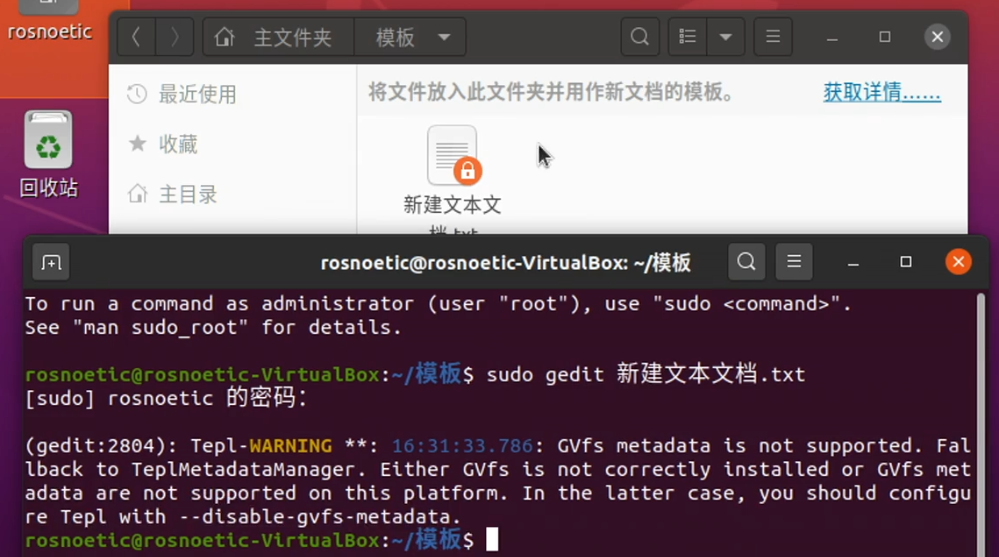
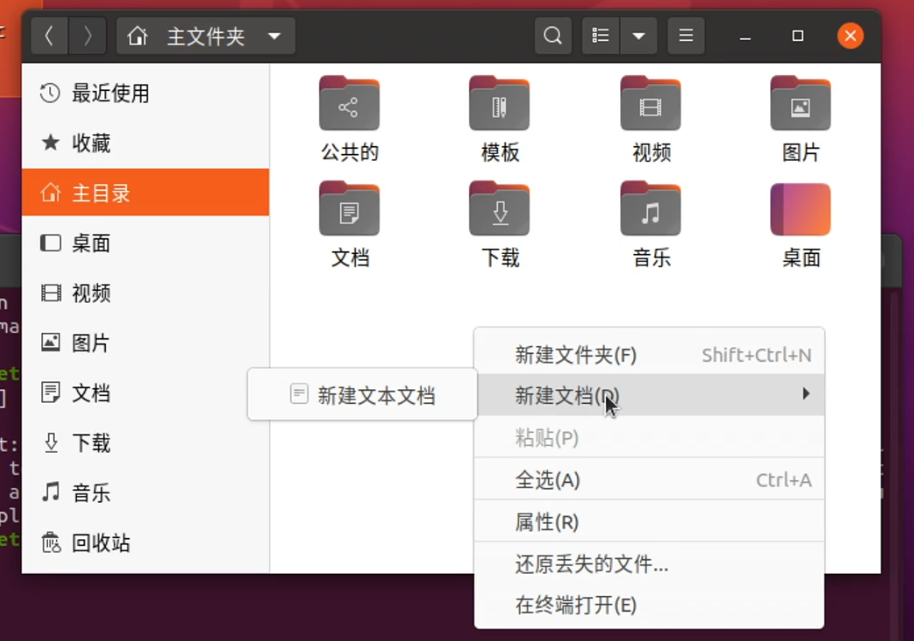
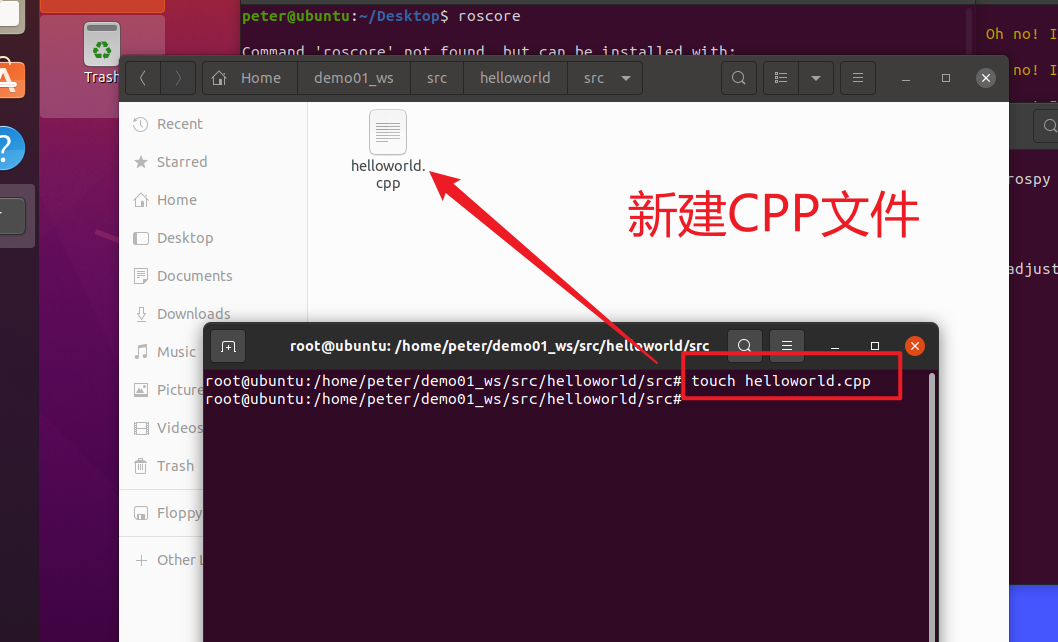
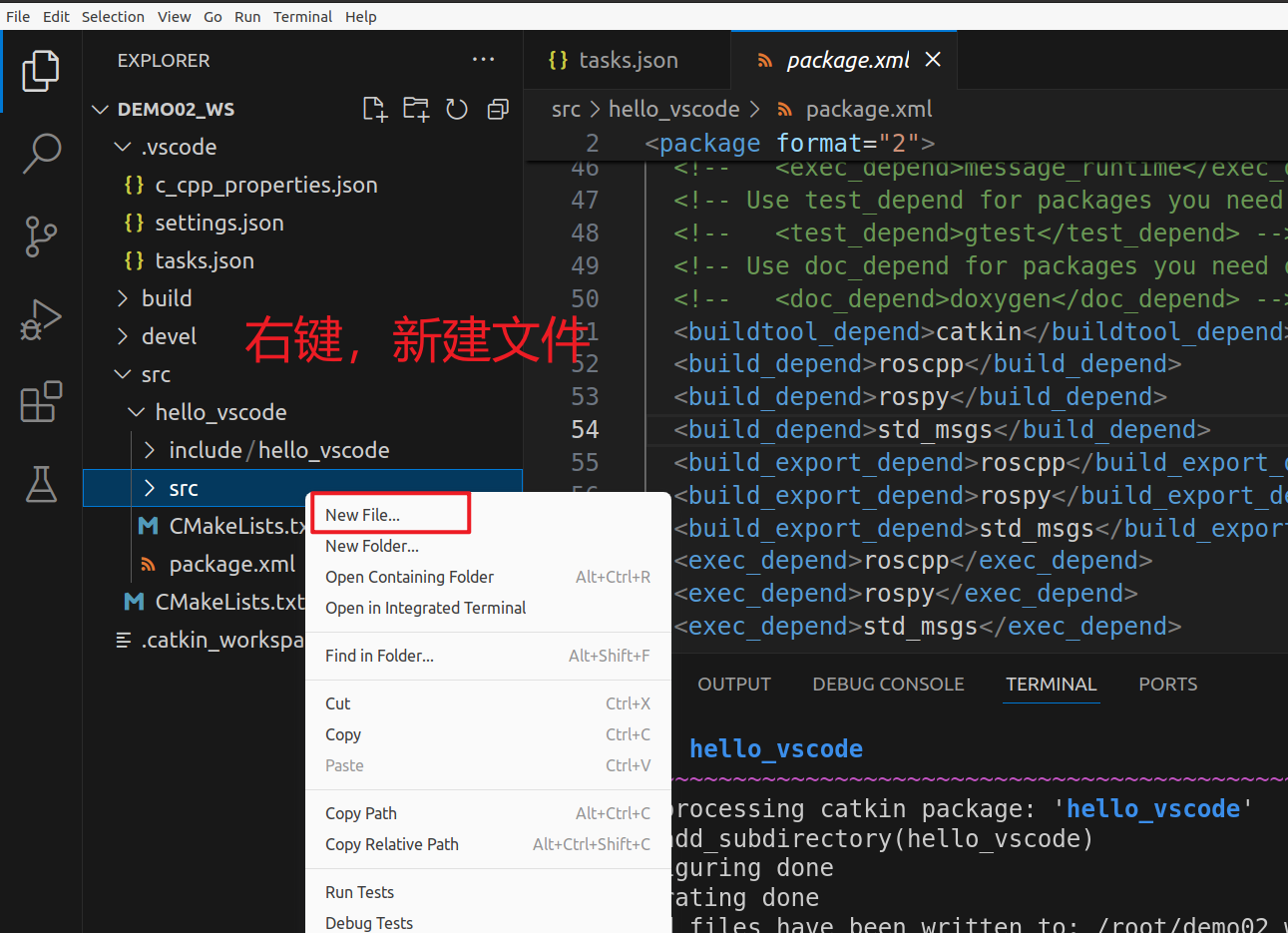
解决:没有新建文件选项
C++的实现
编写源文件
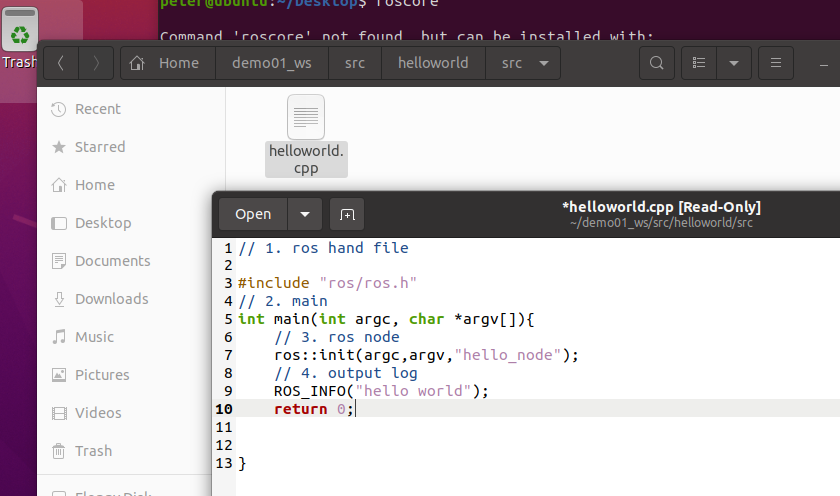
// 1. ros hand file
#include "ros/ros.h"
// 2. main
int main(int argc, char *argv[]){
// 3. ros node
ros::init(argc,argv,"hello_node");
// 4. output log
ROS_INFO("hello world");
return 0;
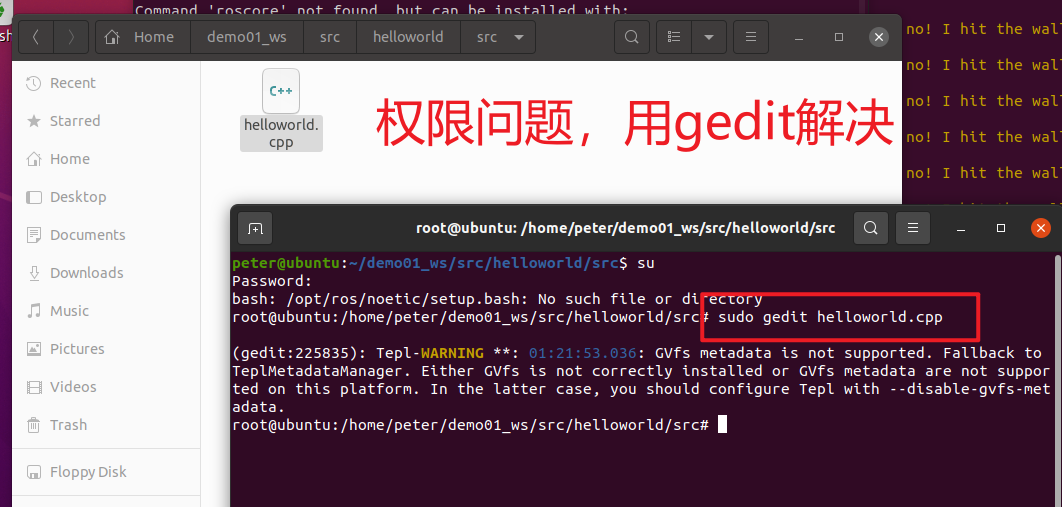
}关于 permissions necessary to save
Could not save the file "/home/peter/demo01_ws/sr...oworld/src/helloworld.cpp". You do not have the permissions necessary to save the file.Please check that you typed the location correctly and try again. 1//1
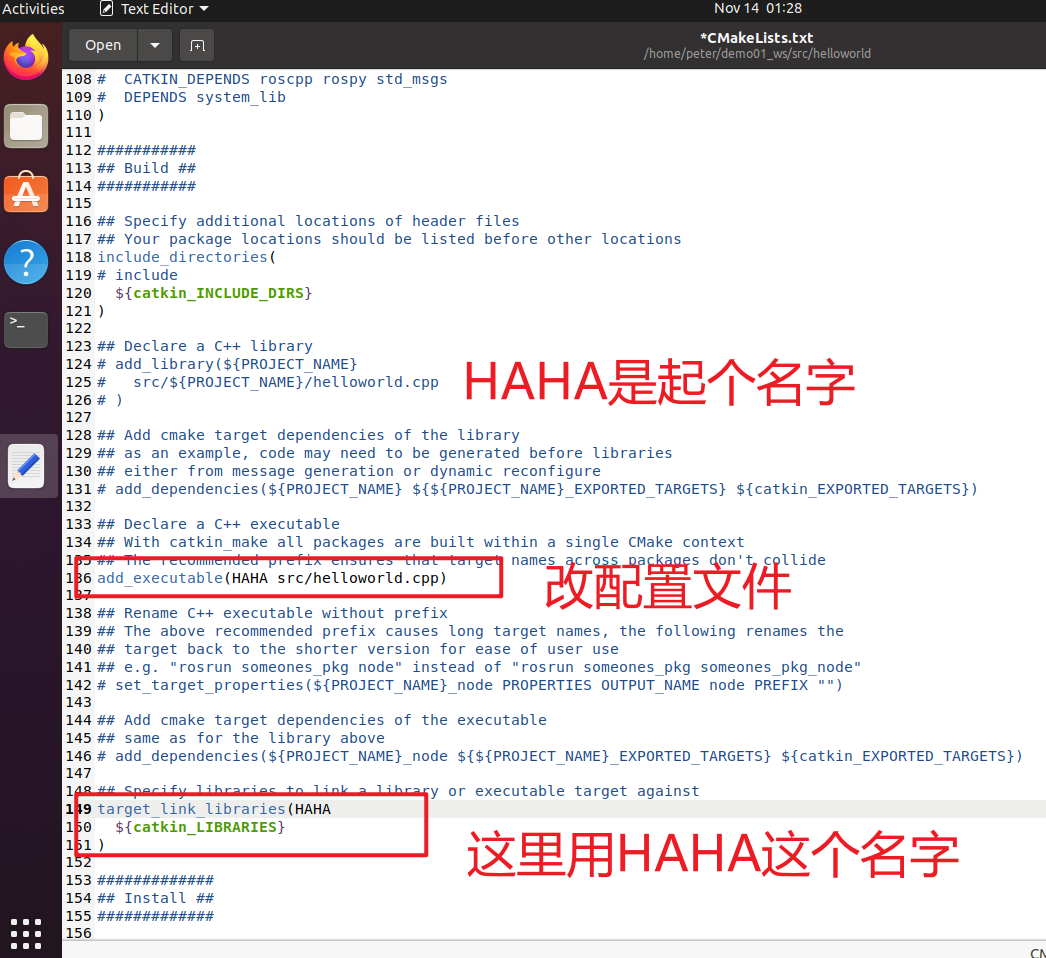
修改配置文件
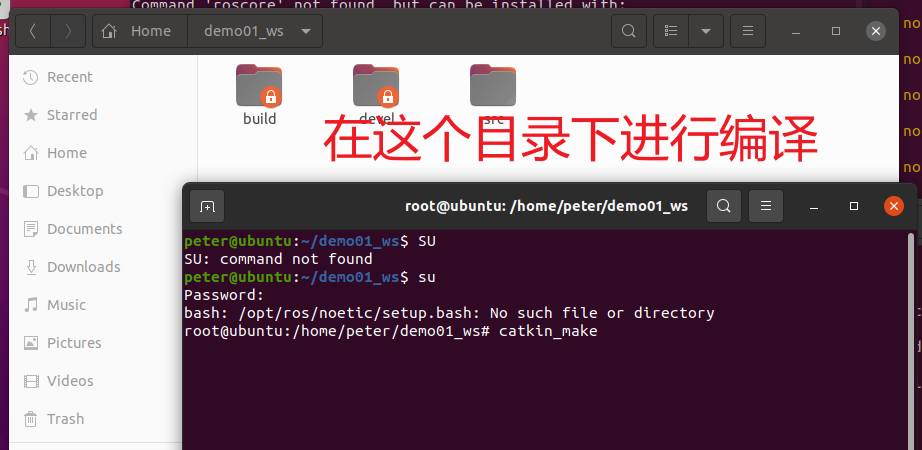
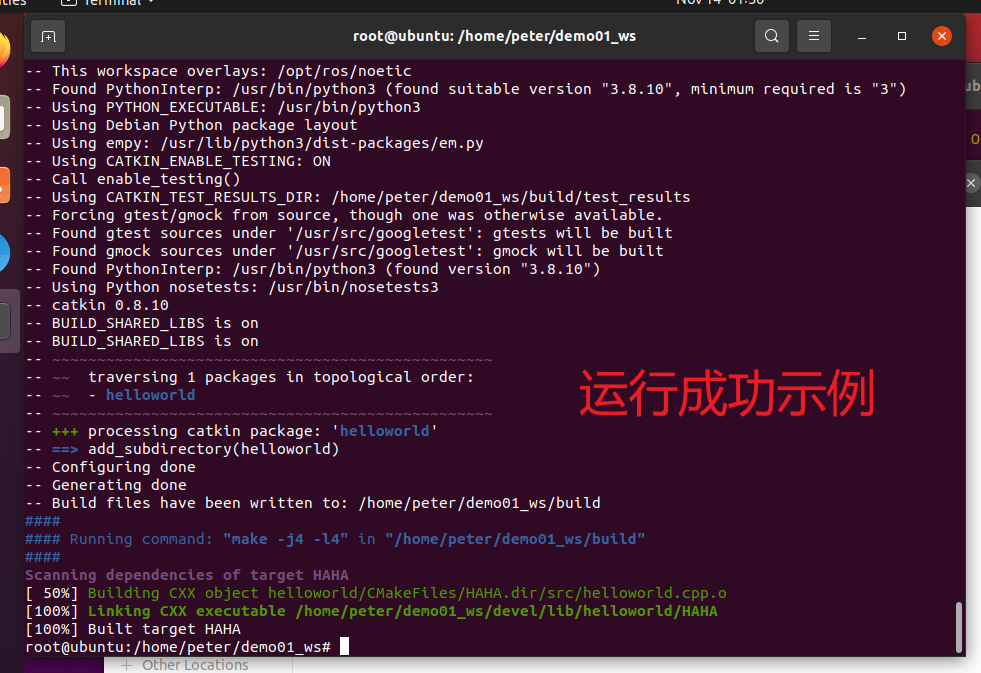
进行编译
报错解决:
没有roscpp
CMake Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "roscpp" with any
of the following names:
roscppConfig.cmake
roscpp-config.cmake
没有rospy
CMake Error at /usr/share/catkin/cmake/catkinConfig.cmake:82 (find_package):
Could not find a package configuration file provided by "rospy" with any of
the following names:
rospyConfig.cmake
rospy-config.cmake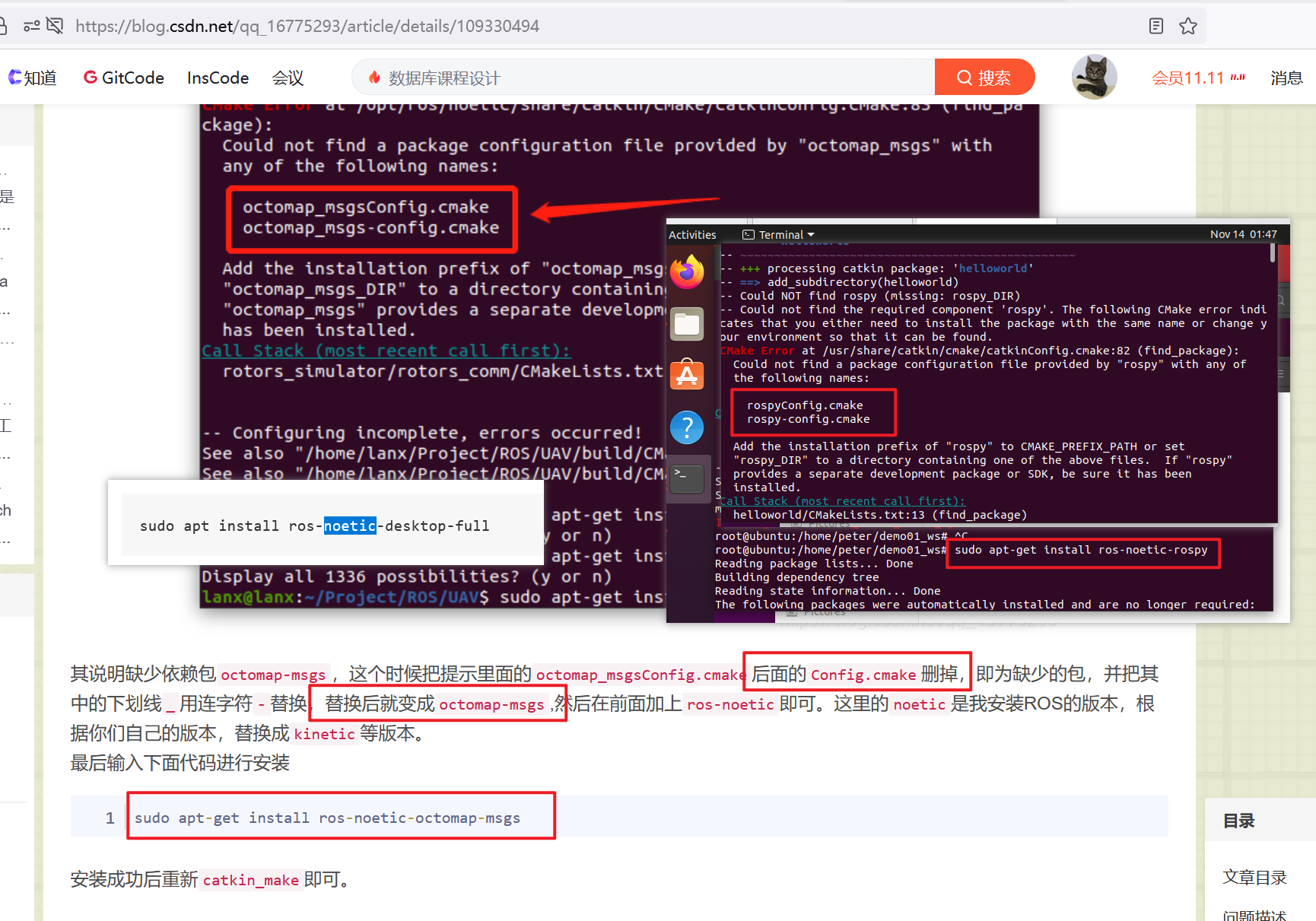
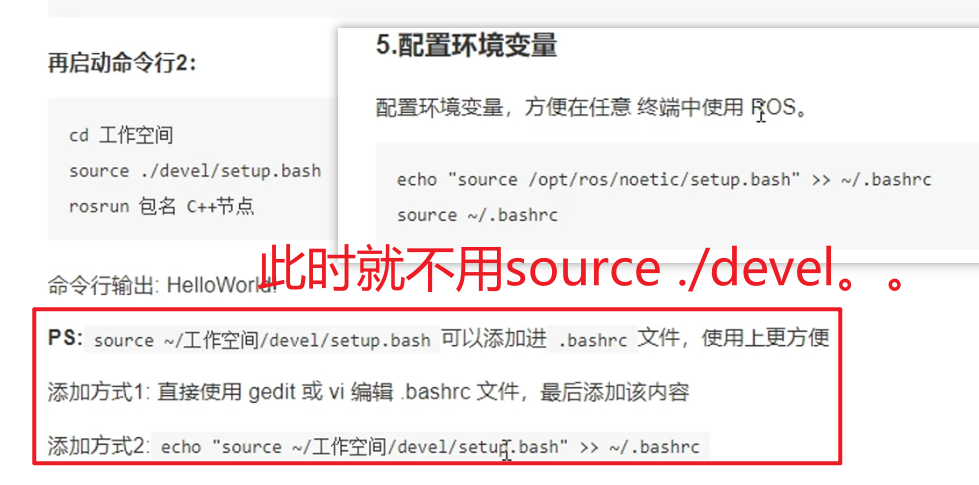
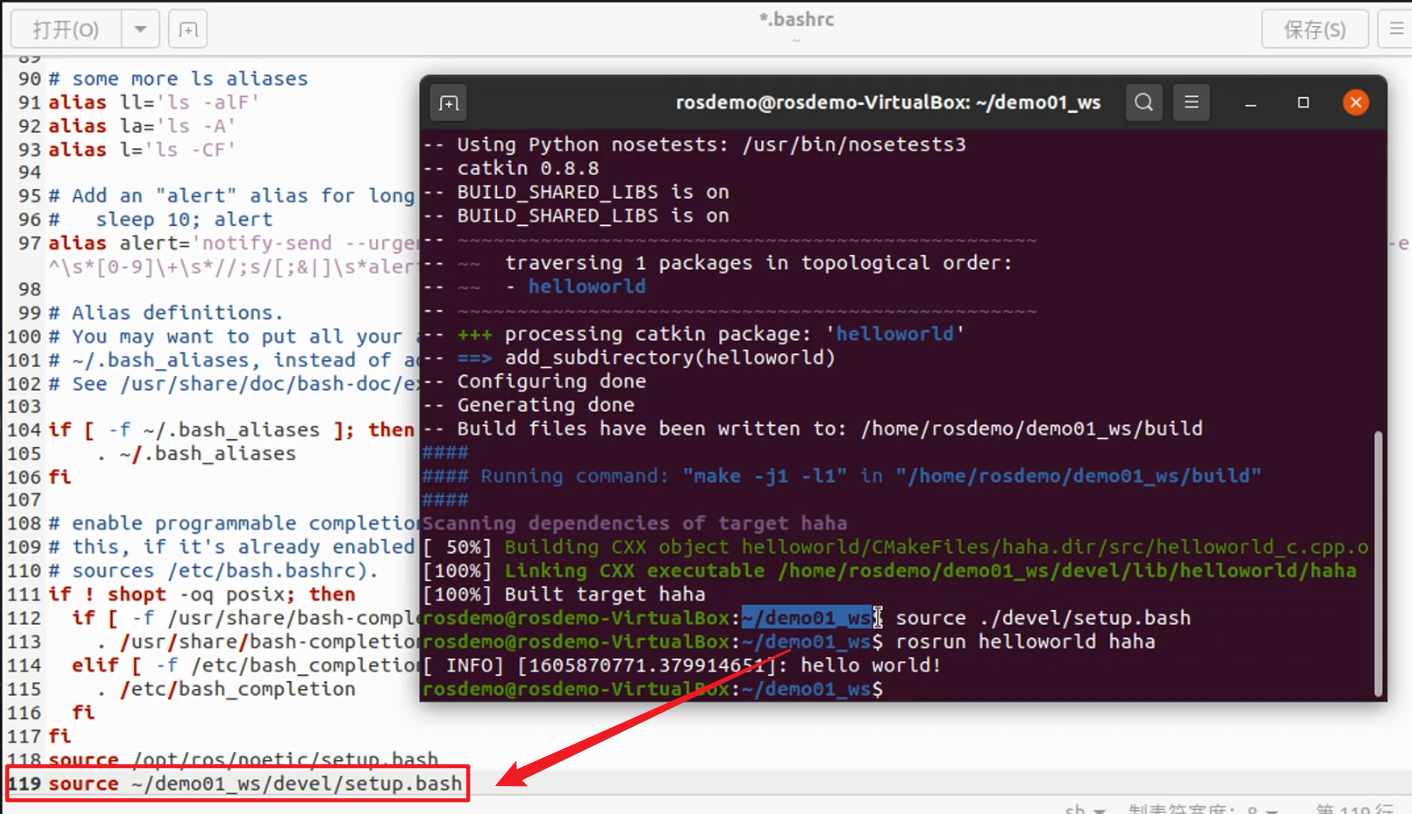
进行运行
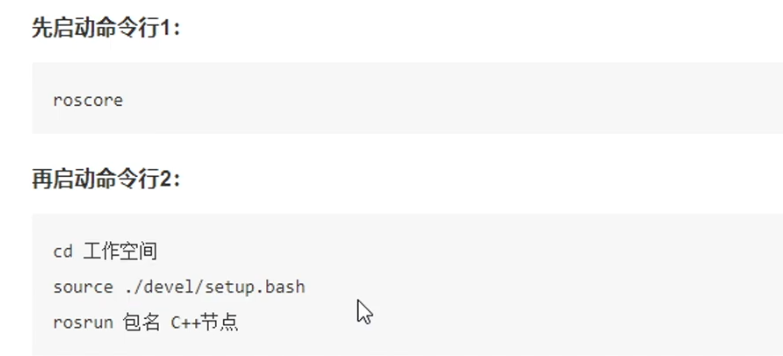
cd 工作空间
source ./devel/setup.bash
rosrun 包名 C++节点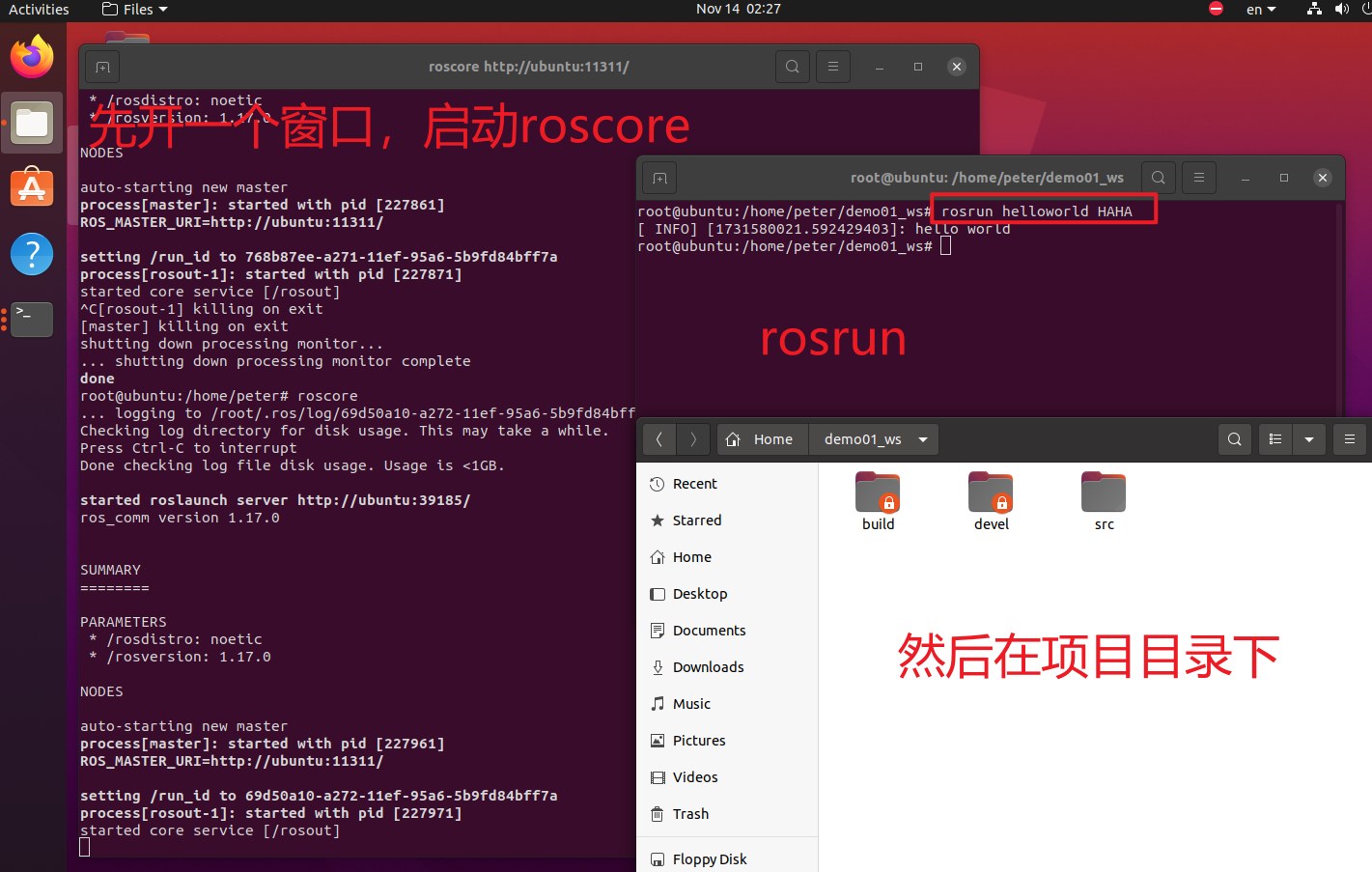
报错解决
python3-roslaunch
E: Unmet dependencies. Try 'apt --fix-broken install' with no packages (or specify a solution).
