一文彻底搞懂ZAB算法,看这篇就够了!!!


最近需要设计一个分布式系统,需要一个中间件来存储共享的信息,来保证多个系统之间的数据一致性,调研了两个主流框架Zookeeper和ETCD,发现都能满足我们的系统需求。其中ETCD是K8s中采用的分布式存储,而其底层采用了RAFT算法来保证一致性,之前已经详细分析了Raft算法的原理,今天主要仔细分析下Zookeeper的底层算法-ZAB算法。
什么是ZAB 算法?
ZAB的全称是 Zookeeper Atomic Broadcast (Zookeeper原子广播)。Zookeeper 是通过 Zab 算法来保证分布式事务的最终一致性。
- Zab协议是为分布式协调服务Zookeeper专门设计的一种 支持崩溃恢复 的 原子广播协议 ,是Zookeeper保证数据一致性的核心算法。Zab借鉴了Paxos算法,但又不像Paxos那样,是一种通用的分布式一致性算法。它是特别为Zookeeper设计的支持崩溃恢复的原子广播协议。
- 在Zookeeper中主要依赖Zab协议来实现数据一致性,基于该协议,zk实现了一种主备模型(即Leader和Follower模型)的系统架构来保证集群中各个副本之间数据的一致性。 这里的主备系统架构模型,就是指只有一台客户端(Leader)负责处理外部的写事务请求,然后Leader客户端将数据同步到其他Follower节点。
客户端的读取流程:客户端会随机的链接到 zookeeper 集群中的一个节点,如果是读请求,就直接从当前节点中读取数据;如果是写请求,那么节点就会向 Leader 提交事务,Leader 接收到事务提交,会广播该事务,只要超过半数节点写入成功,该事务就会被提交。
深入ZAB算法
ZAB算法分为两大块内容,消息广播和崩溃恢复。
- 消息广播(boardcast):Zab 协议中,所有的写请求都由 leader 来处理。正常工作状态下,leader 接收请求并通过广播协议来处理。
- 崩溃恢复(recovery):当服务初次启动,或者 leader 节点挂了,系统就会进入恢复模式,直到选出了有合法数量 follower 的新 leader,然后新 leader 负责将整个系统同步到最新状态。
1. 消息广播
消息广播的过程实际上是一个简化的两阶段提交过程,这里对两阶段提交做一个简单的介绍。
两阶段提交
两阶段提交算法本身是一致强一致性算法,适合用作数据库的分布式事务,其实数据库的经常用到的TCC本身就是一种2PC。
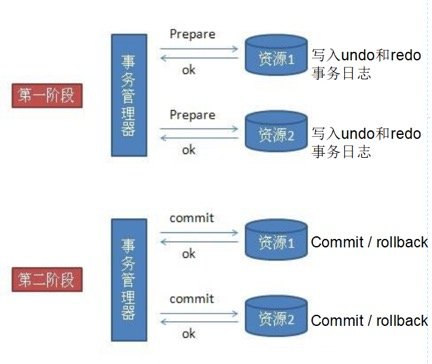
下面以MySQL中对数据库的修改过程,来介绍下两阶段提交的具体流程,在MySQL中对一条数据的修改操作首先写undo日志,记录的数据原来的样子,接下来执行事务修改操作,把数据写到redo日志里面,万一捅娄子,事务失败了,可从undo里面恢复数据。数据库通过undo与redo能保证数据的强一致性。
- 首先第一阶段叫准备节点,事务的请求都发送给一个个的资源,这里的资源可以是数据库,也可以是其他支持事务的框架,他们会分别执行自己的事务,写日志到undo与redo,但是不提交事务。
- 当事务管理器收到了所以资源的反馈,事务都执行没报错后,事务管理器再发送commit指令让资源把事务提交,一旦发现任何一个资源在准备阶段没有执行成功,事务管理器会发送rollback,让所有的资源都回滚。这就是2pc,非常简单。
说他是强一致性的是他需要保证任何一个资源都成功,整个分布式事务才成功。
优点:原理简单,实现方便 缺点:同步阻塞,单点问题,数据不一致,容错性不好
- 同步阻塞:在二阶段提交的过程中,所有的节点都在等待其他节点的响应,无法进行其他操作。这种同步阻塞极大的限制了分布式系统的性能。
- 单点问题:协调者在整个二阶段提交过程中很重要,如果协调者在提交阶段出现问题,那么整个流程将无法运转。更重要的是,其他参与者将会处于一直锁定事务资源的状态中,而无法继续完成事务操作。