root@ubuntu:/home/peter# roscore
Command 'roscore' not found, but can be installed with:
apt install python3-roslaunch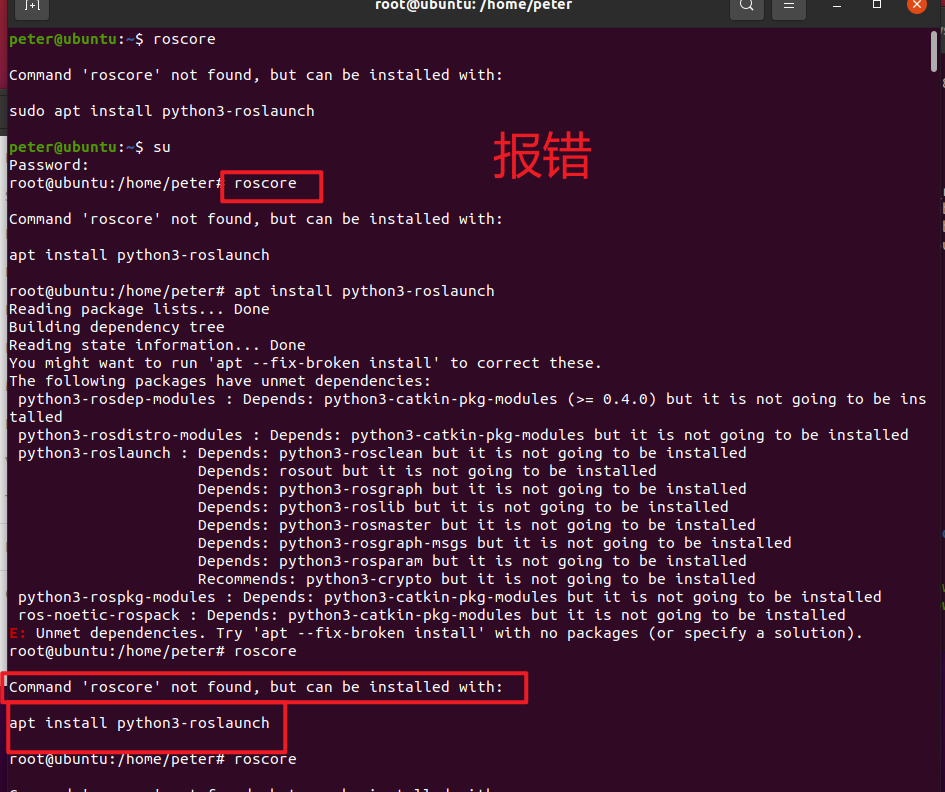
python3-catkin-pkg-modules_1.0.0-1_all.deb
Errors were encountered while processing:
/var/cache/apt/archives/python3-catkin-pkg-modules_1.0.0-1_all.deb
E: Sub-process /usr/bin/dpkg returned an error code (1)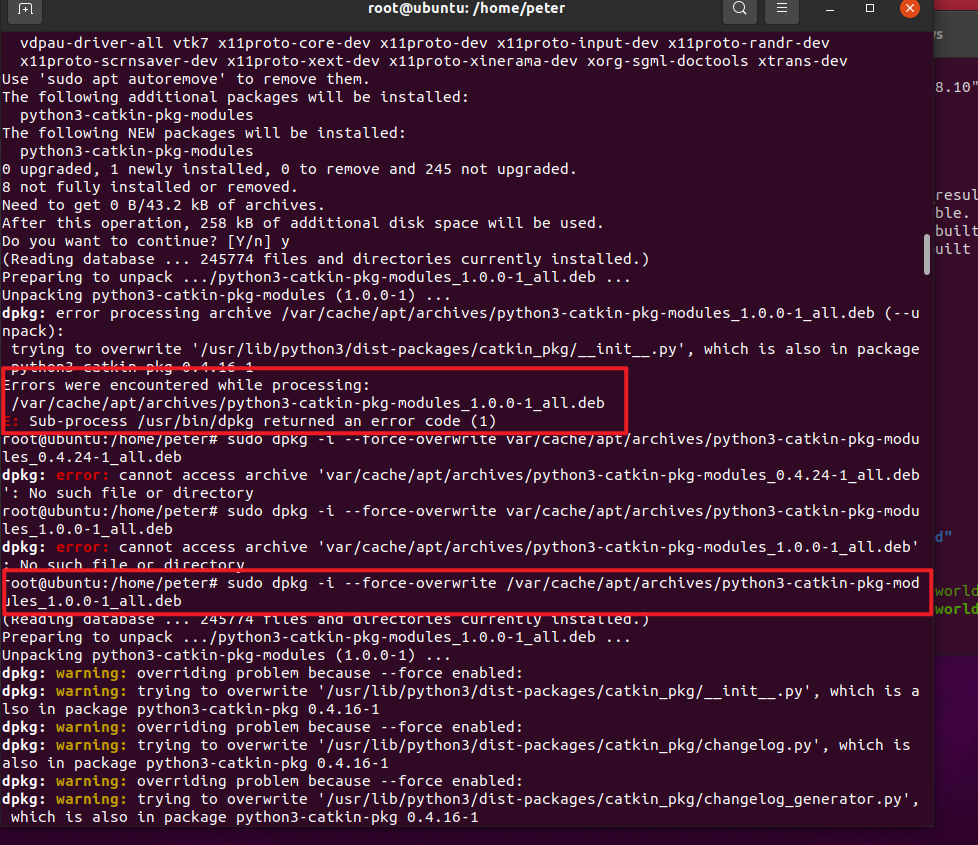
Resource not found: roslaunch
ROS path [0]=/opt/ros/noetic/share/ros
ROS path [1]=/opt/ros/noetic/share
The traceback for the exception was written to the log file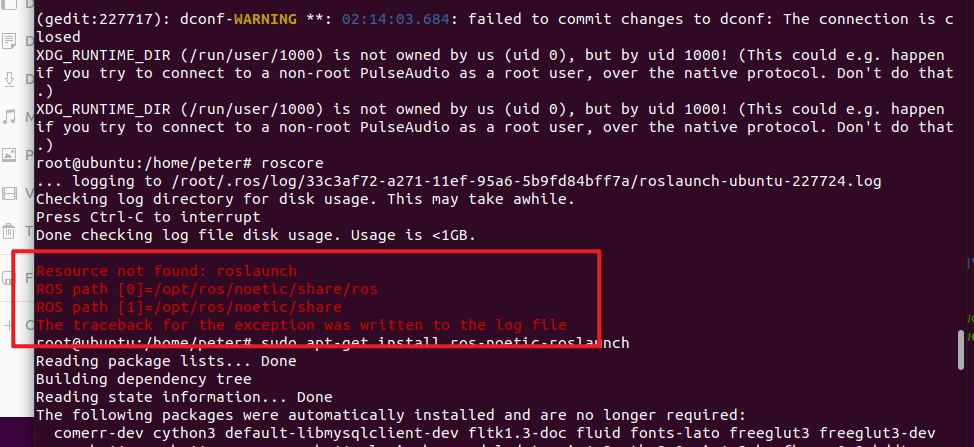
sudo apt-get install ros-noetic-roslaunch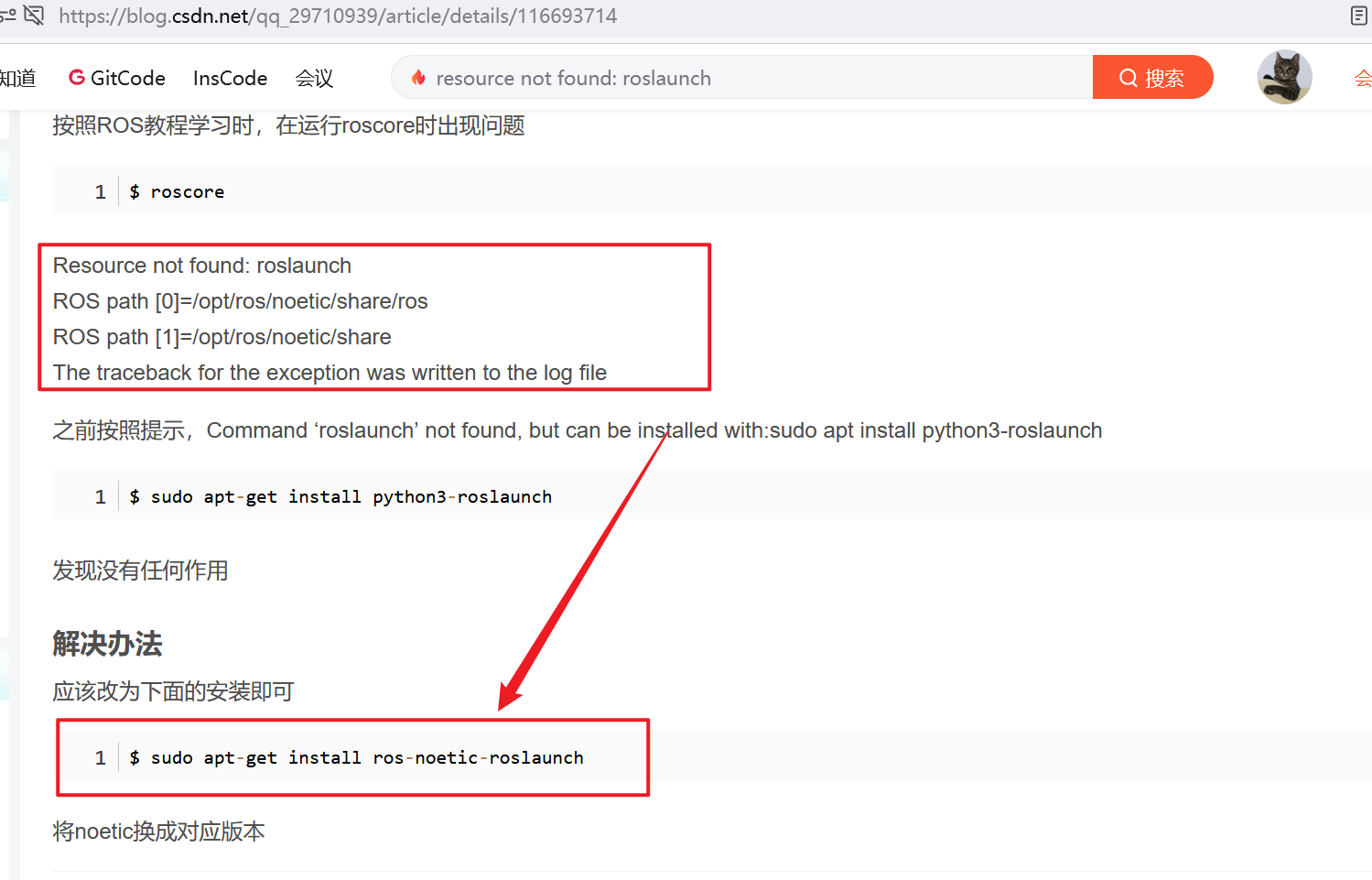
… logging to /home/gm/.ros/log/24112dc4-6213-11e9-87a9-98541bdb0e48/roslaunch-gm-Lenovo-ideapad-4266.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB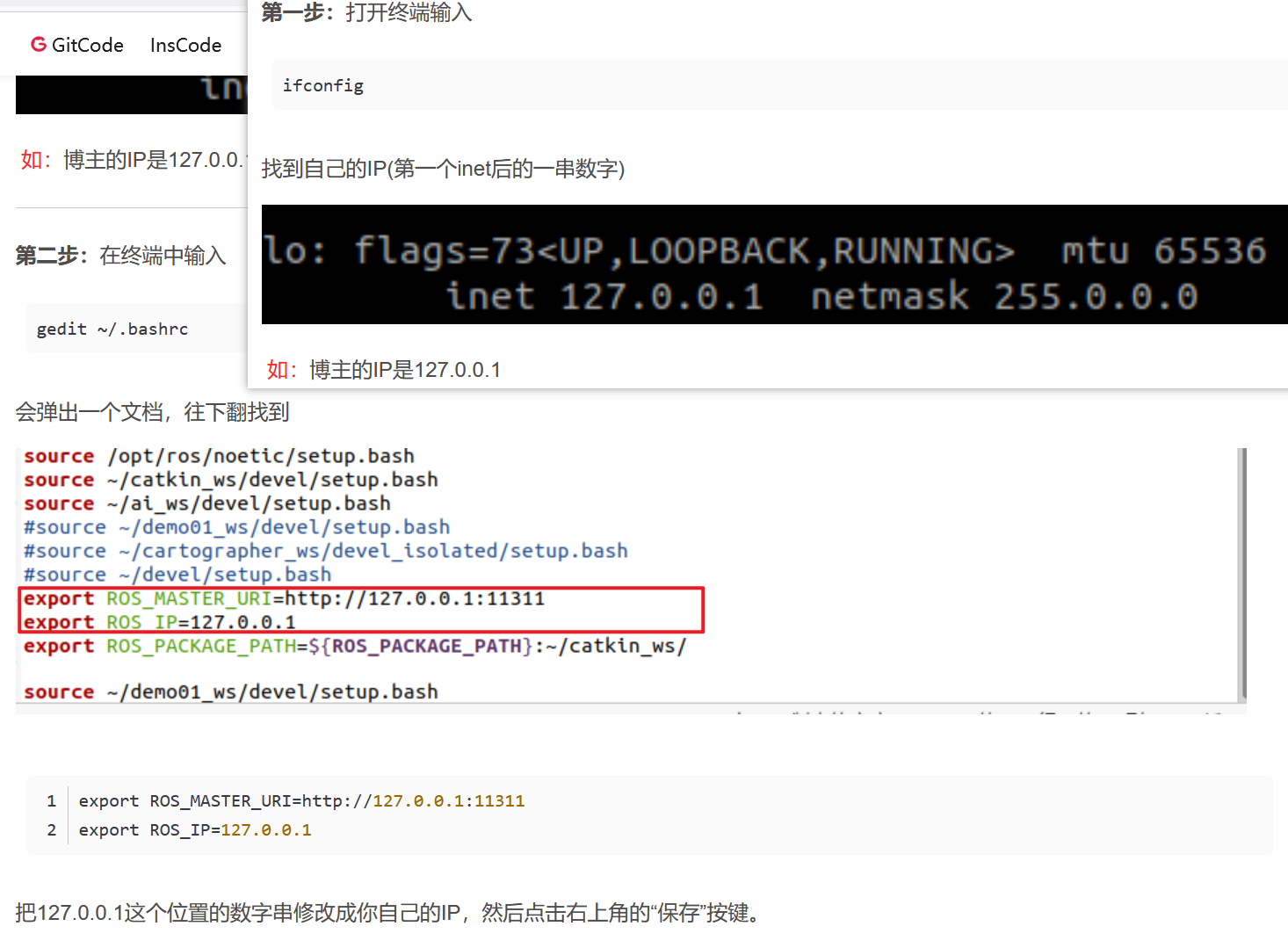
https://blog.csdn.net/qq_50942093/article/details/126998638
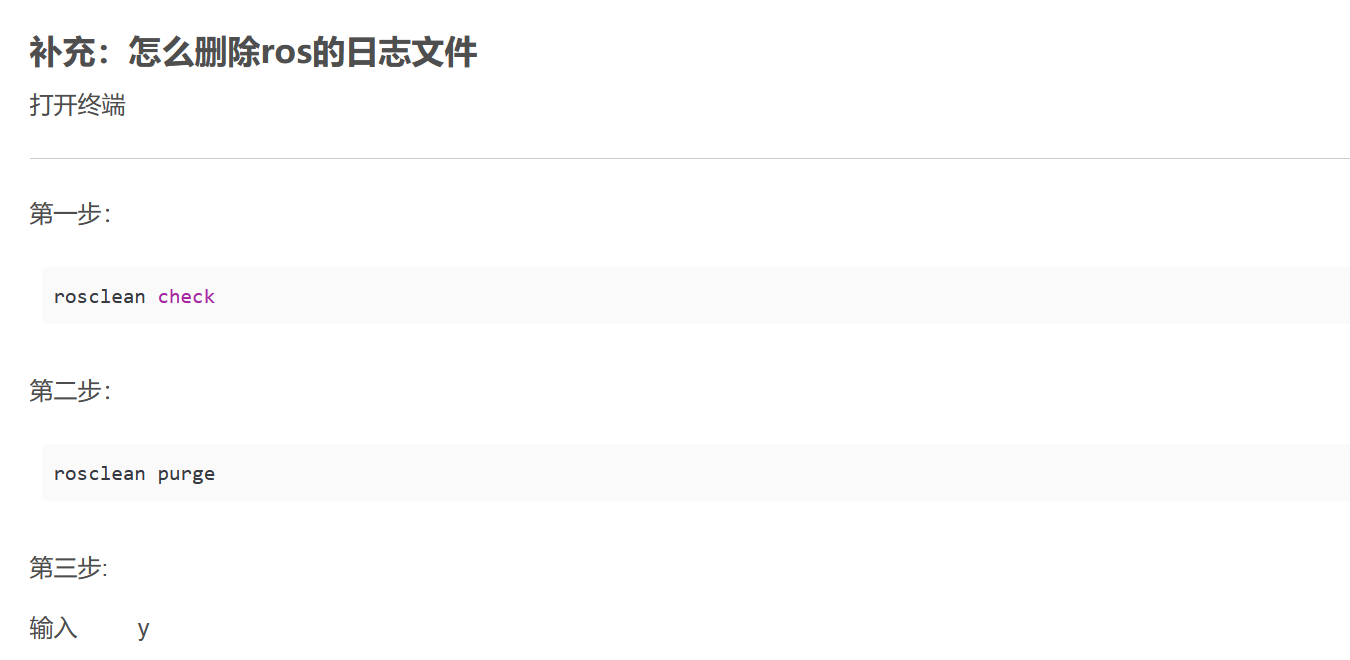
rosclean check
rosclean purgeroot@ubuntu:/home/peter/demo01_ws# rosrun helloworld HAHA
Command 'rosrun' not found, but can be installed with:
apt install rosbash
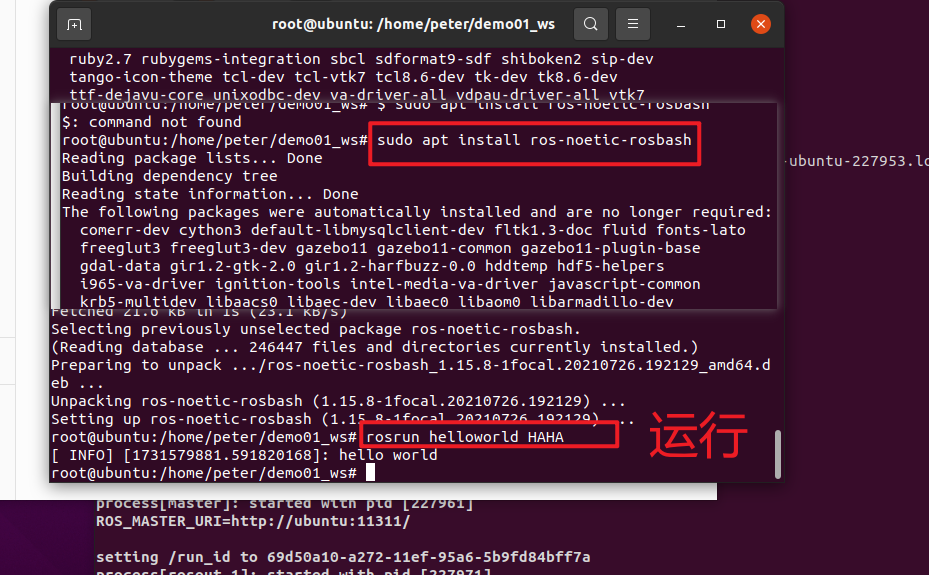
任意地方都能运行


Pyhton实现
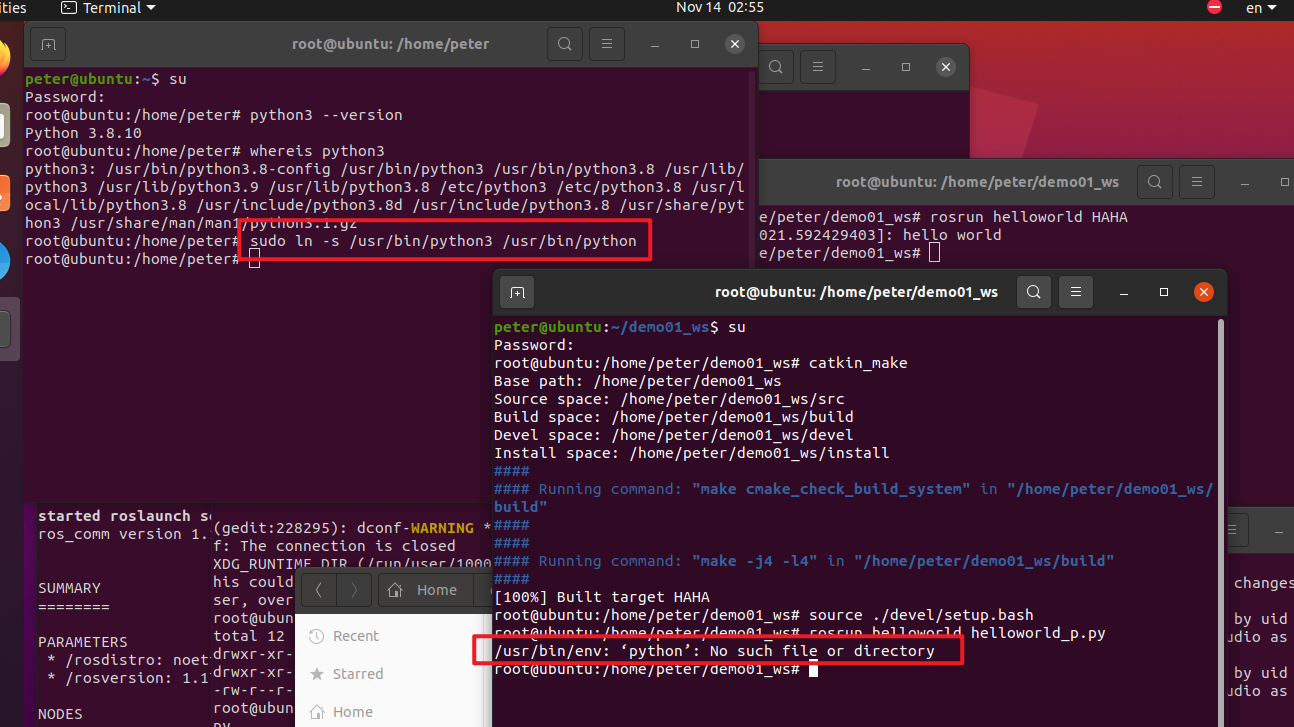
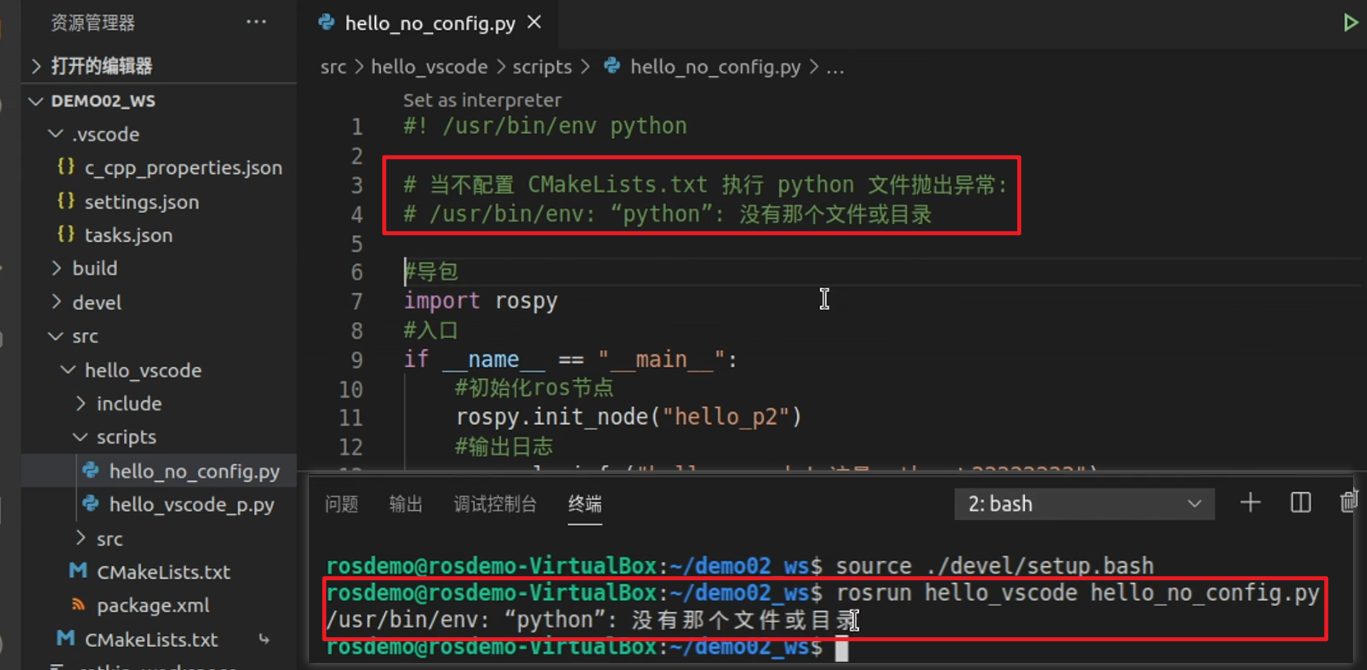
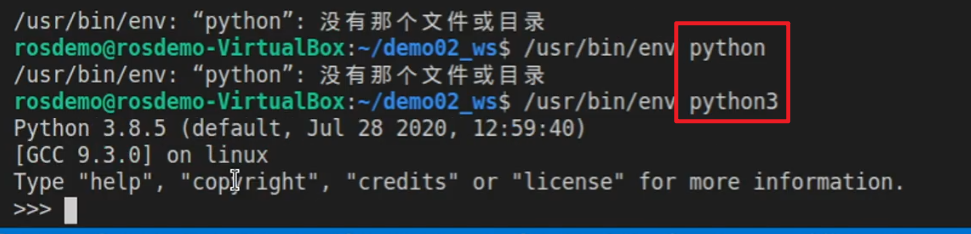
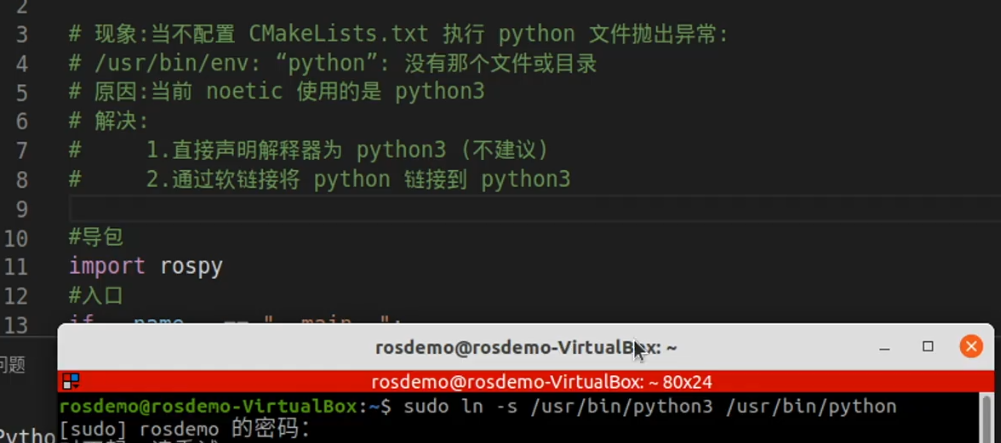
报错解决:python 软连接到Python3
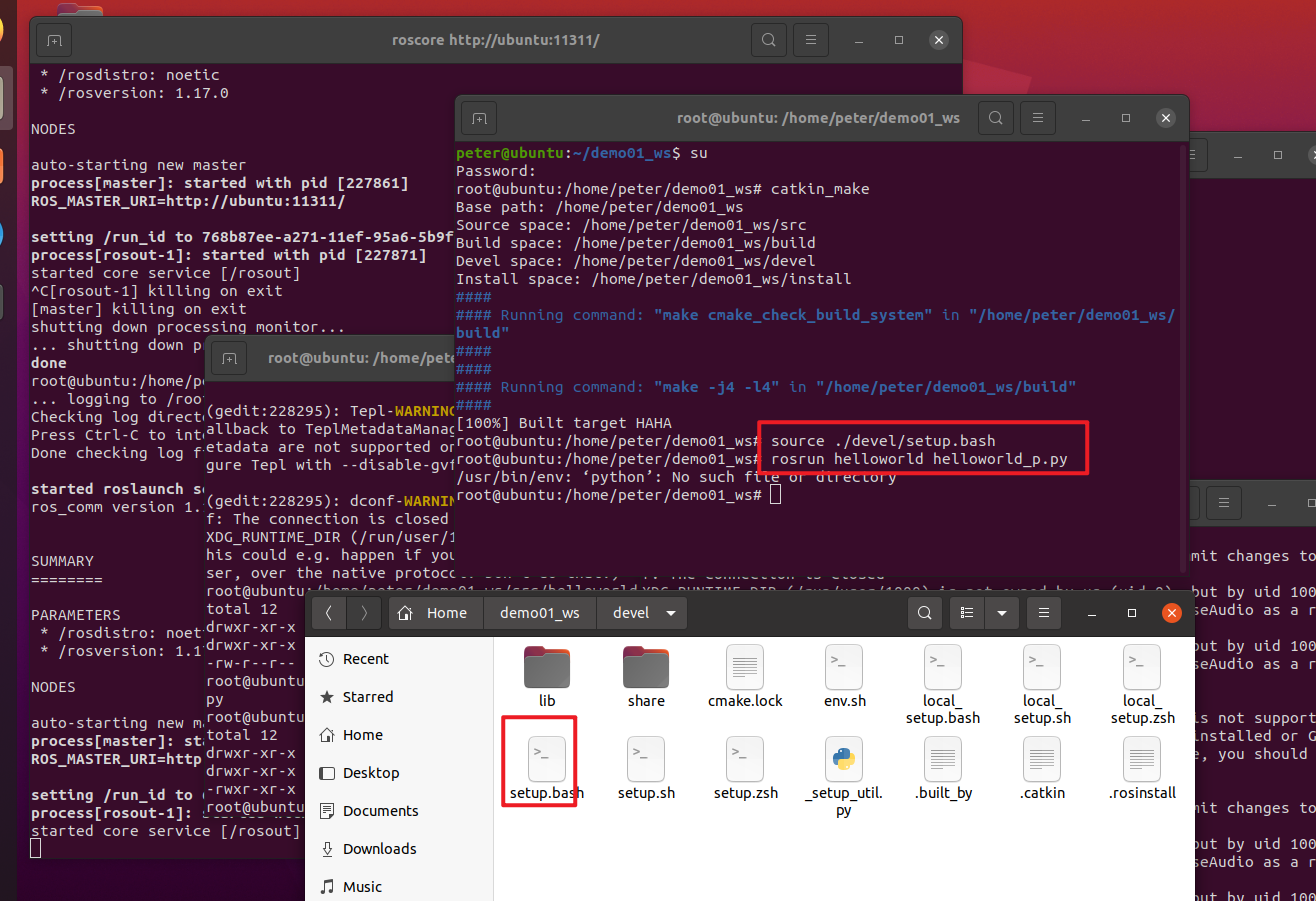
/usr/bin/env: ‘python’: No such file or directory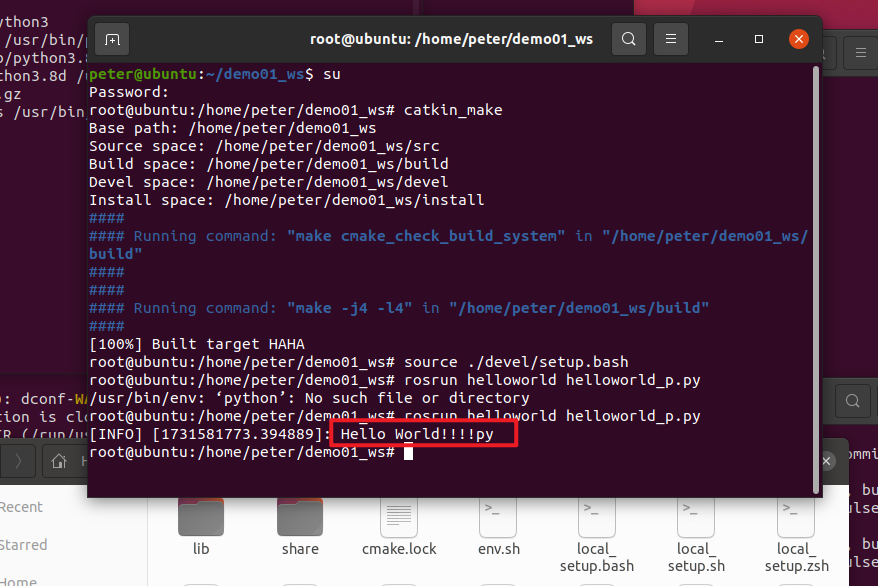
sudo ln -s /usr/bin/python3 /usr/bin/python报错:只能开一个roscore
RLException: roscore cannot run as another roscore/master is already running.
Please kill other roscore/master processes before relaunching.
The ROS_MASTER_URI is http://127.0.0.1:11311/
The traceback for the exception was written to the log file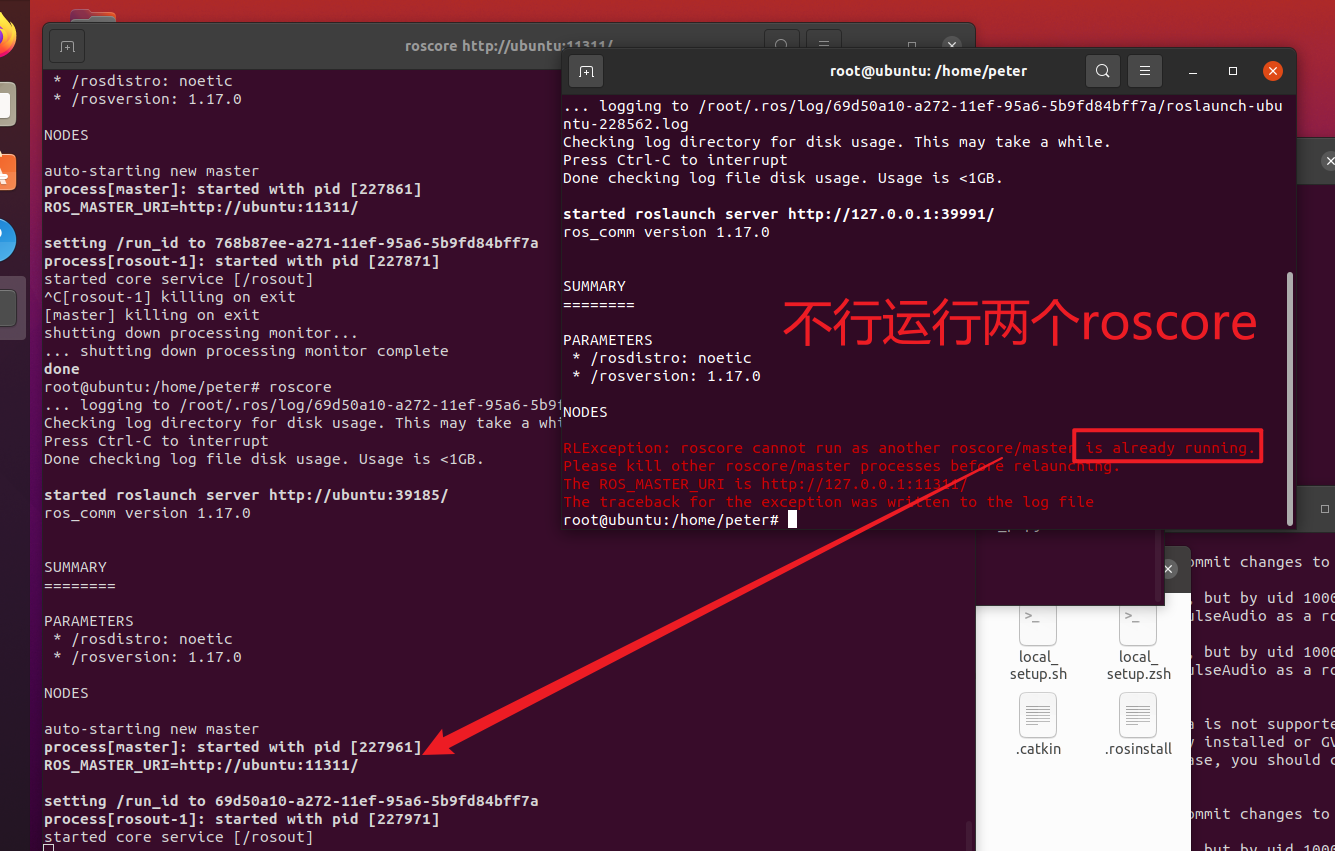
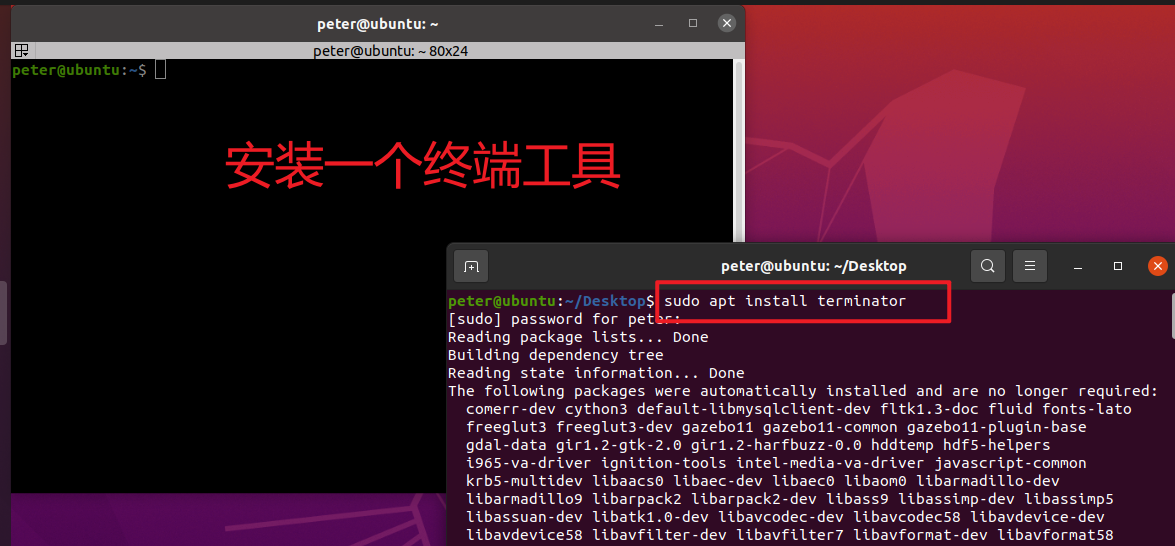
集成开发环境搭建
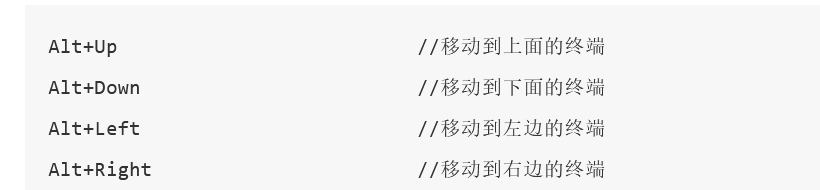
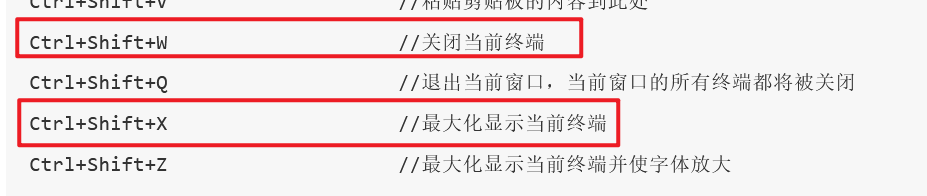
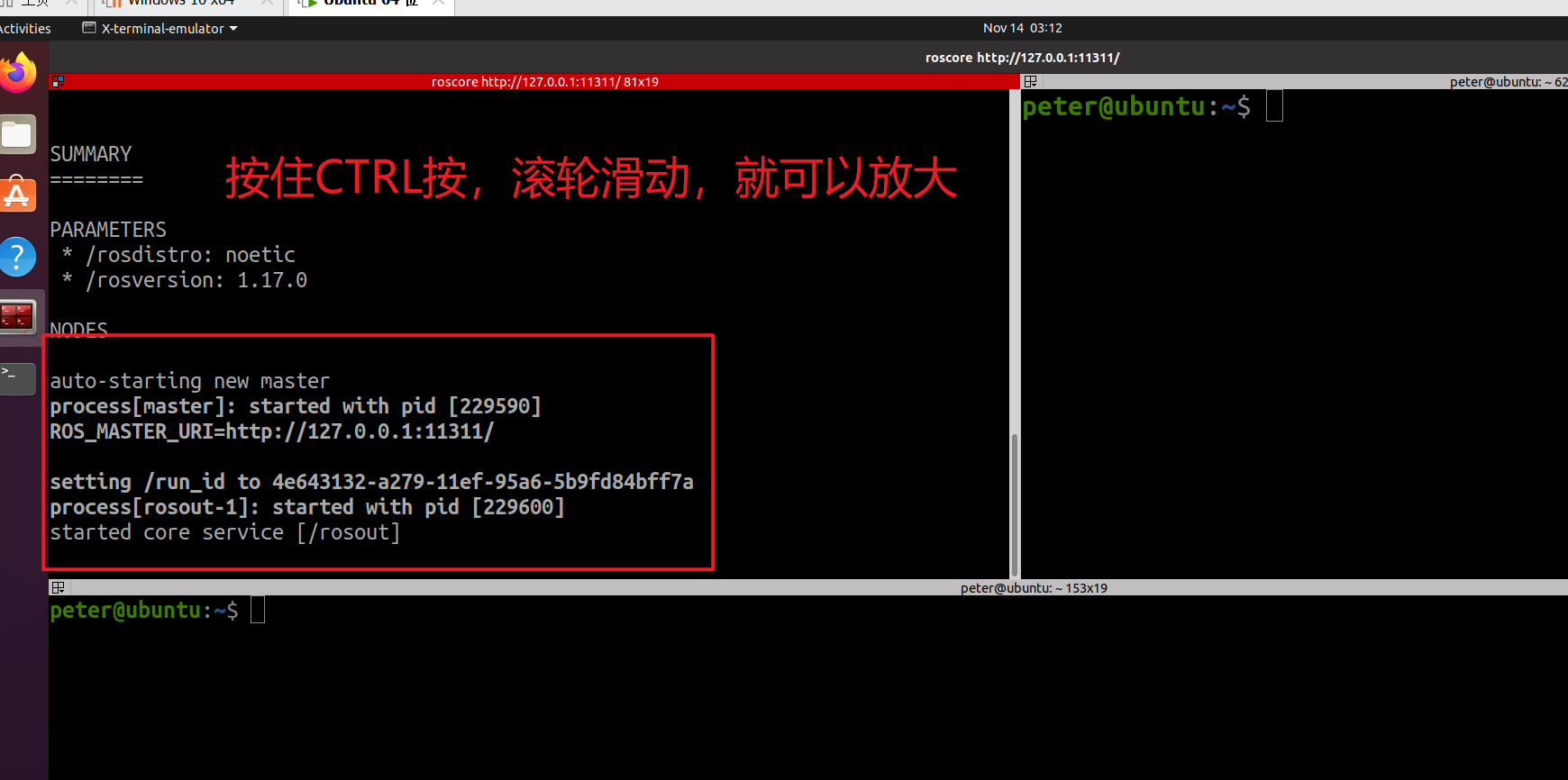
终端工具
vscode安装

sudo apt update
sudo apt install software-properties-common apt-transport-https wgetwget -q https://packages.microsoft.com/keys/microsoft.asc -O- | sudo apt-key add -
sudo add-apt-repository "deb [arch=amd64] https://packages.microsoft.com/repos/vscode stable main"
sudo apt install code安装插件

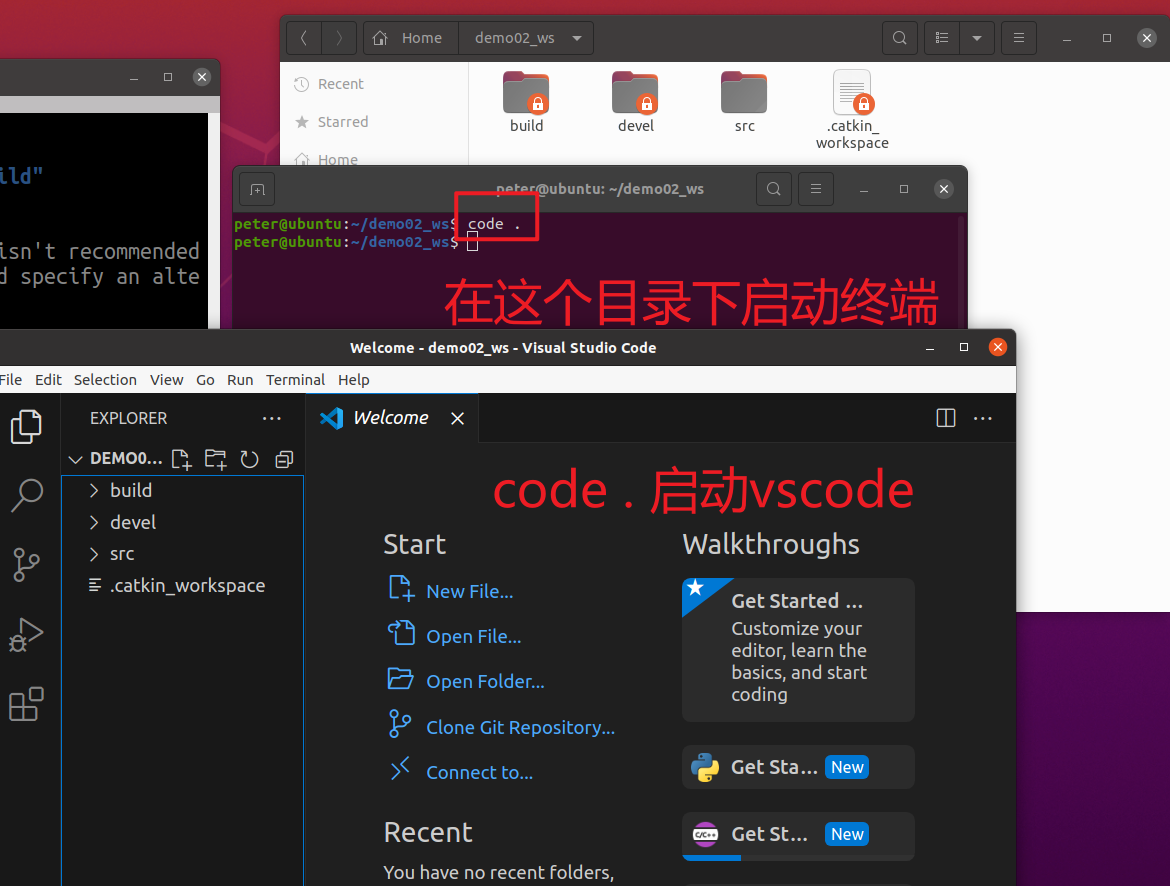
报错解决:root启动code . 失败
root@ubuntu:/home/peter/demo02_ws# code .
You are trying to start Visual Studio Code as a super user which isn't recommended. If this was intended, please add the argument `--no-sandbox` and specify an alternate user data directory using the `--user-data-dir` argument.
vi ~/.bashrc
# 添加一行
alias code='/usr/share/code/code . --no-sandbox --unity-launch'
# 报存生效
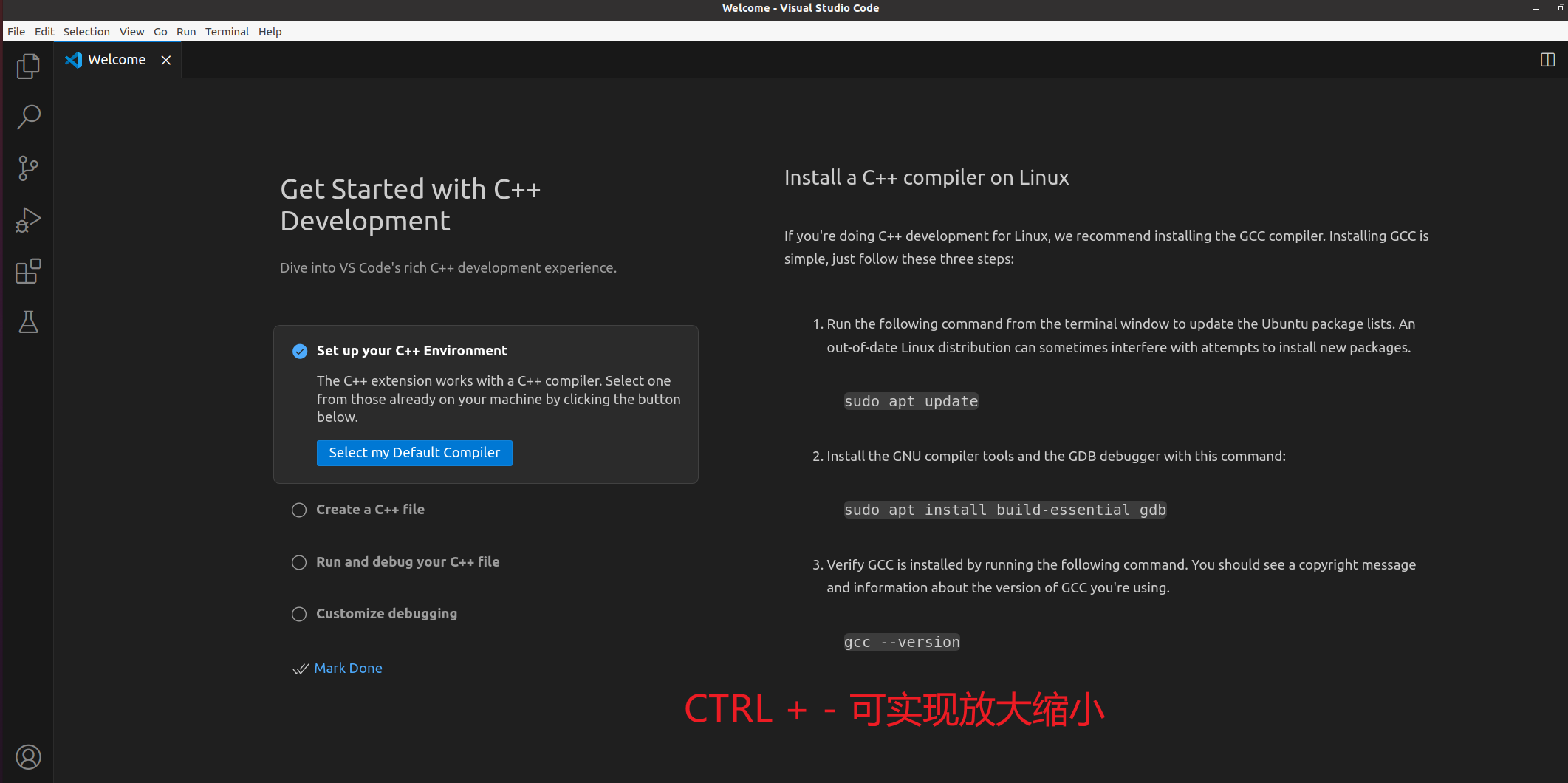
source ~/.bashrc关于字体太小
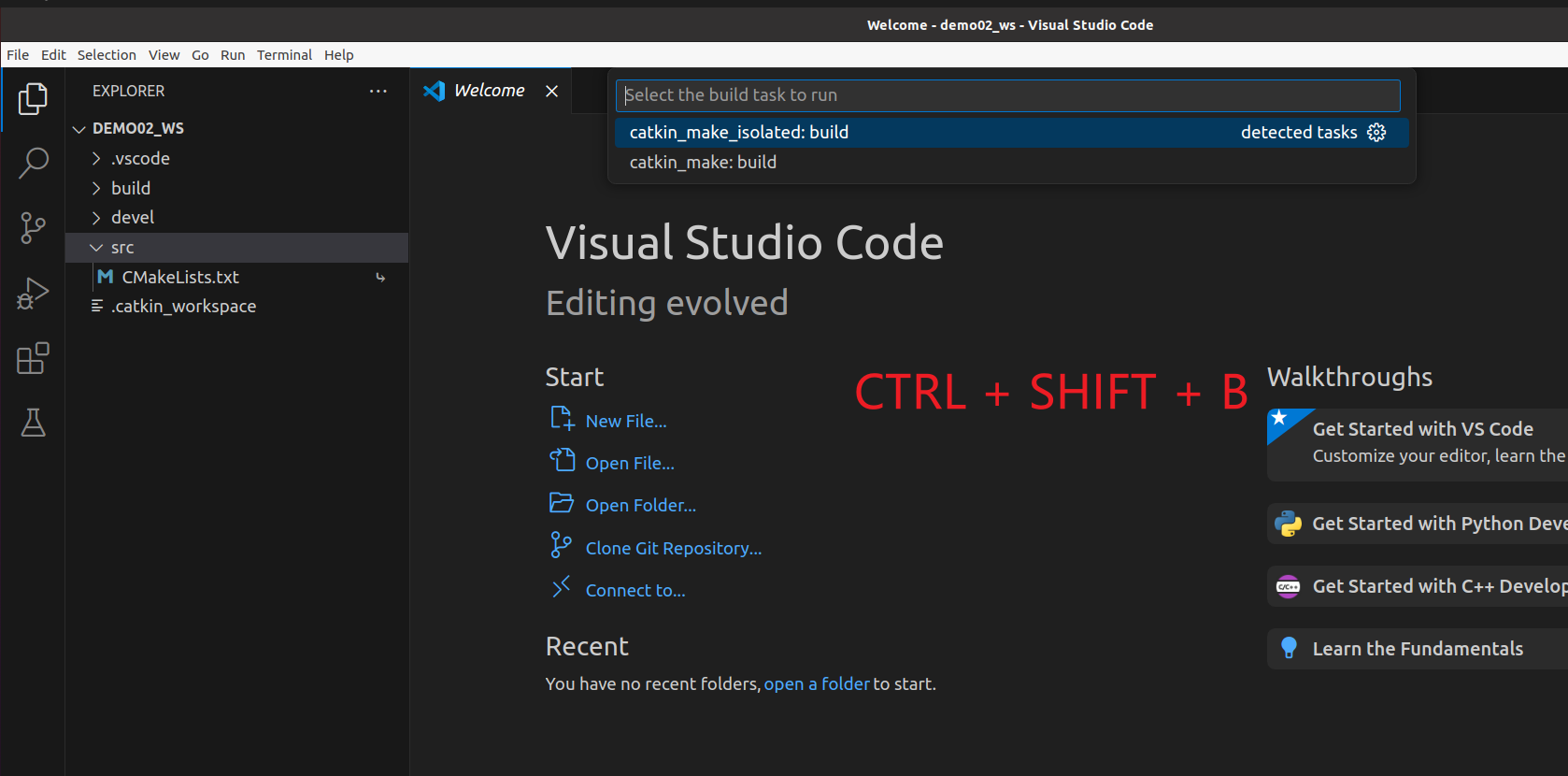
在vscode中开发C++
项目配置
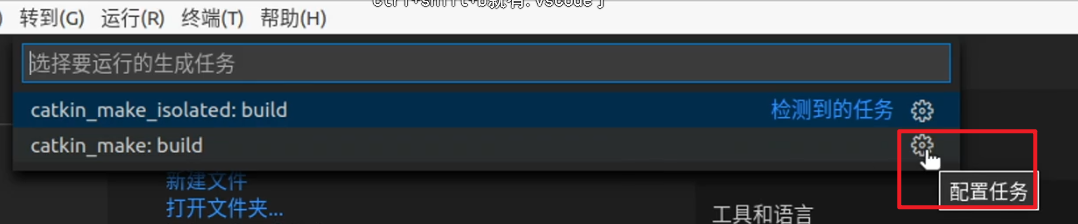
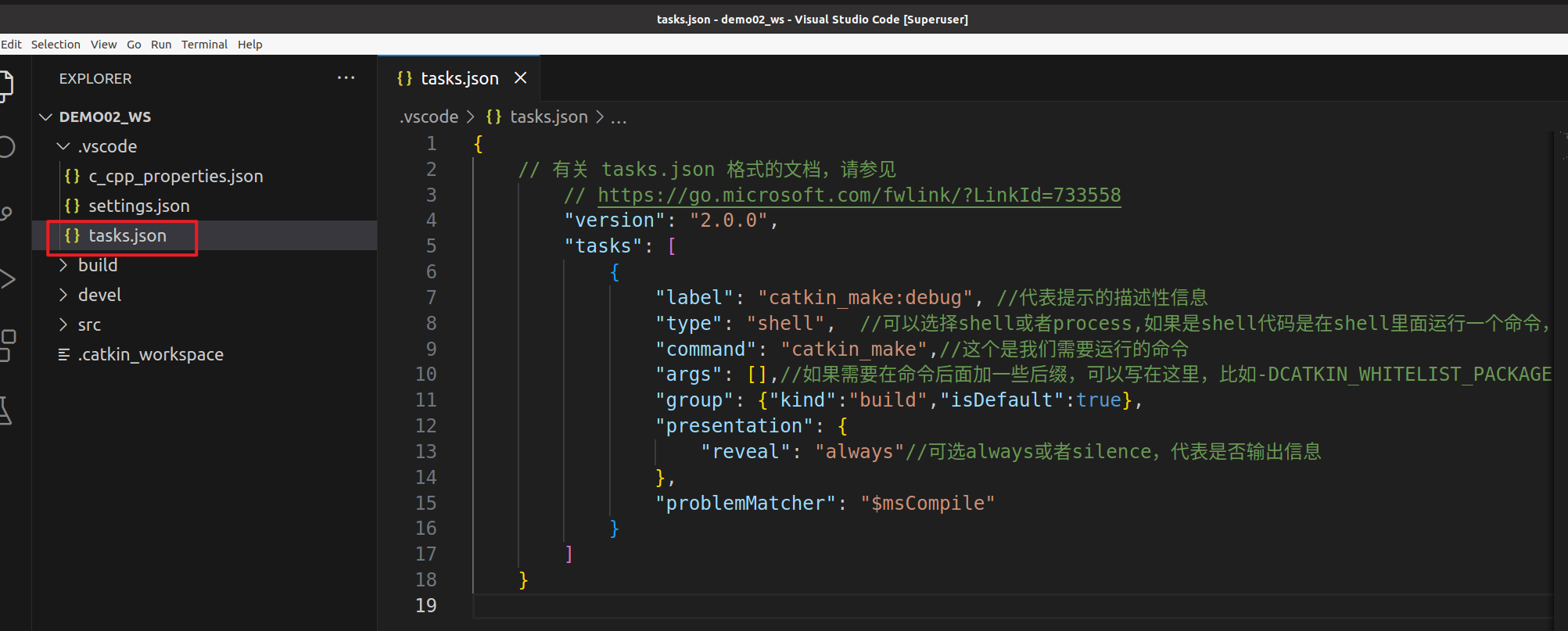
{
// 有关 tasks.json 格式的文档,请参见
// https://go.microsoft.com/fwlink/?LinkId=733558
"version": "2.0.0",
"tasks": [
{
"label": "catkin_make:debug", //代表提示的描述性信息
"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行
"command": "catkin_make",//这个是我们需要运行的命令
"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
"group": {"kind":"build","isDefault":true},
"presentation": {
"reveal": "always"//可选always或者silence,代表是否输出信息
},
"problemMatcher": "$msCompile"
}
]
}
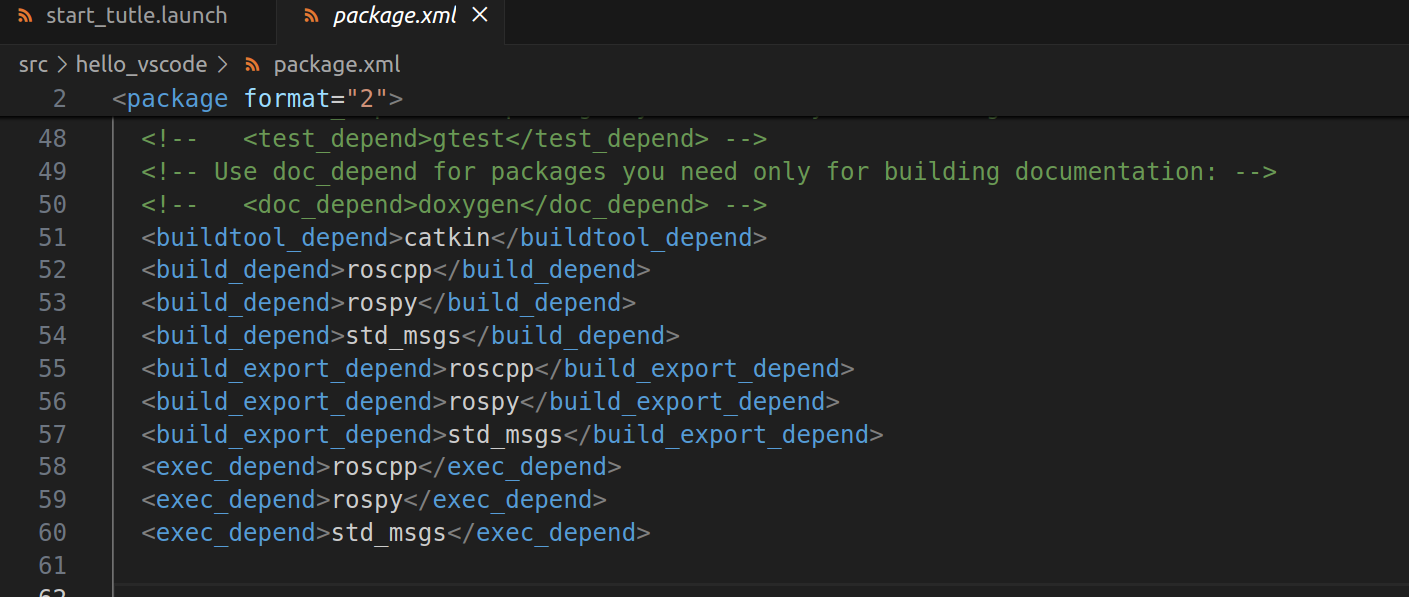
新建包+添加依赖
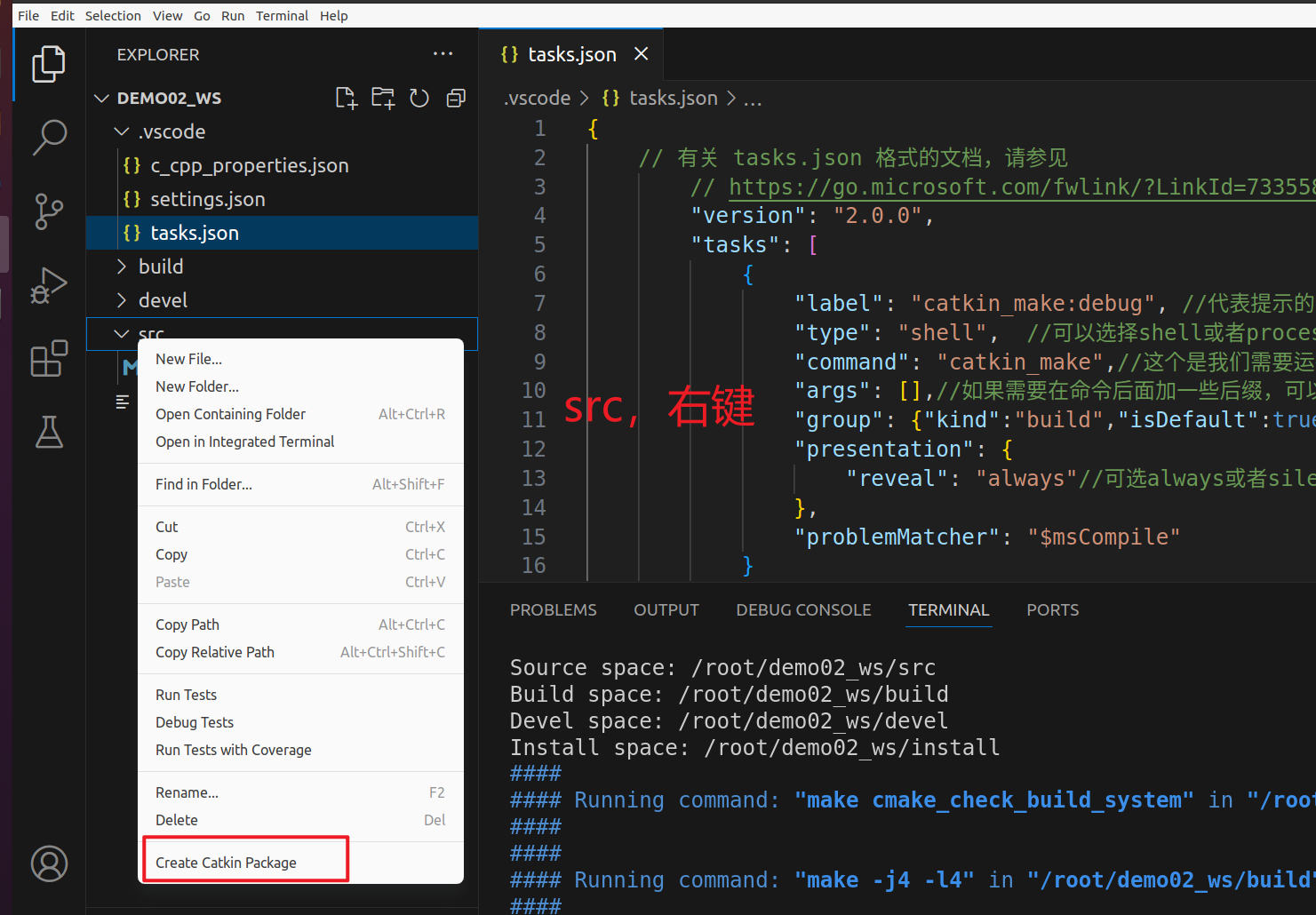
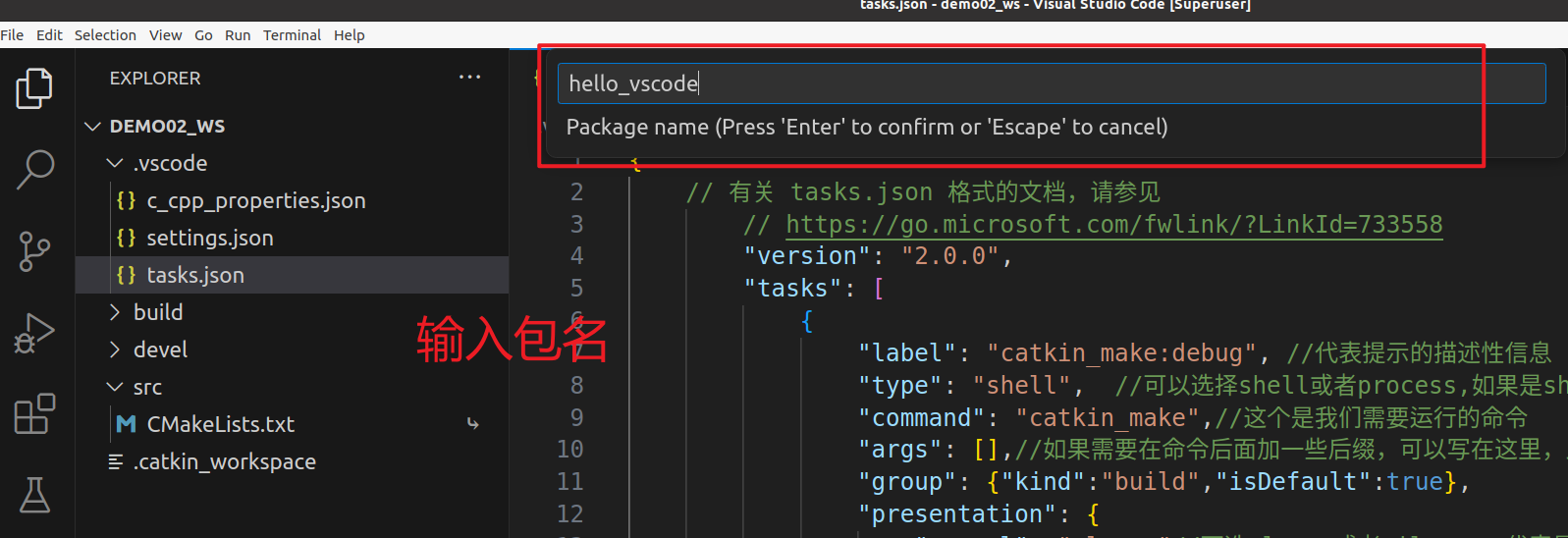
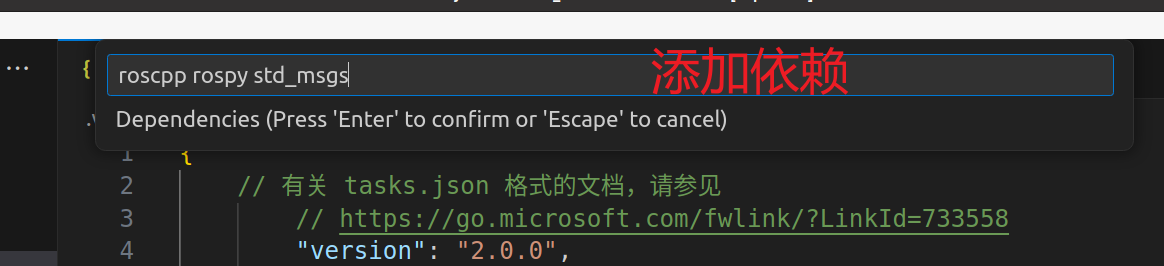
roscpp rospy std_msgs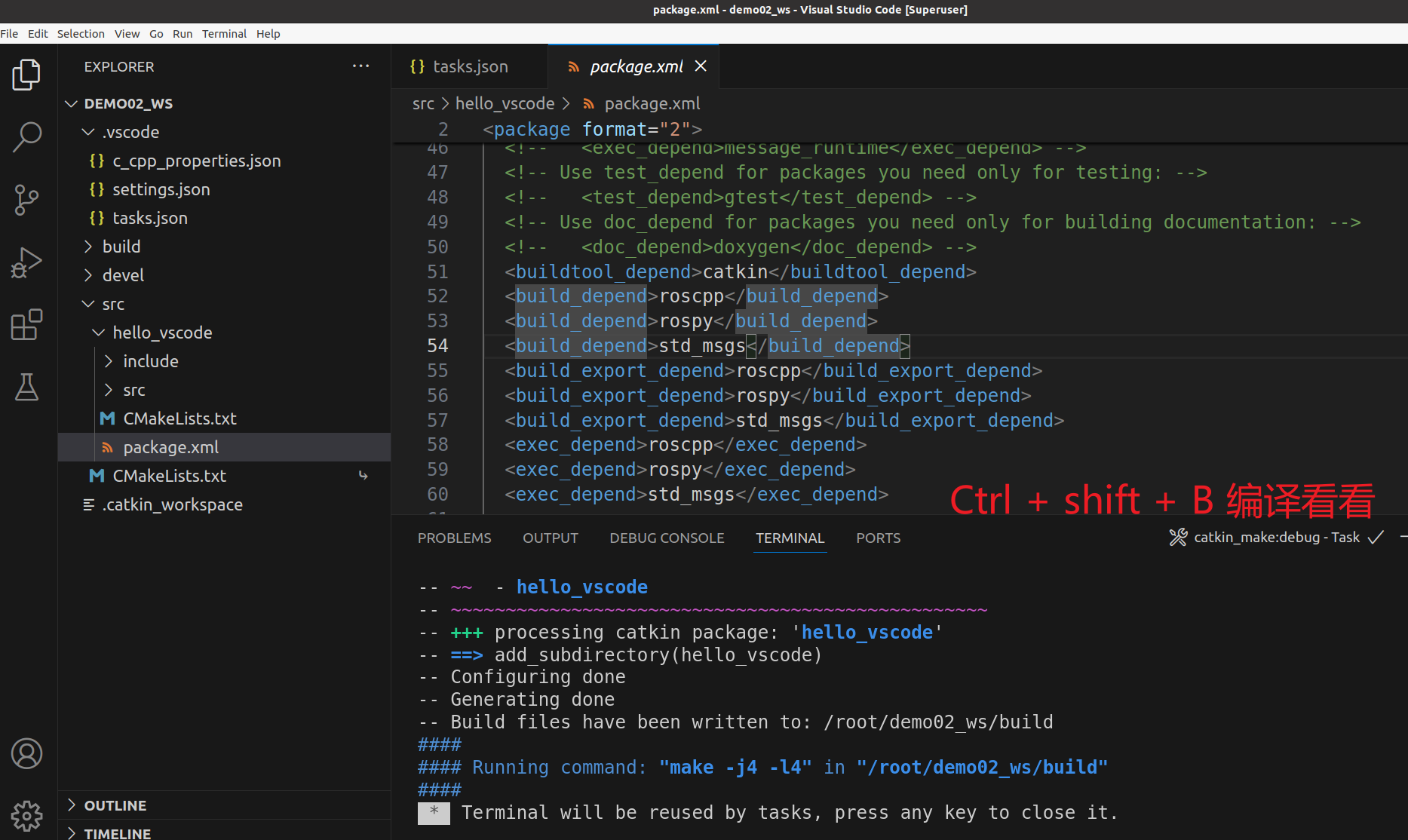
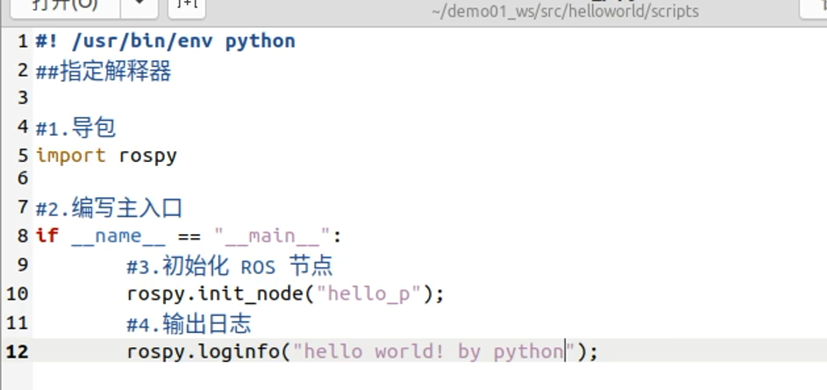
新建文件写代码
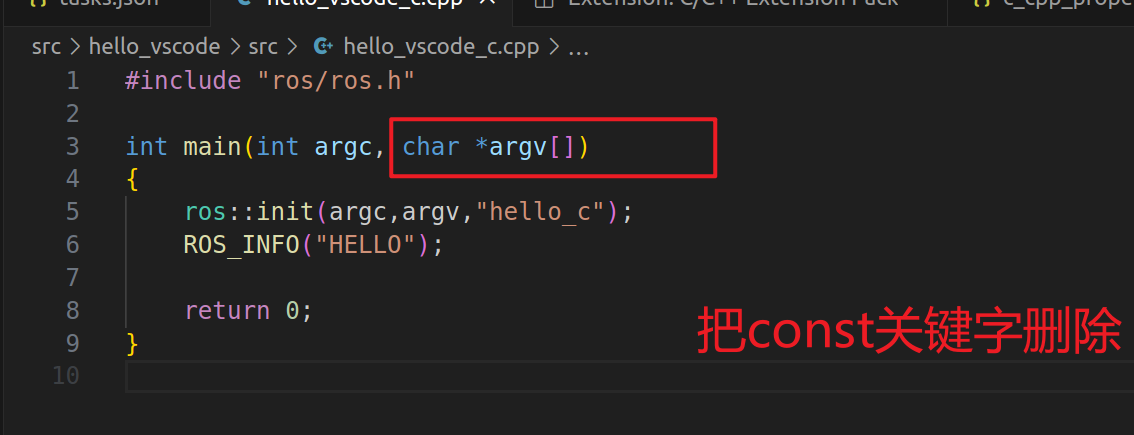
#include "ros/ros.h"
int main(int argc, char *argv[])
{
ros::init(argc,argv,"hello_c");
ROS_INFO("HELLO");
return 0;
}
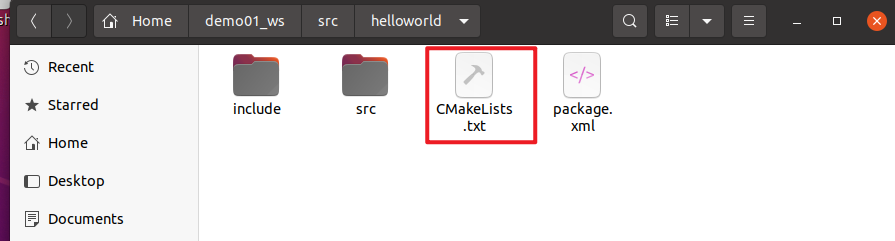
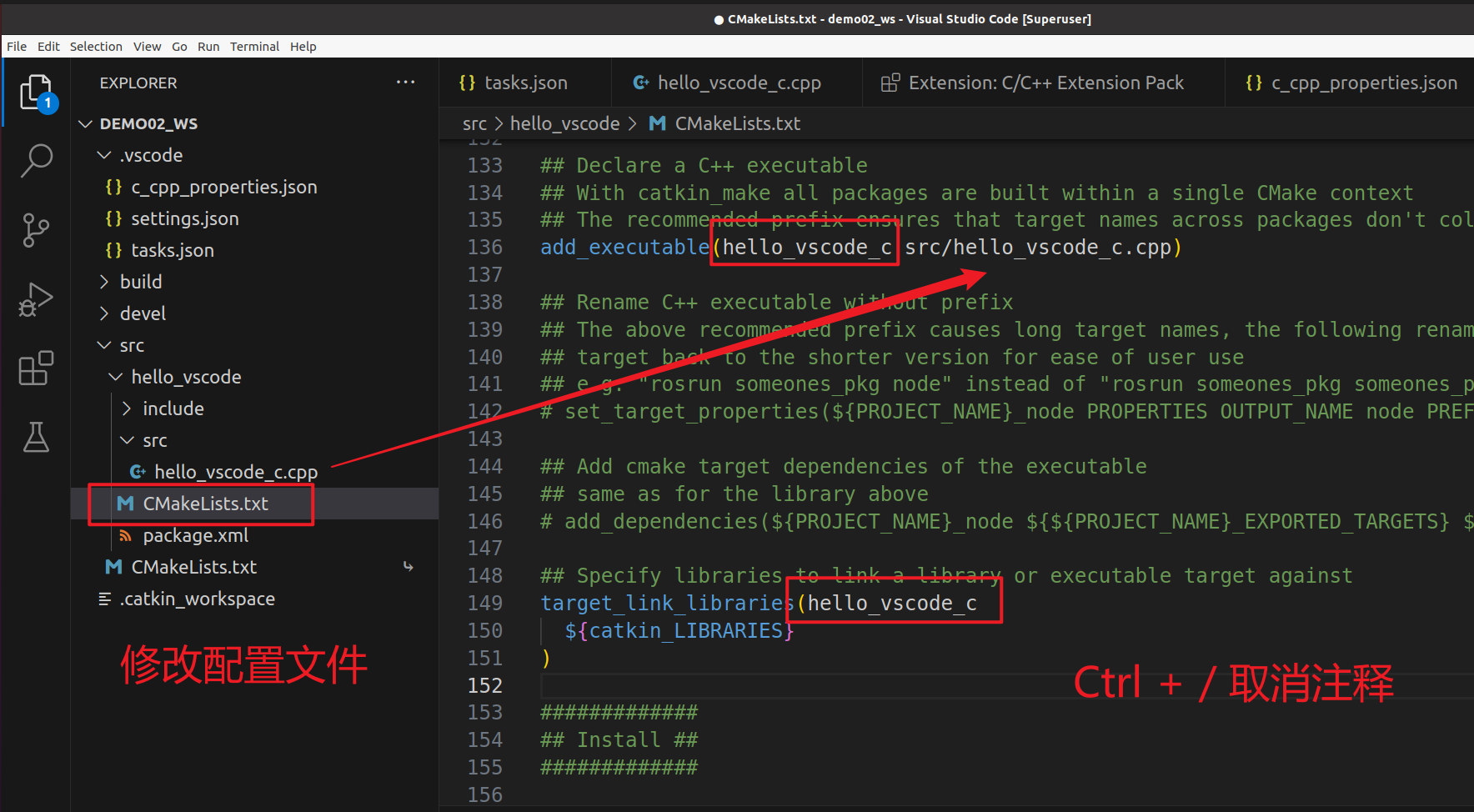
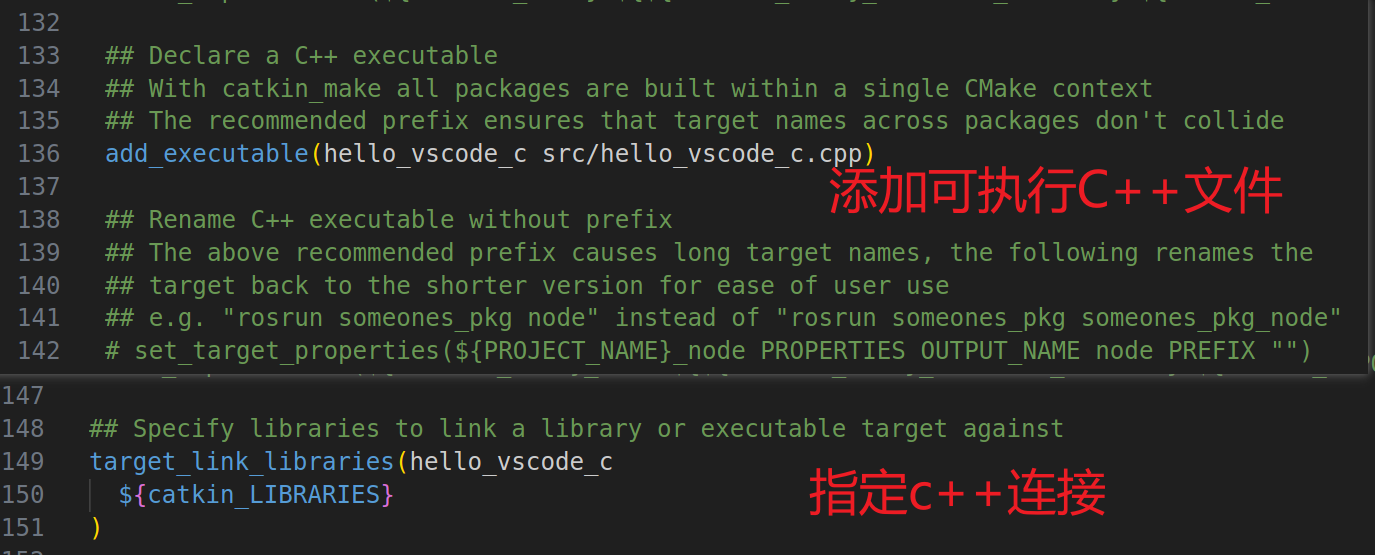
修改CMakeList文件
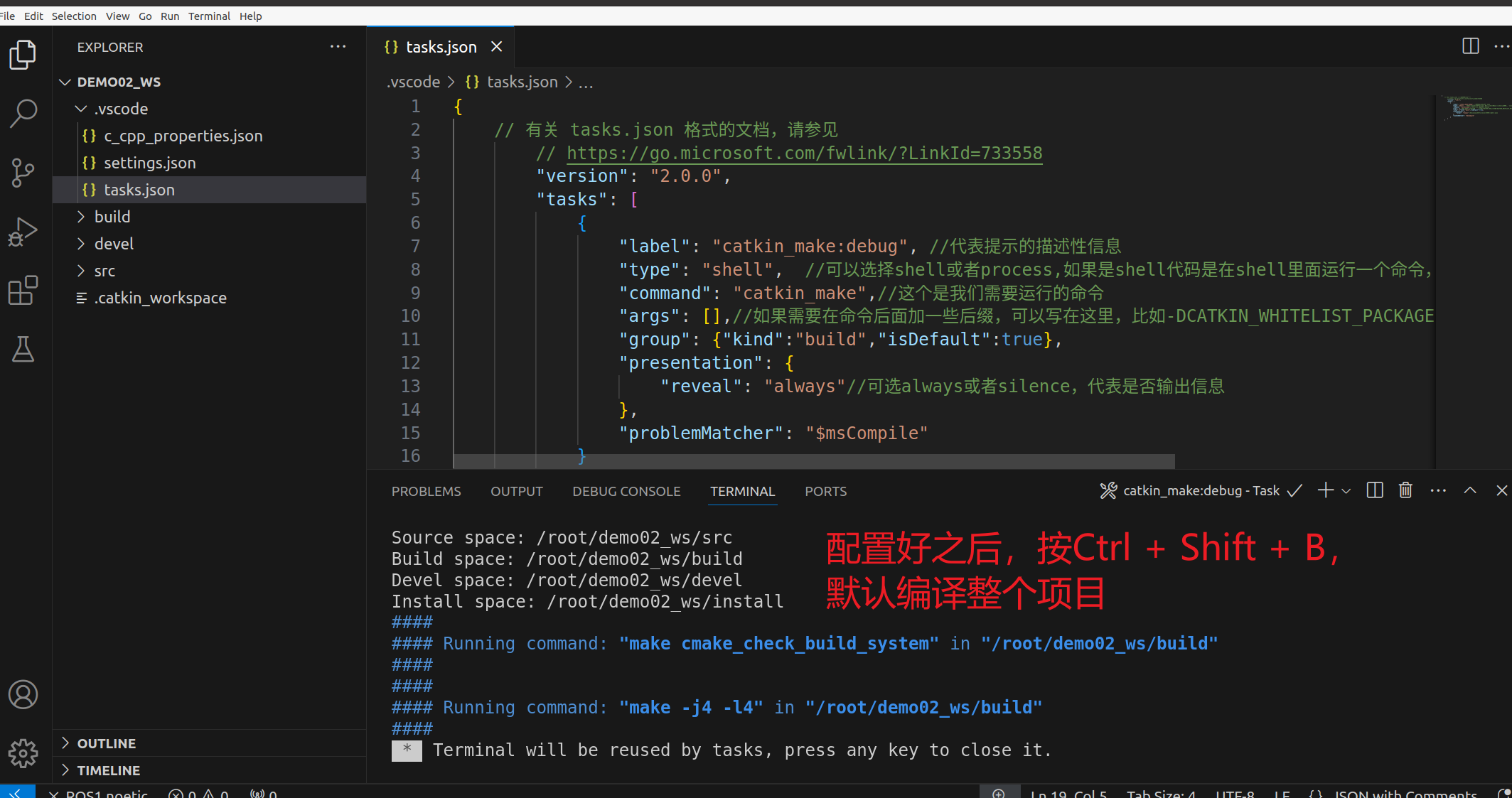
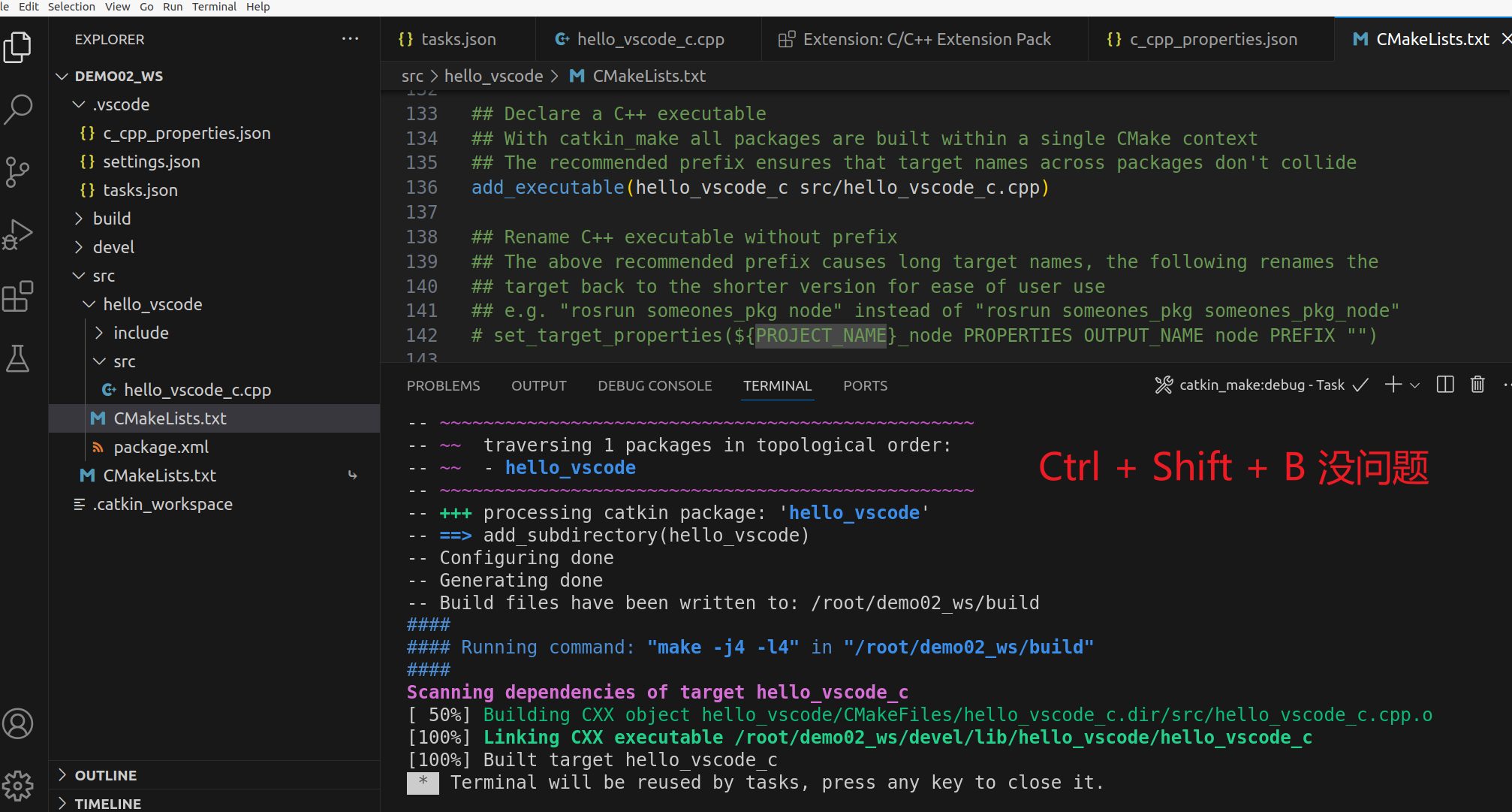
进行编译
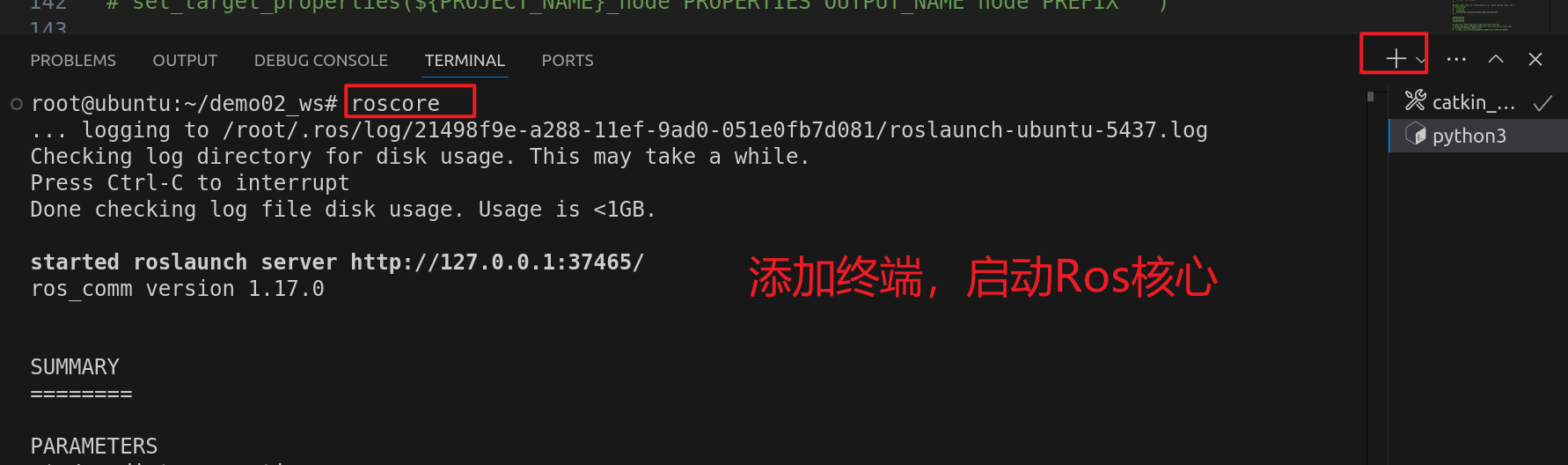
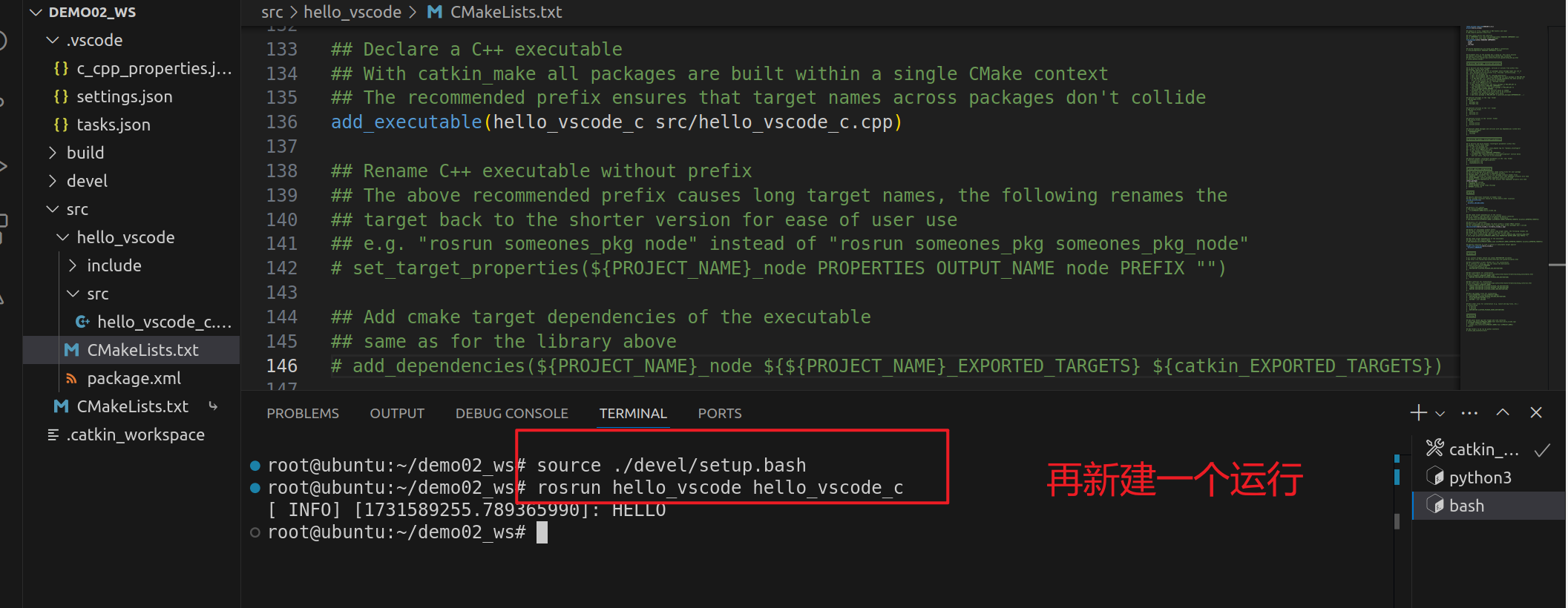
终端运行
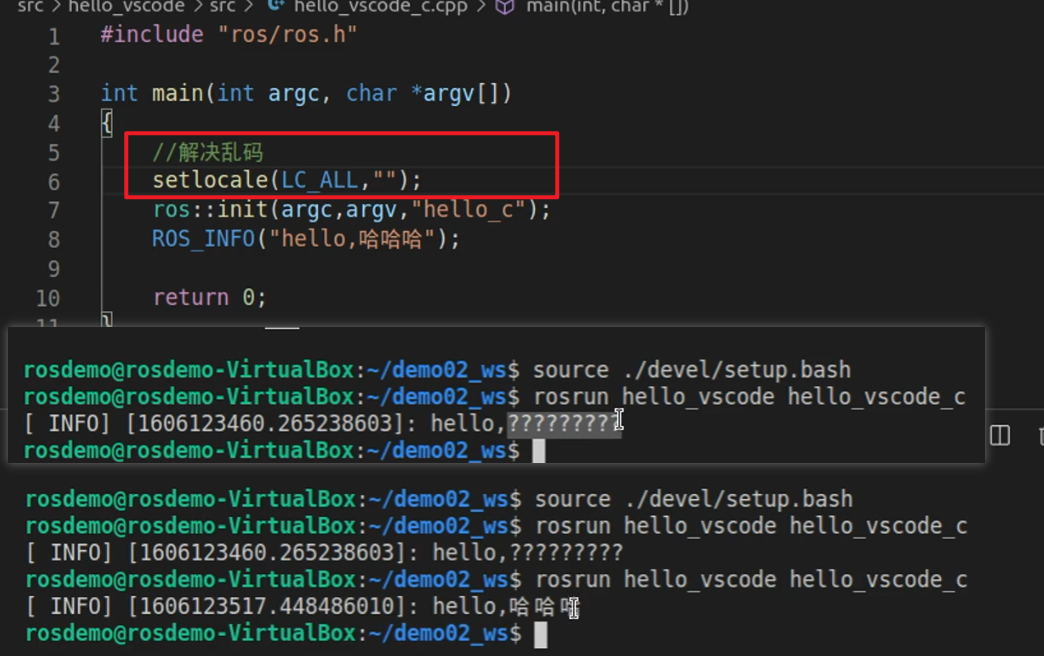
解决乱码
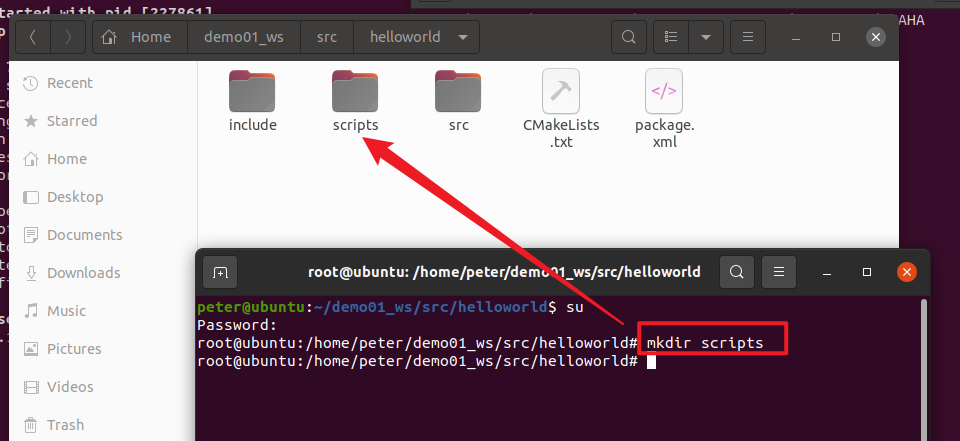
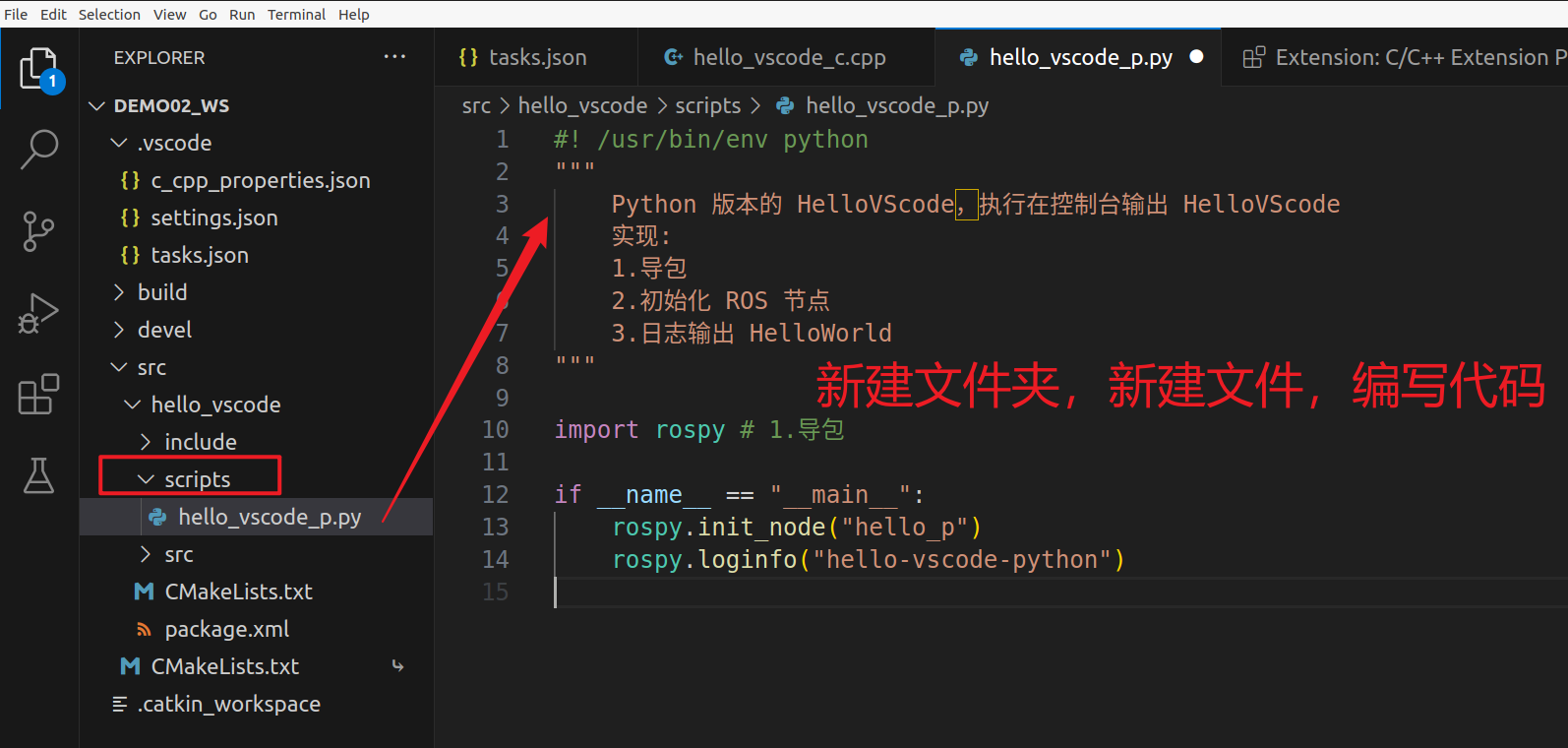
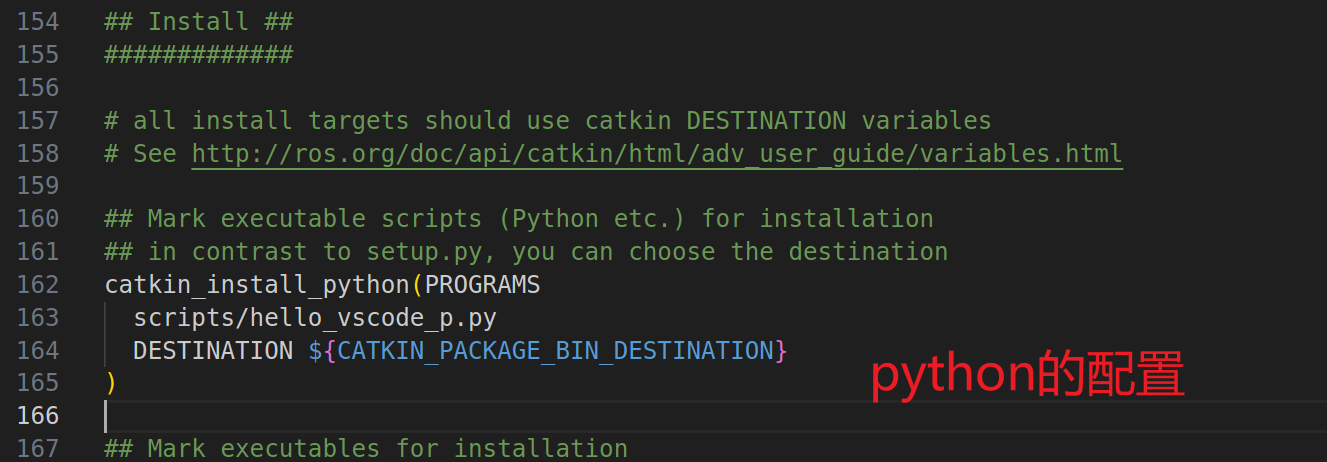
使用Python开发
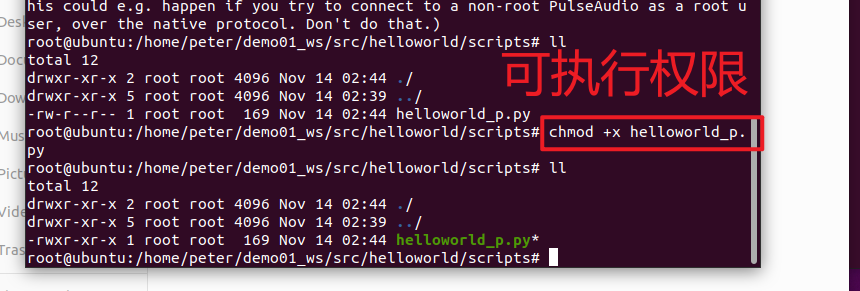
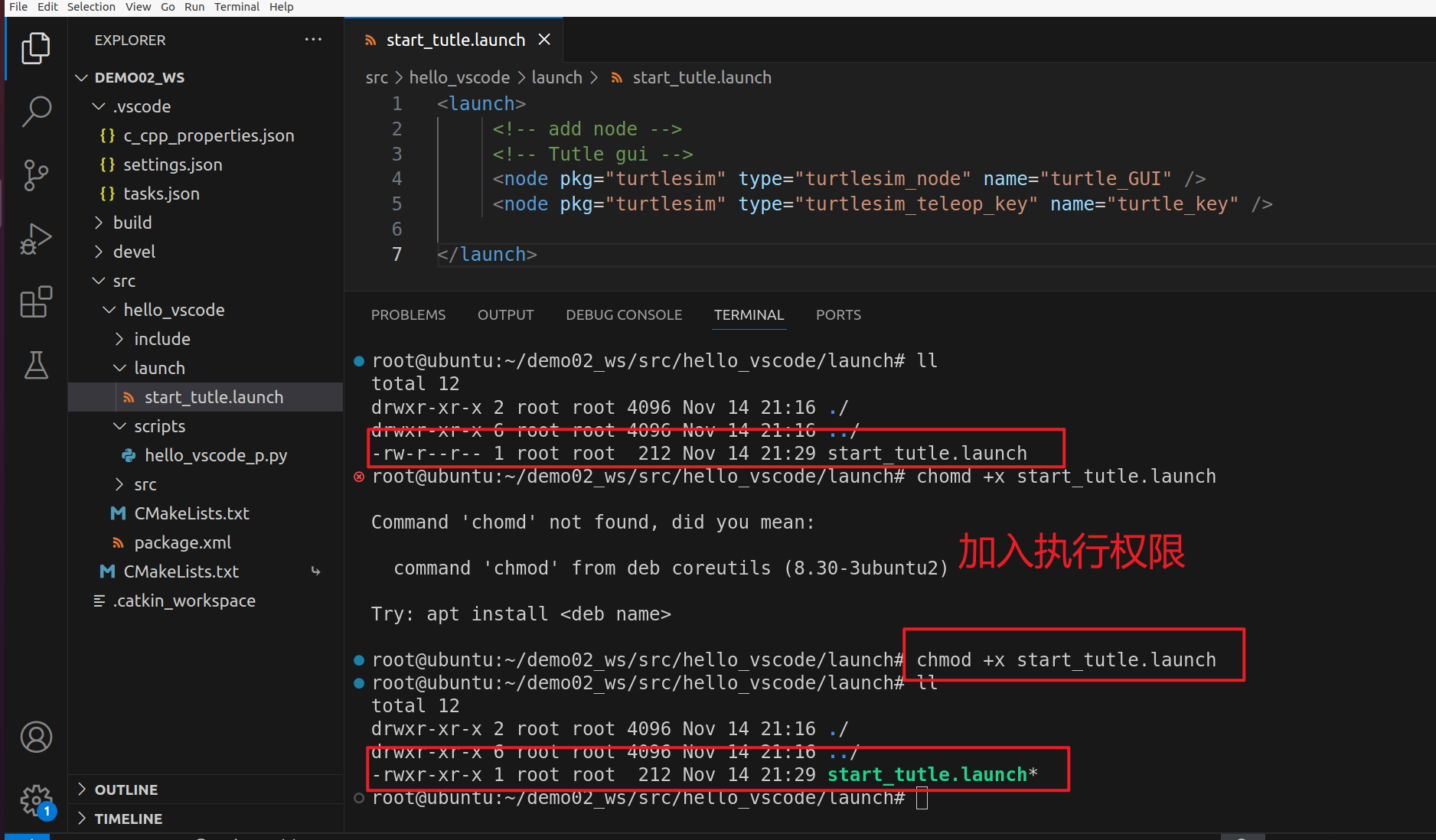
添加权限
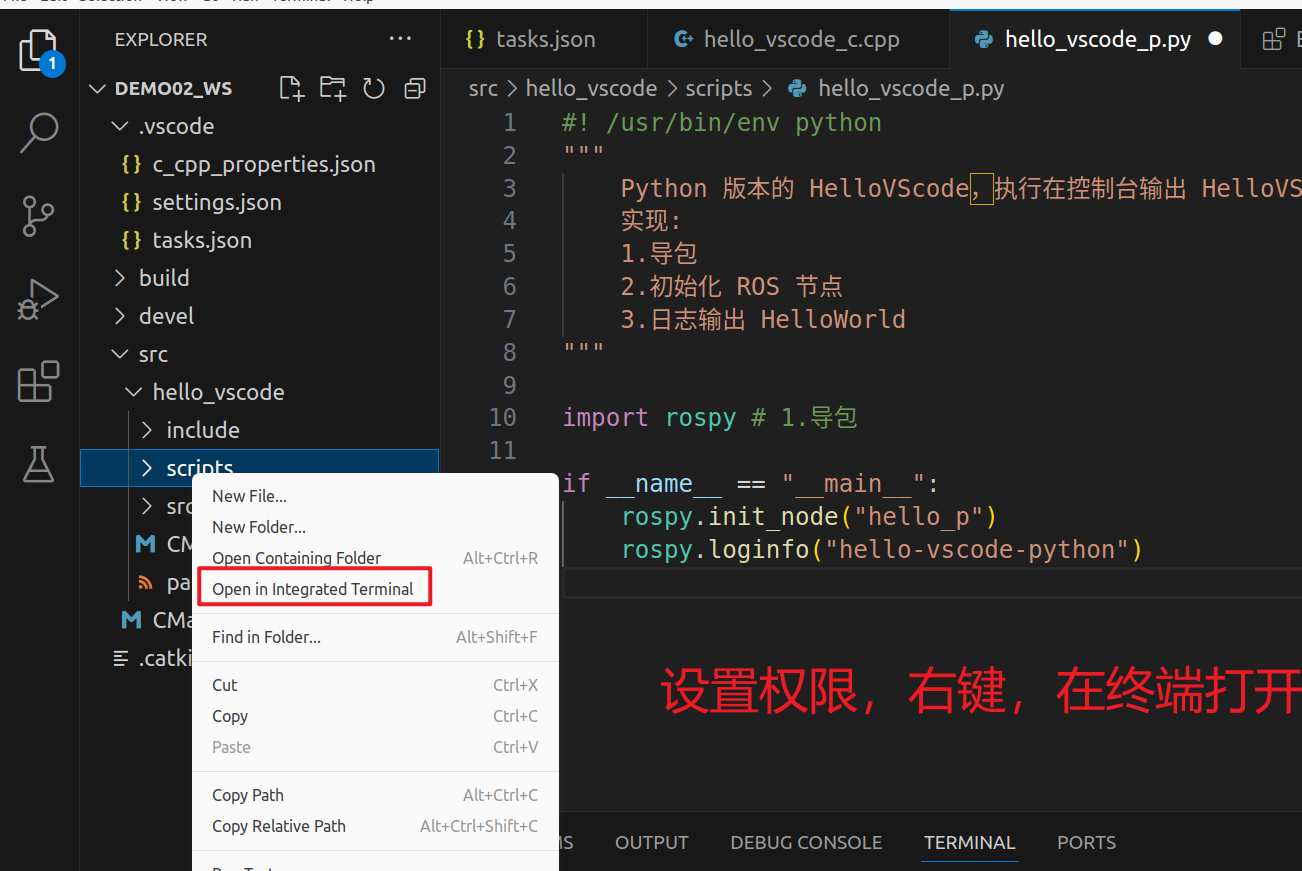
chmod +x *.py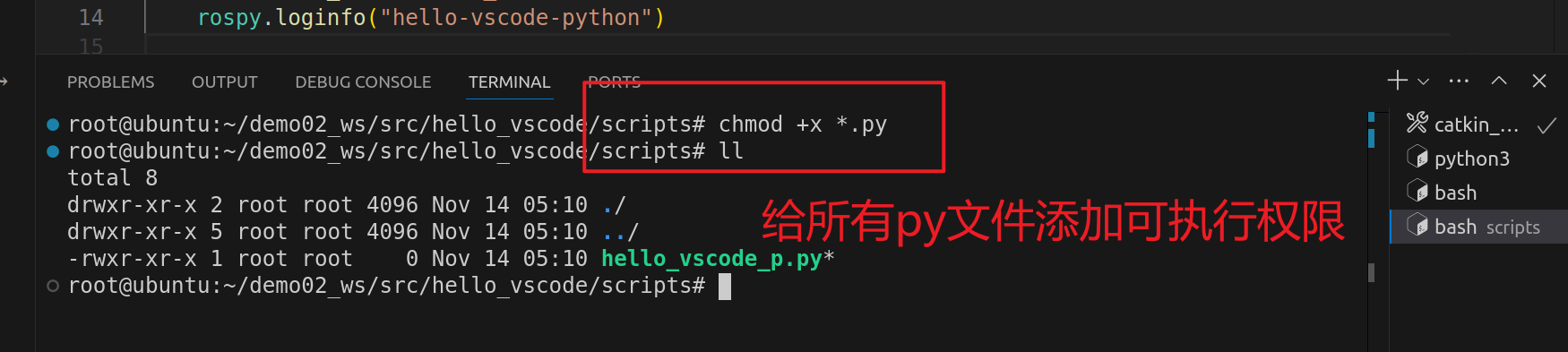
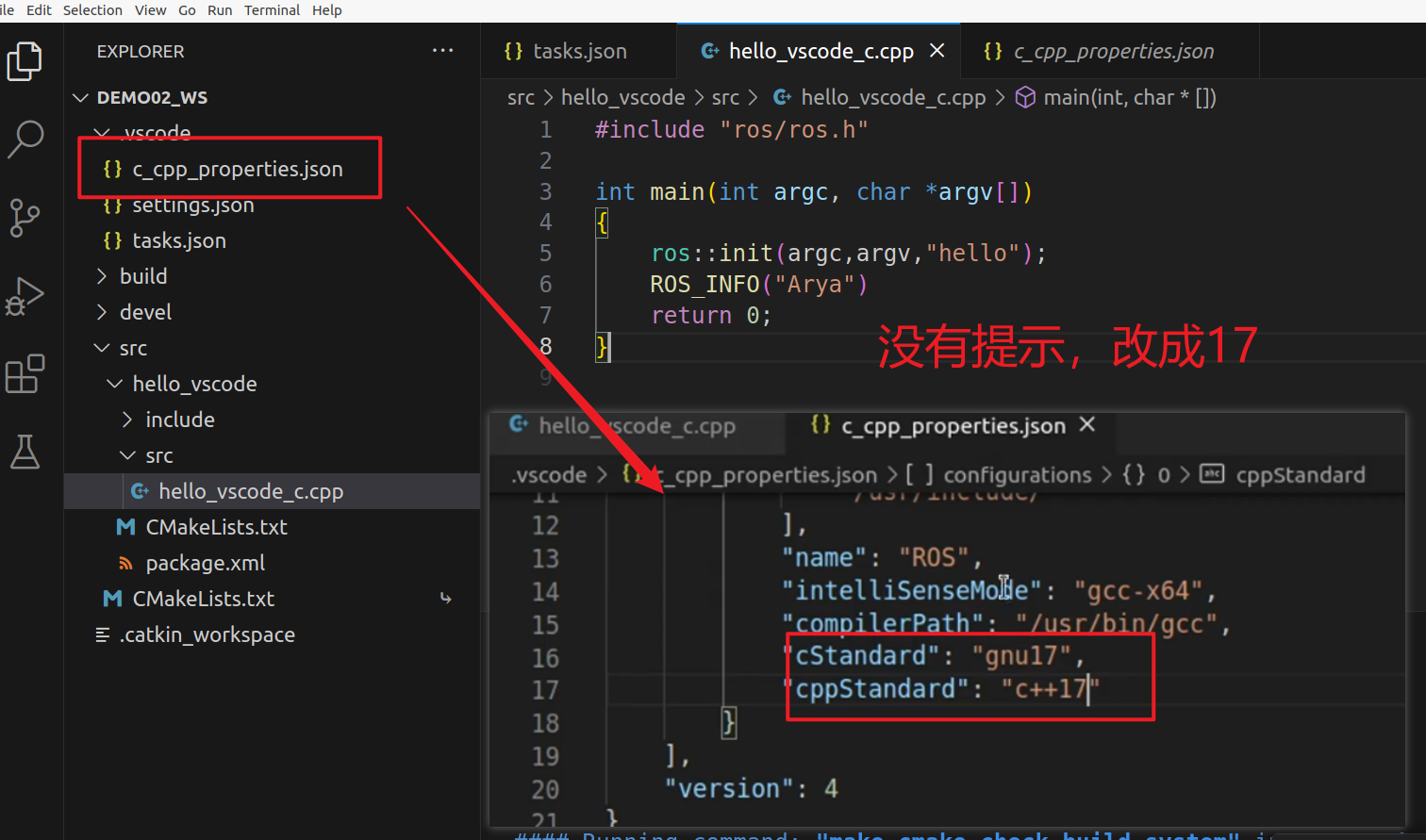
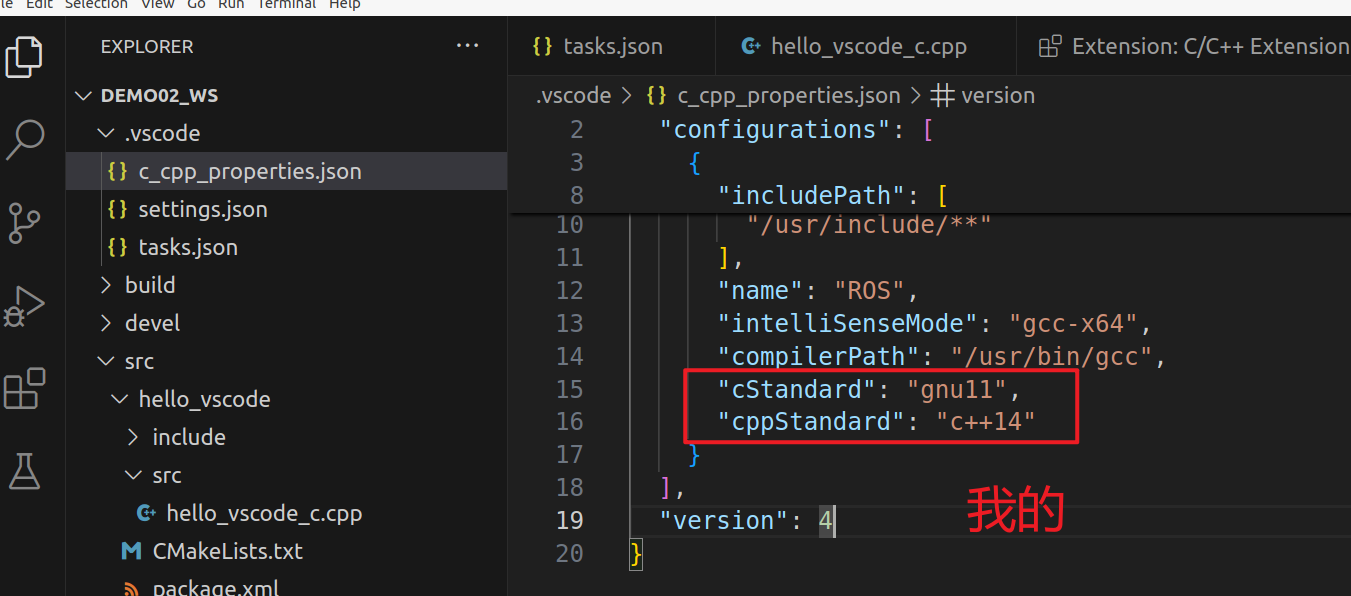
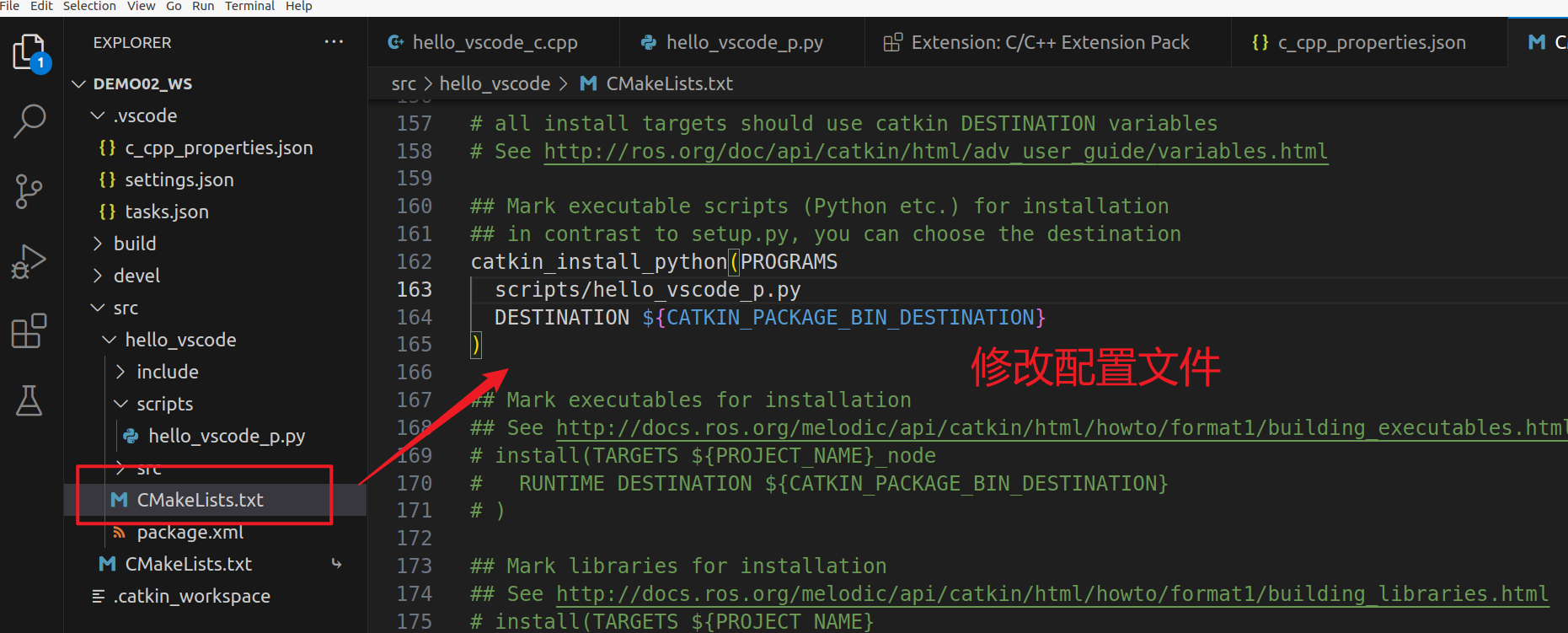
修改配置
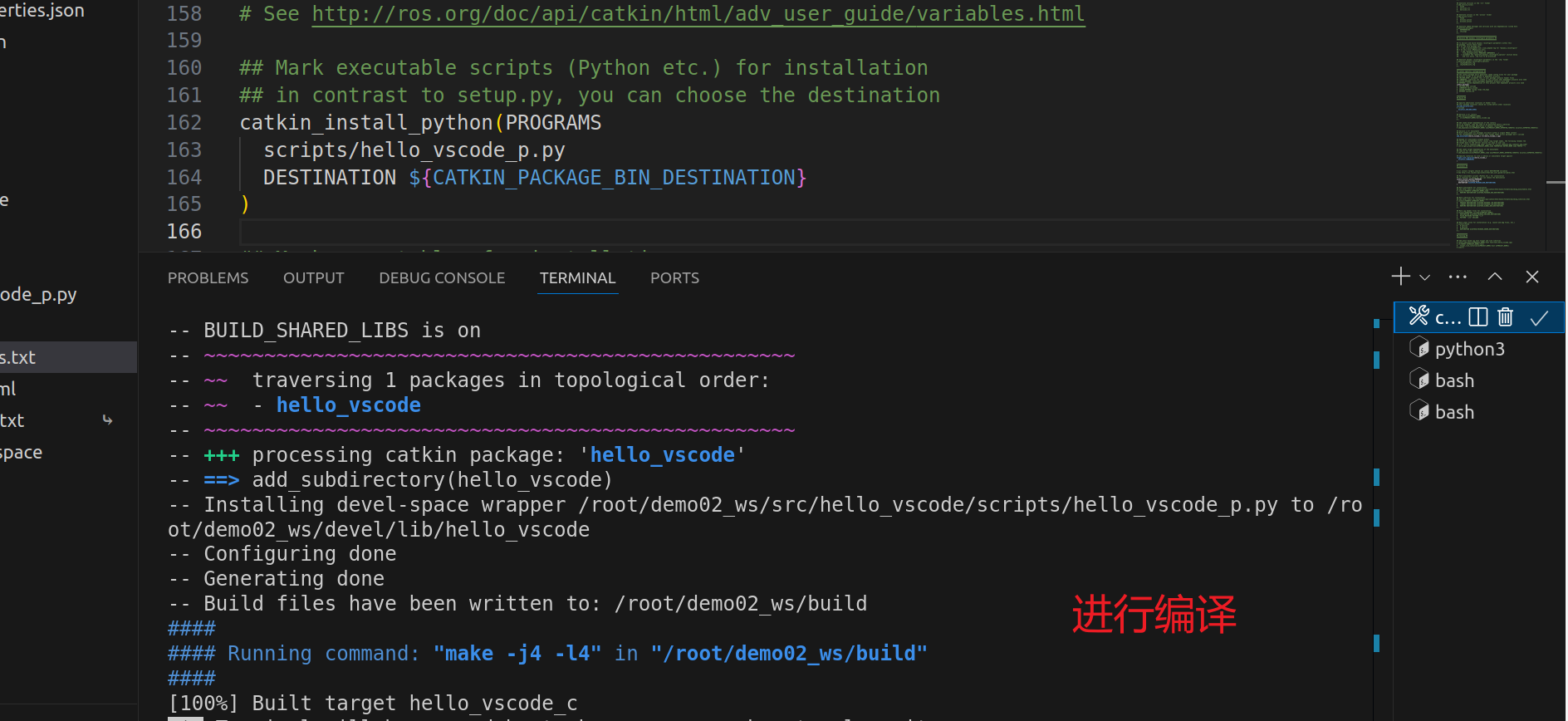
编译执行

其他问题

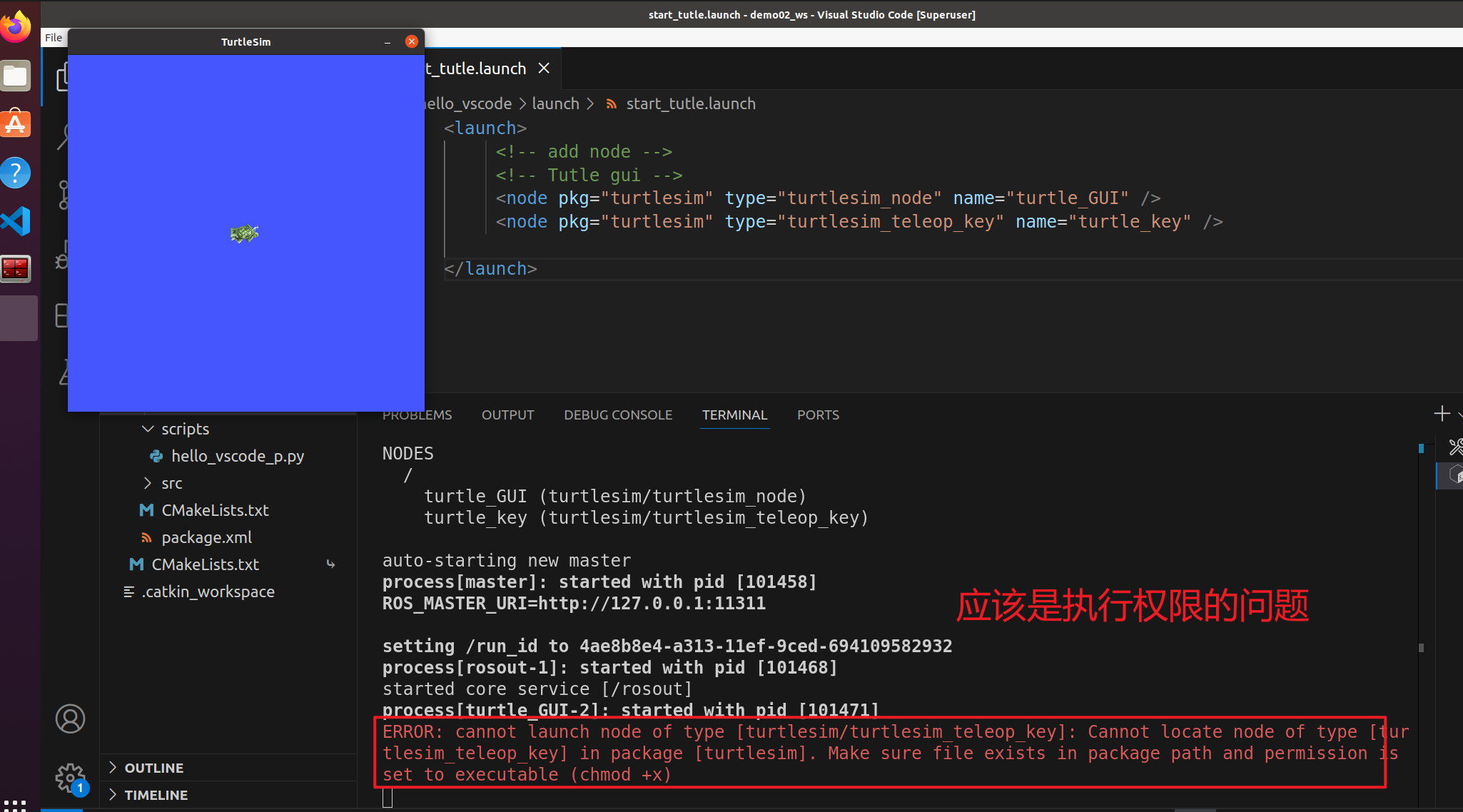
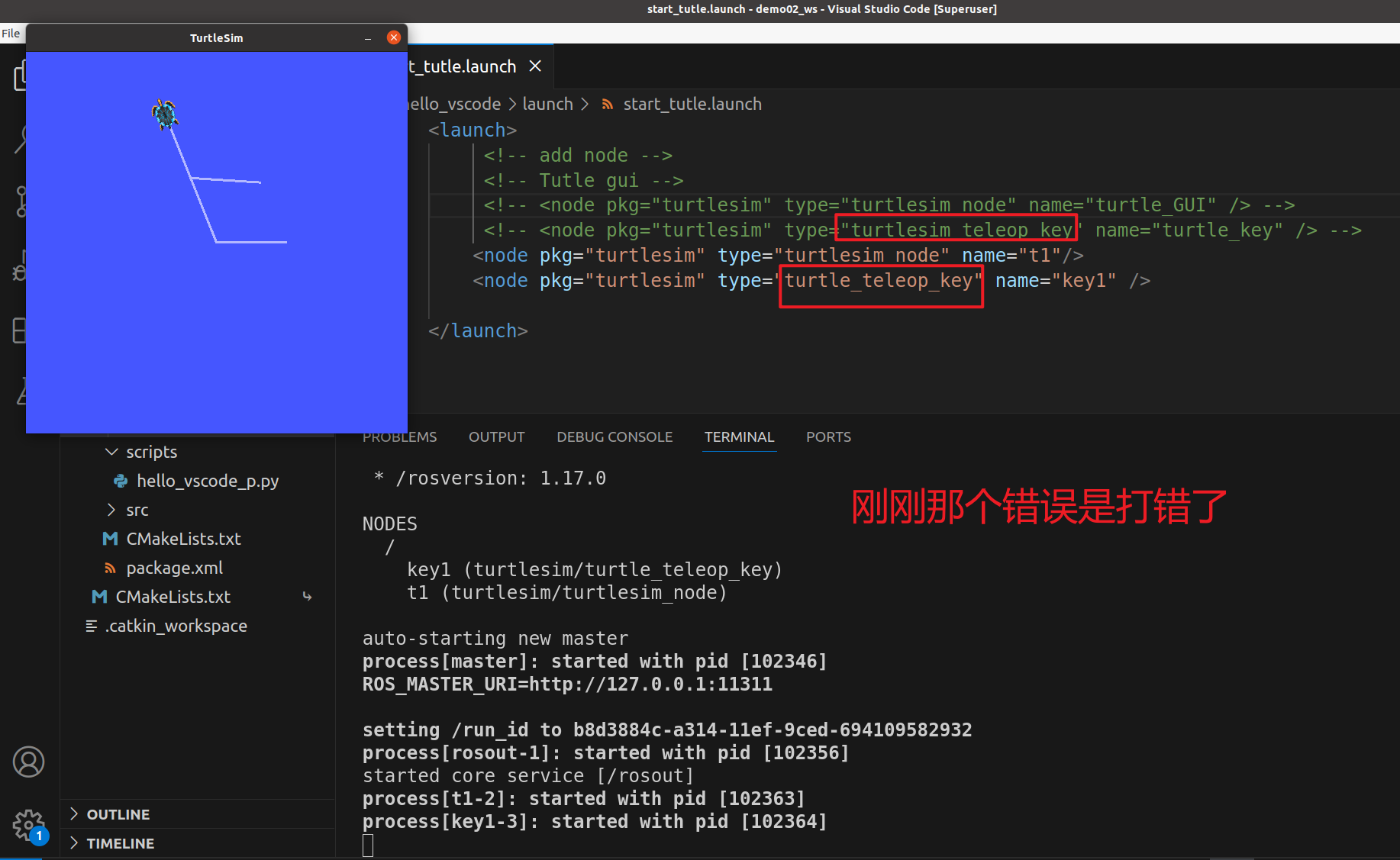
launch文件
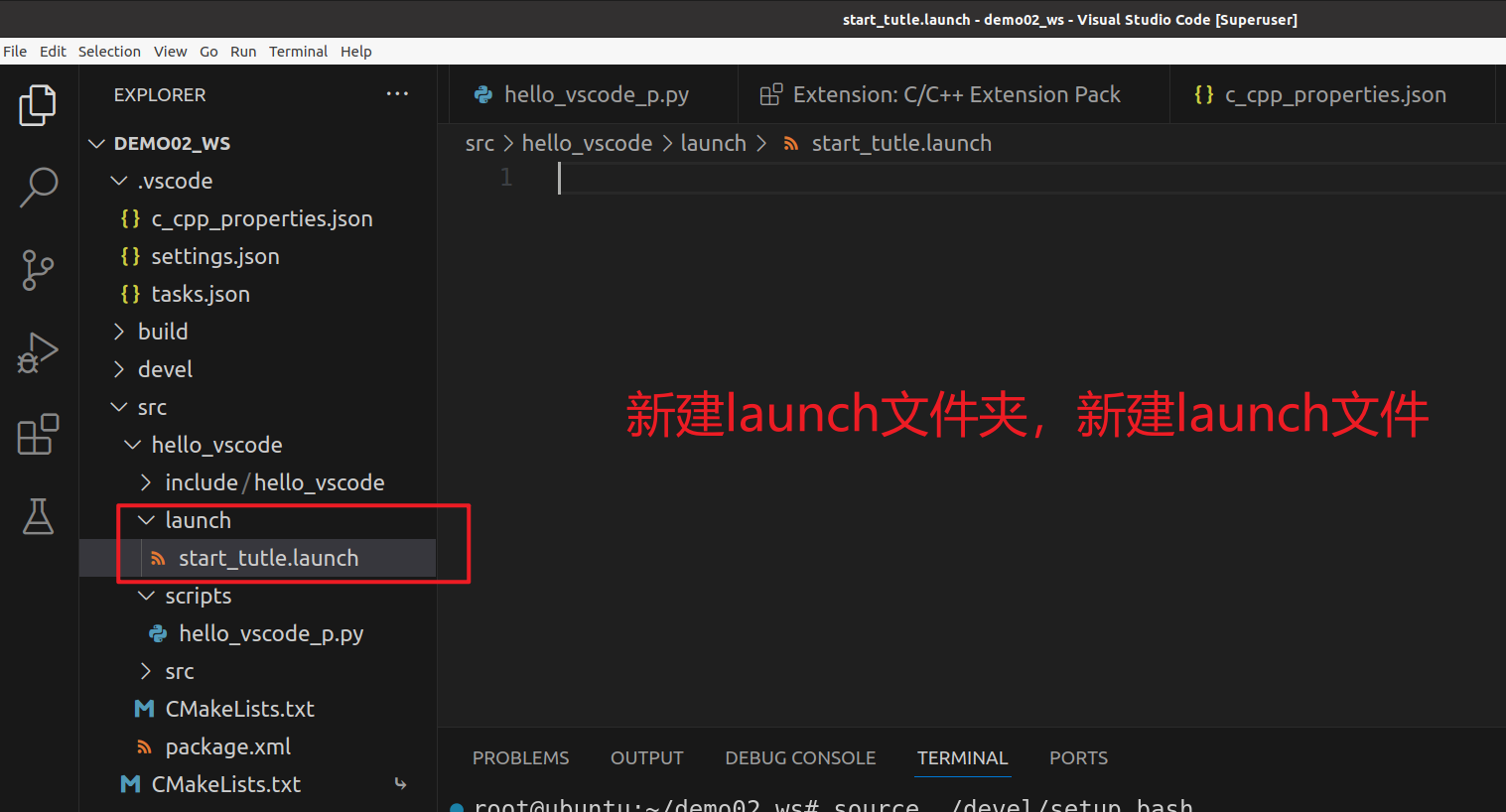
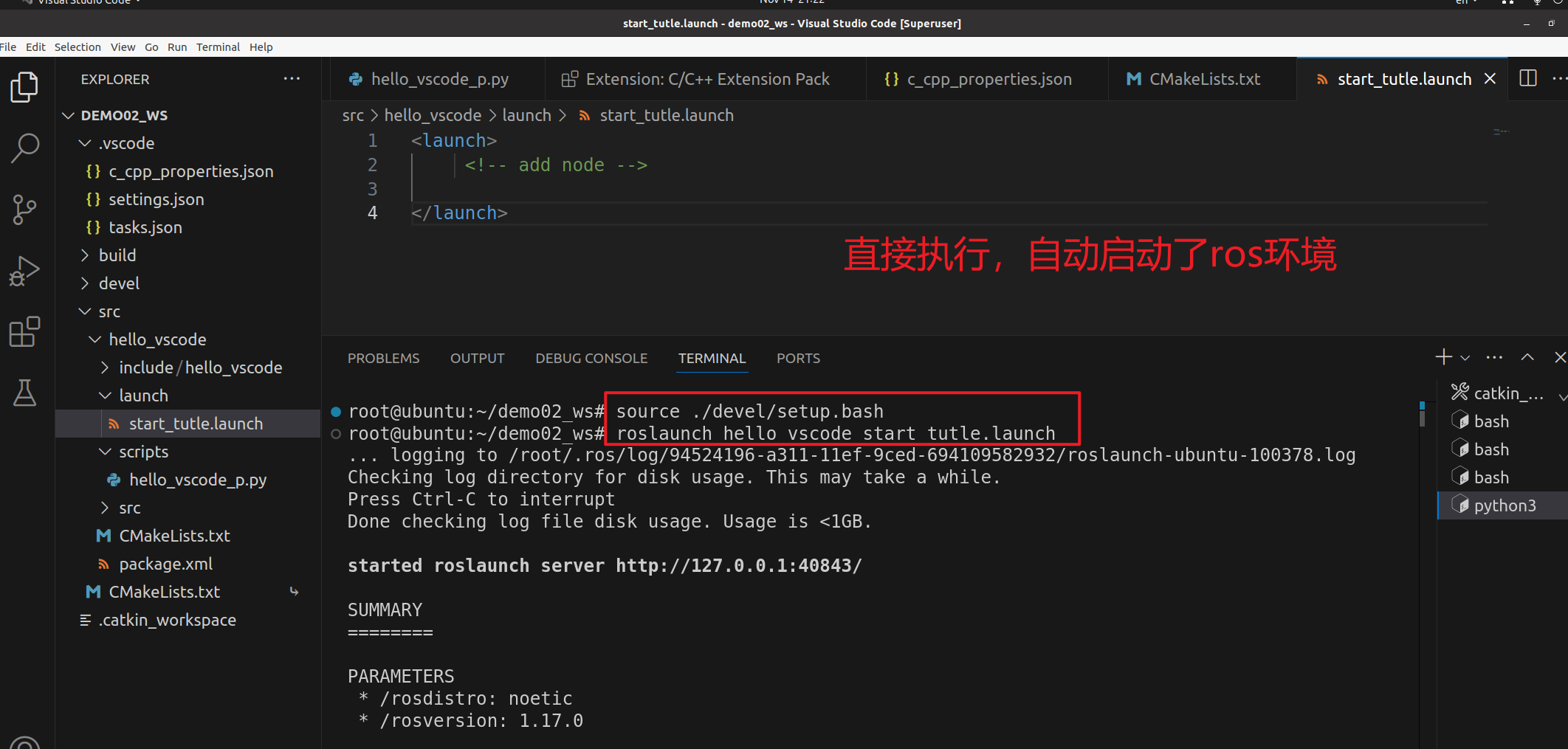
<launch>
<!-- add node -->
<!-- Tutle gui -->
<node pkg="turtlesim" type="turtlesim_node" name="t1"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="key1" />
</launch>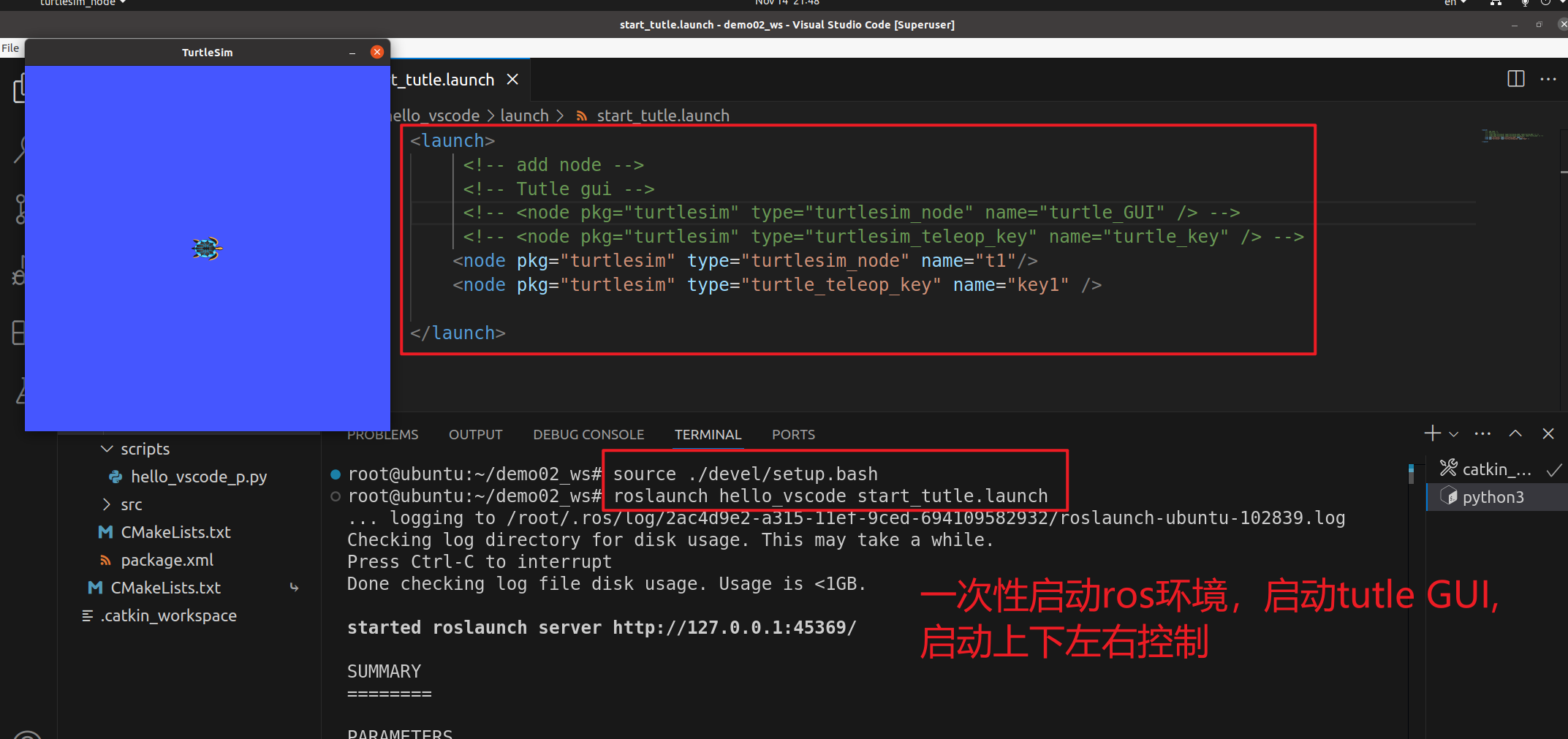
<node pkg= "hello_vscode" type="hello_vscode_c" name="hello" output="screen" />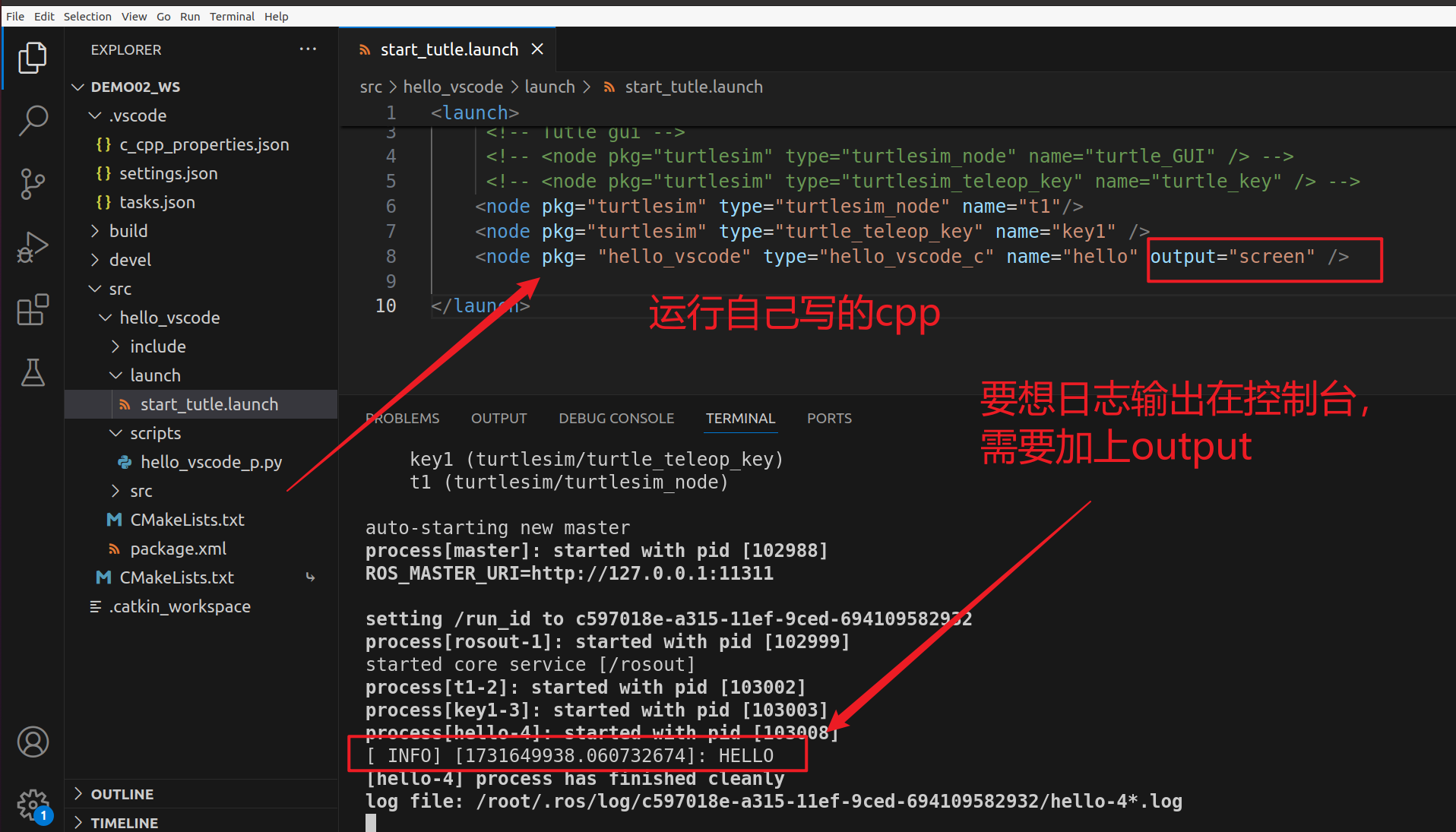
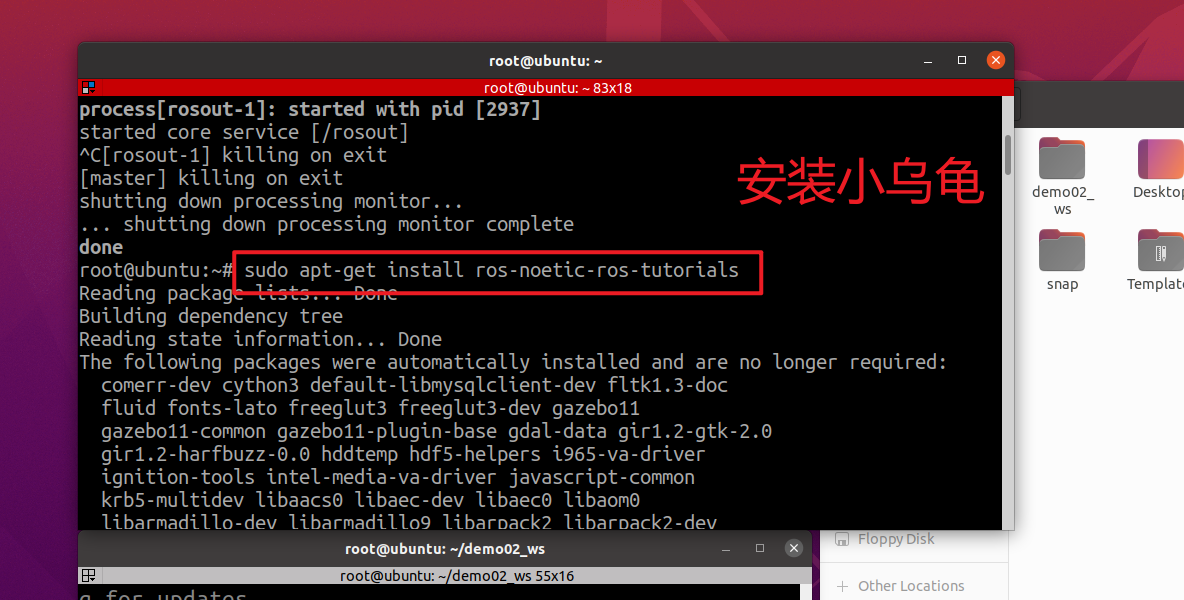
报错解决
ERROR: cannot launch node of type turtlesim/turtlesim_node: turtlesim
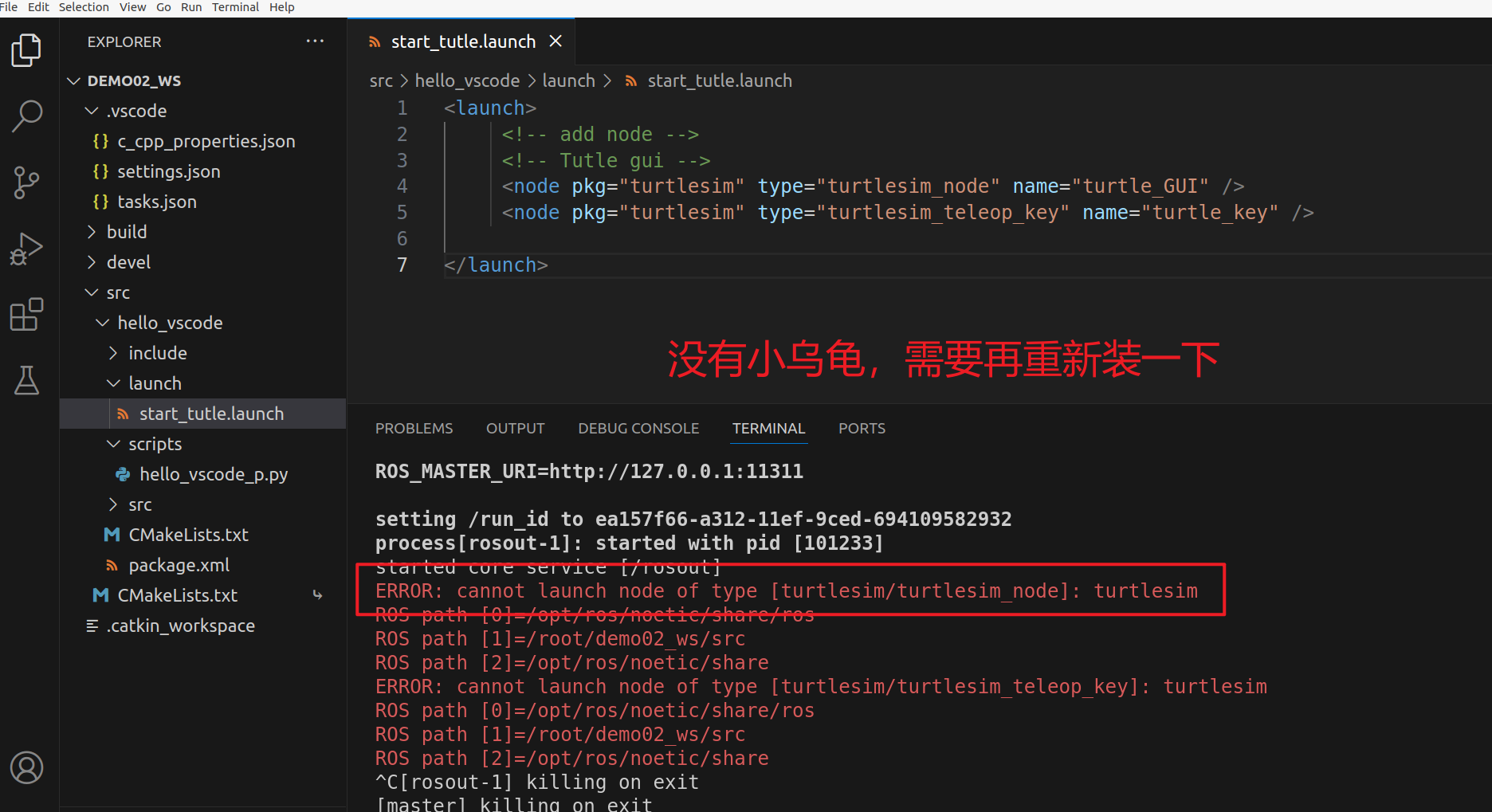
sudo apt-get install ros-noetic-ros-tutorials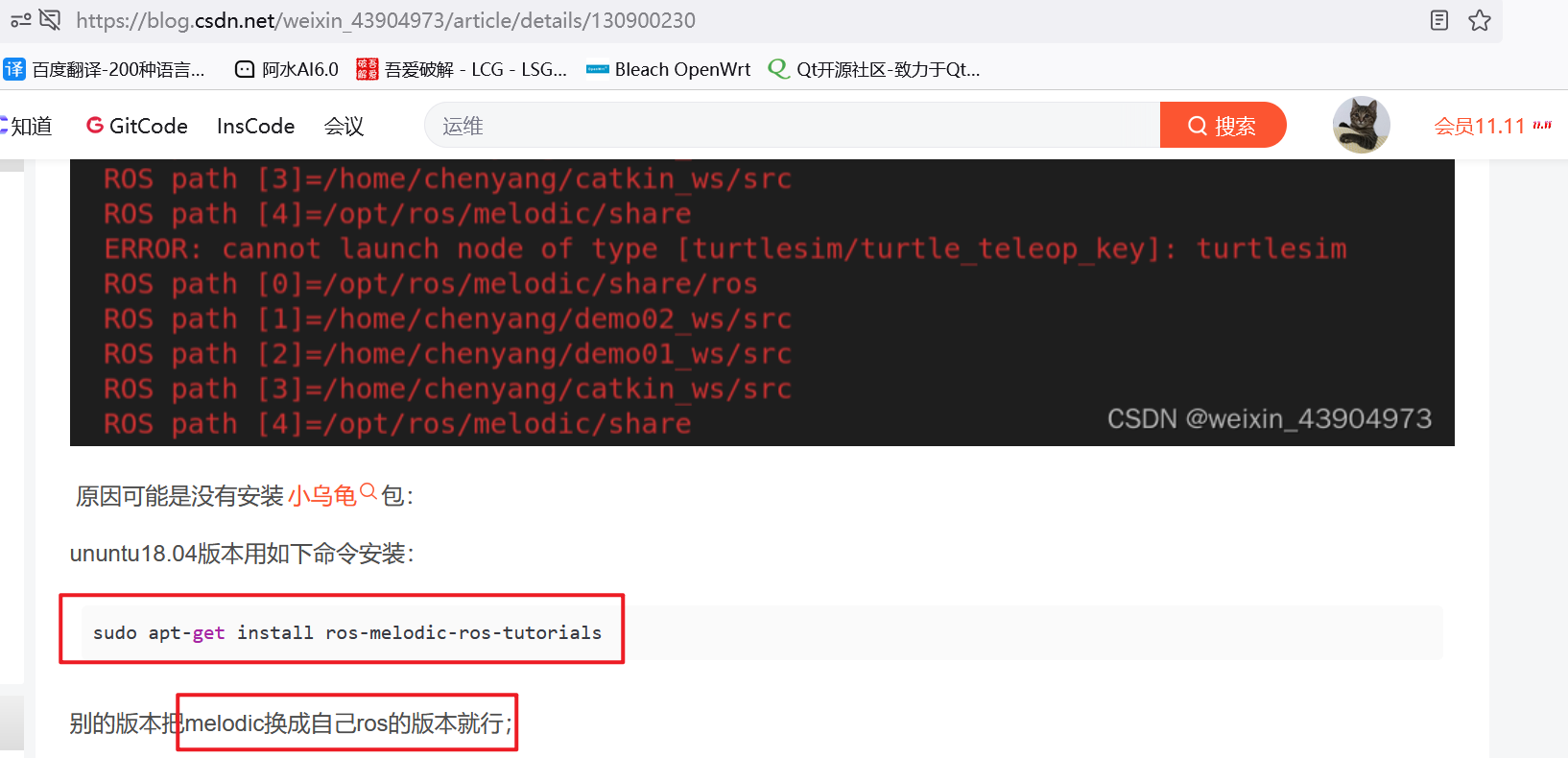
ERROR: cannot launch node of type turtlesim /turtlesim_node: turtlesim
ROS架构
ROS文件系统
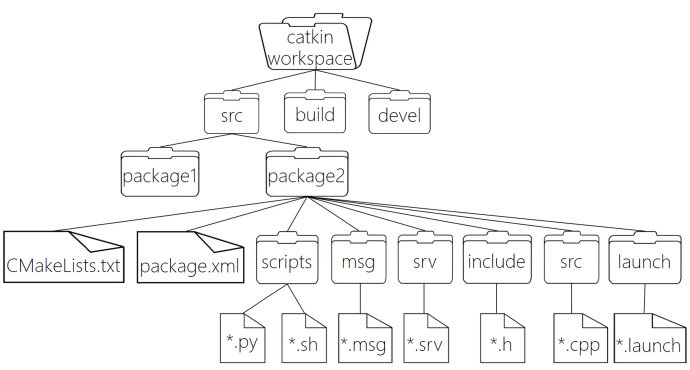
WorkSpace --- 自定义的工作空间
|--- build:编译空间,用于存放CMake和catkin的缓存信息、配置信息和其他中间文件。
|--- devel:开发空间,用于存放编译后生成的目标文件,包括头文件、动态&静态链接库、可执行文件等。
|--- src: 源码
|-- package:功能包(ROS基本单元)包含多个节点、库与配置文件,包名所有字母小写,只能由字母、数字与下划线组成
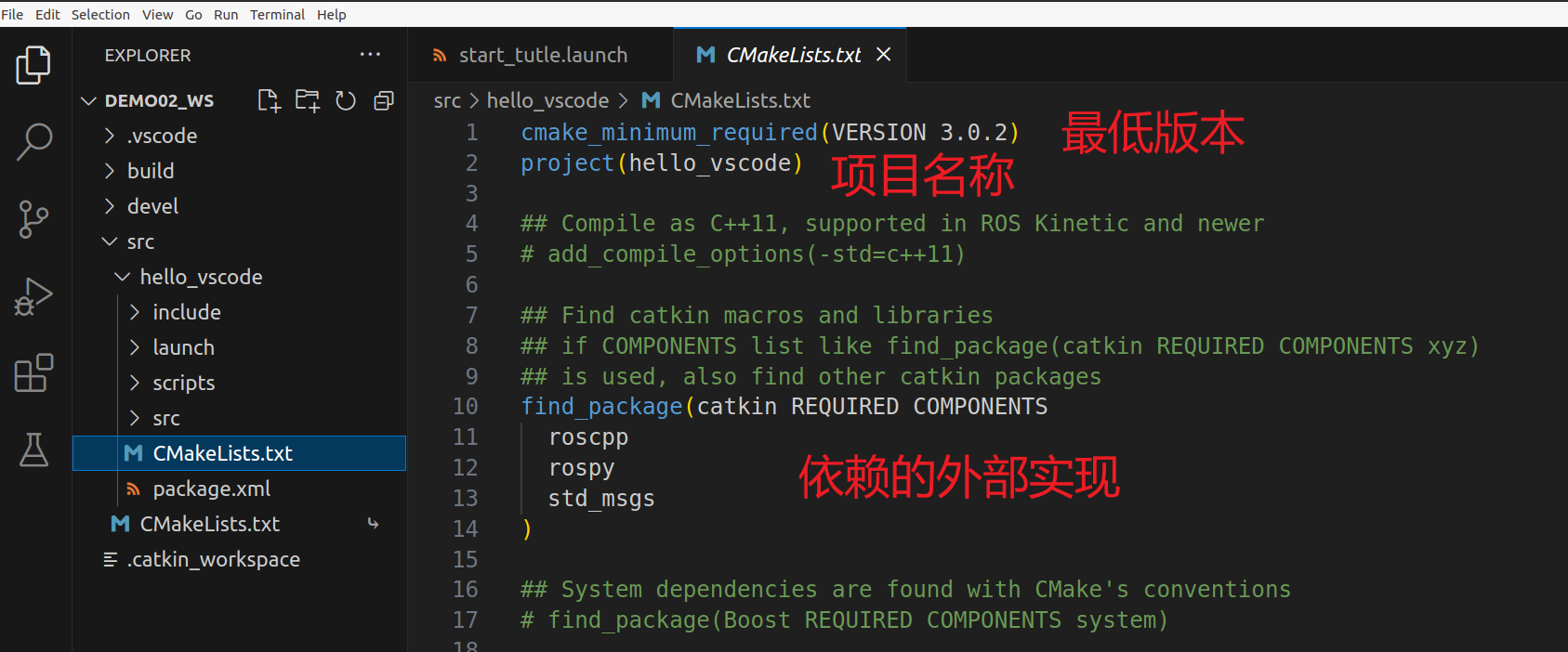
|-- CMakeLists.txt 配置编译规则,比如源文件、依赖项、目标文件
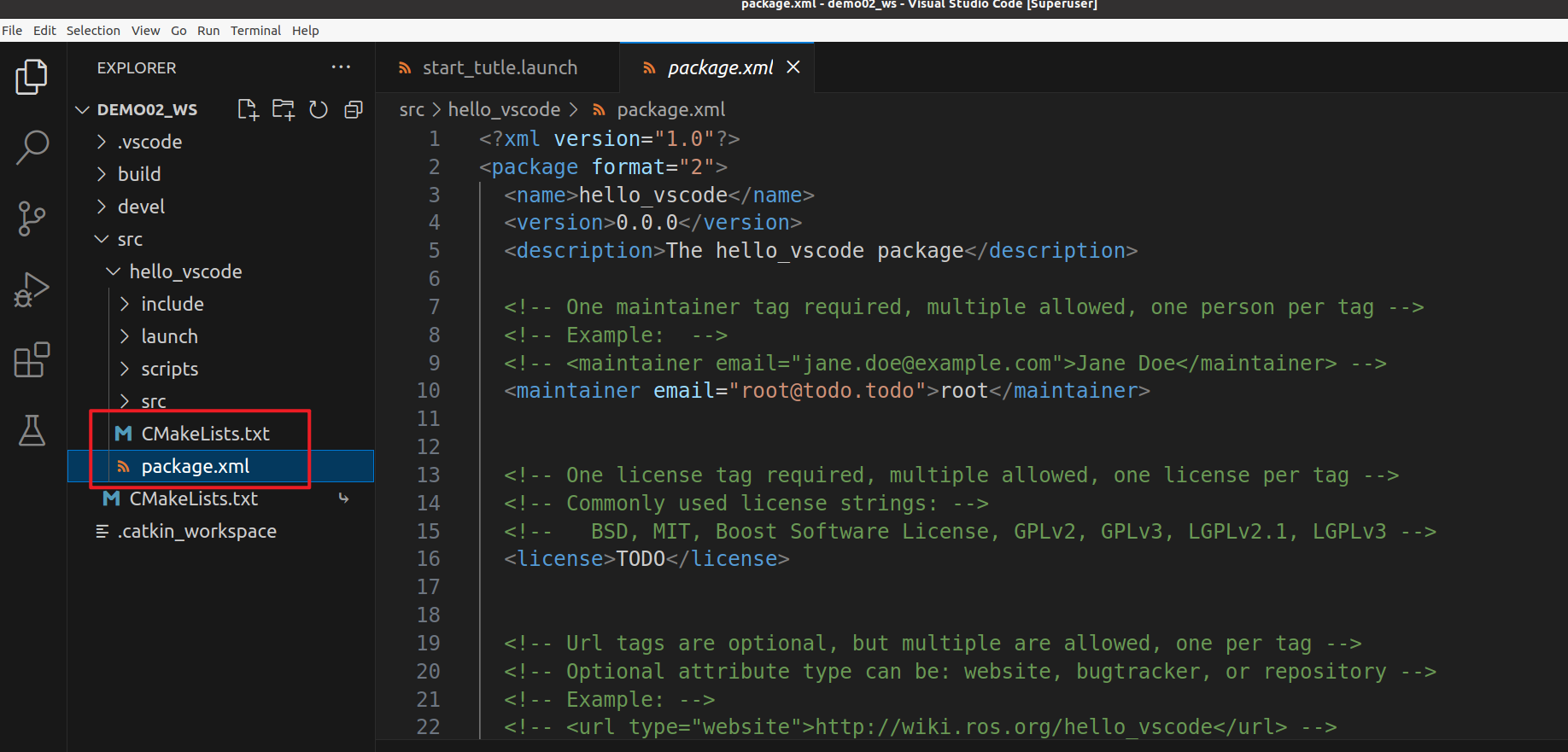
|-- package.xml 包信息,比如:包名、版本、作者、依赖项...(以前版本是 manifest.xml)
|-- scripts 存储python文件
|-- src 存储C++源文件
|-- include 头文件
|-- msg 消息通信格式文件
|-- srv 服务通信格式文件
|-- action 动作格式文件
|-- launch 可一次性运行多个节点
|-- config 配置信息
|-- CMakeLists.txt: 编译的基本配置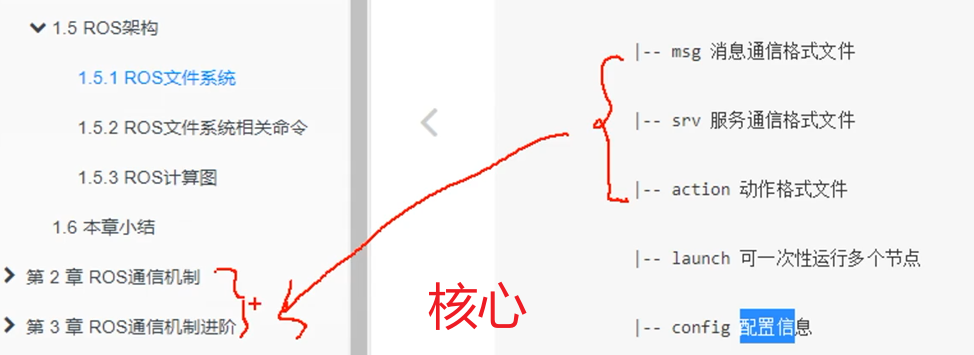
package.xml
CMakeList.txt
apt search ros-noetic-* | grep -i gmapping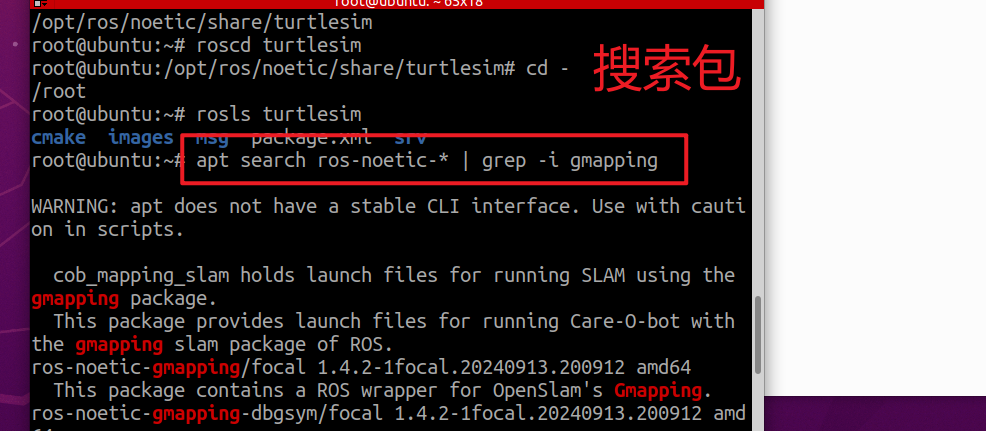
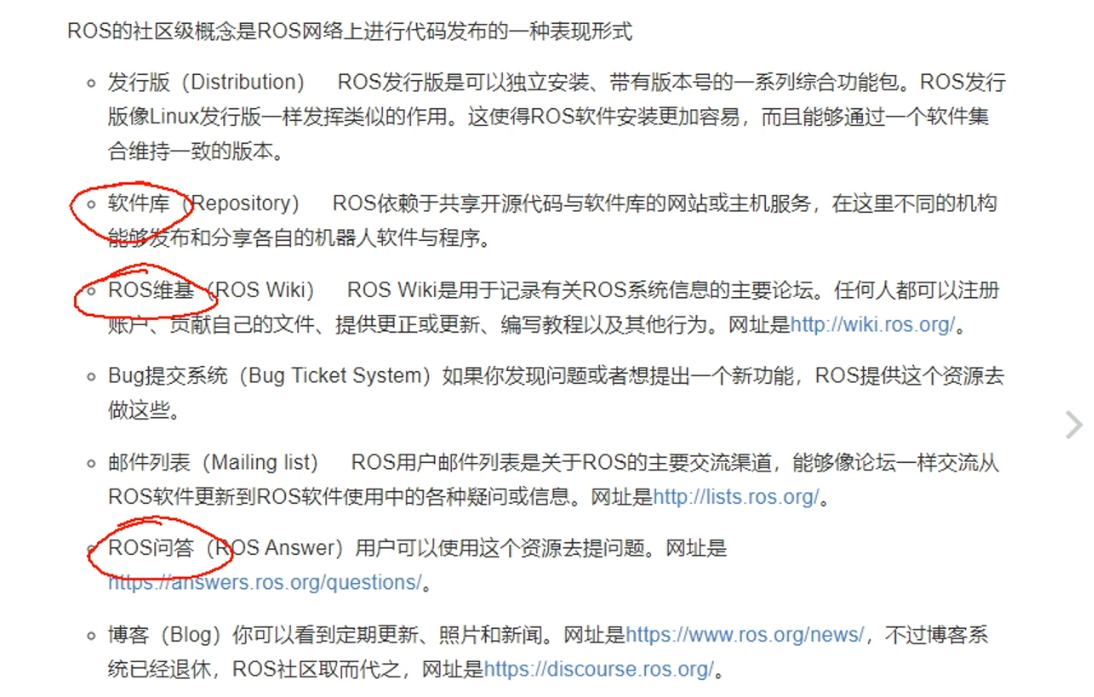
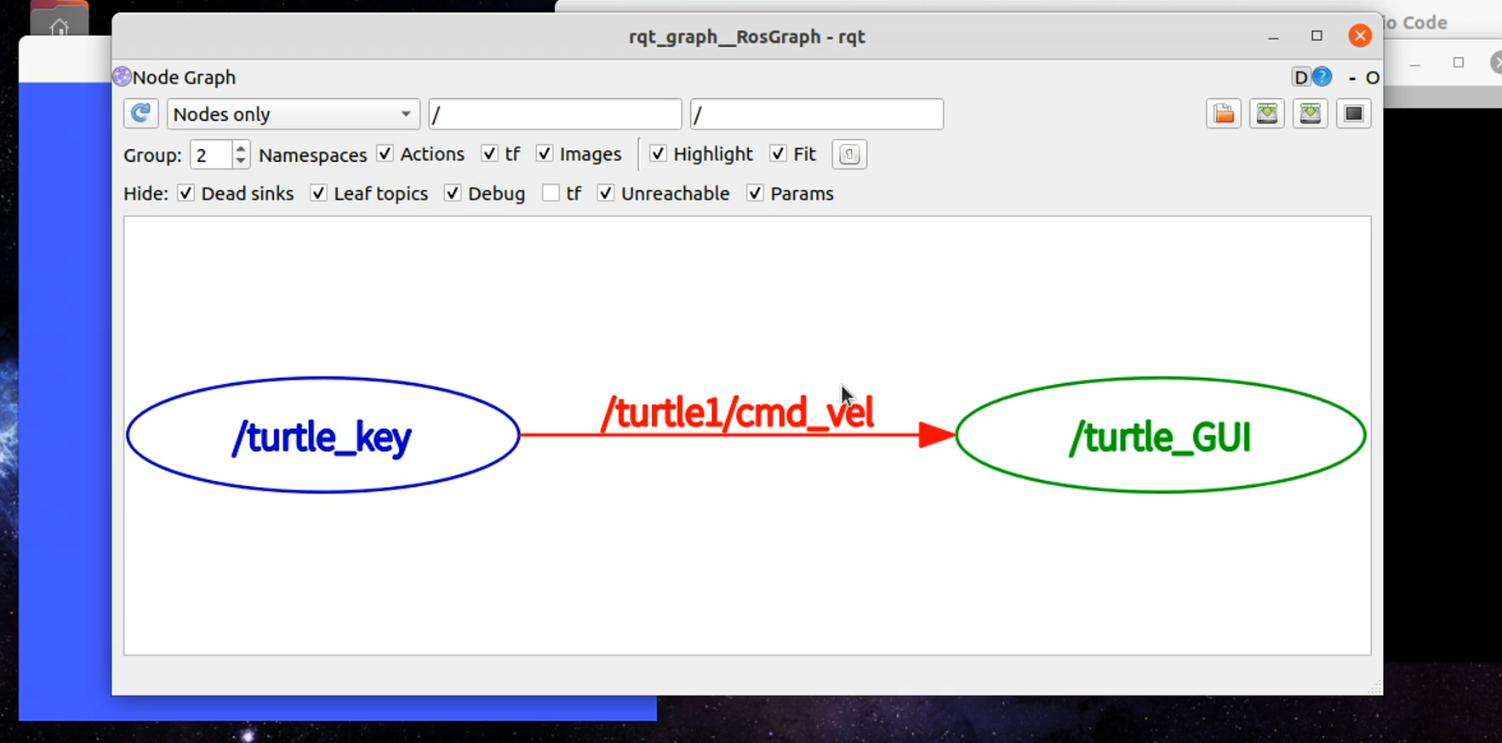
ROS计算图
总结
ROS学习——第1讲 ROS概述及环境搭建
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号