- 数据不一致:假设当协调者向所有的参与者发送commit请求之后,发生了局部网络异常,或者是协调者在尚未发送完所有 commit请求之前自身发生了崩溃,导致最终只有部分参与者收到了commit请求。这将导致严重的数据不一致问题。
- 容错性不好:二阶段提交协议没有设计较为完善的容错机制,任意一个节点是失败都会导致整个事务的失败。
ZAB消息广播过程
Zookeeper集群中,存在以下三种角色的节点:
- *Leader:Zookeeper集群的核心角色,在集群启动或崩溃恢复中通过Follower参与选举产生,为客户端提供读写服务,并对事务请求进行处理。 Follower:Zookeeper集群的核心角色,在集群启动或崩溃恢复中参加选举,没有被选上就是这个角色,为客户端提供读取服务,也就是处理非事务请求,Follower不能处理事务请求,对于收到的事务请求会转发给Leader。 Observer:观察者角色,不参加选举,为客户端提供读取服务,处理非事务请求**,对于收到的事务请求会转发给Leader。使用Observer的目的是为了扩展系统,提高读取性能。
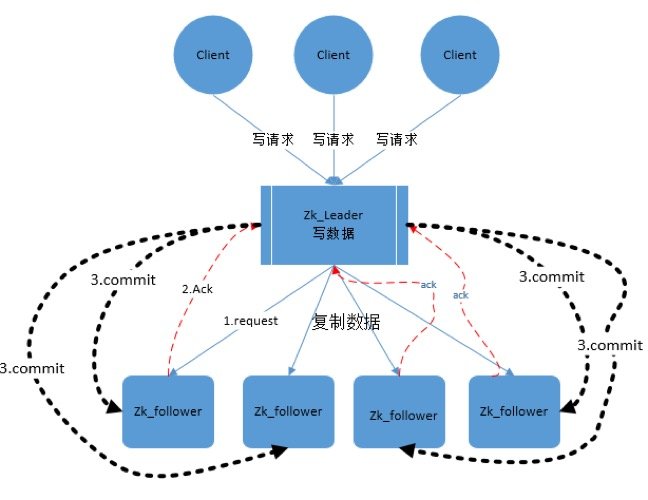
- Leader 接收到消息请求后,将消息赋予一个全局唯一的 64 位自增 id,叫做:zxid,通过 zxid 的大小比较即可实现因果有序这一特性。
- Leader 通过先进先出队列(通过 TCP 协议来实现,以此实现了全局有序这一特性)将带有 zxid 的消息作为一个提案(proposal)分发给所有 follower。
- 当 follower 接收到 proposal,先将 proposal 写到硬盘,写硬盘成功后再向 leader 回一个 ACK。
- 当 leader 接收到合法数量的 ACKs 后,leader 就向所有 follower 发送 COMMIT 命令,同时会在本地执行该消息。
- 当 follower 收到消息的 COMMIT 命令时,就会执行该消息。
相比于完整的二阶段提交,Zab 协议最大的区别就是不能终止事务,follower 要么回 ACK 给 leader,要么抛弃 leader,在某一时刻,leader 的状态与 follower 的状态很可能不一致,因此它不能处理 leader 挂掉的情况,所以 Zab 协议引入了恢复模式来处理这一问题。
从另一角度看,正因为 Zab 的广播过程不需要终止事务,也就是说不需要所有 follower 都返回 ACK 才能进行 COMMIT,而是只需要合法数量(2n+1 台服务器中的 n+1 台) 的follower,也提升了整体的性能。
Leader 服务器与每一个 Follower 服务器之间都维护了一个单独的 FIFO 消息队列进行收发消息,使用队列消息可以做到异步解耦。 Leader 和 Follower 之间只需要往队列中发消息即可。如果使用同步的方式会引起阻塞,性能要下降很多。
2. 崩溃恢复
崩溃恢复的主要任务就是选举Leader(Leader Election),Leader选举分两个场景:
- Zookeeper服务器启动时Leader选举。
- Zookeeper集群运行过程中Leader崩溃后的Leader选举。
选举参数
在介绍选举流程之前,需要介绍几个参数,
- myid: 服务器ID,这个是在安装Zookeeper时配置的,myid越大,该服务器在选举中被选为Leader的优先级会越大。ZAB算法中通过myid来规避了多个节点可能有相同zxid问题,注意可以对比之前的Raft算法,Raft算法中通过随机的timeout来规避多个节点可能同时成为Leader的问题。
- zxid: 事务ID,这个是由Zookeeper集群中的Leader节点进行Proposal时生成的全局唯一的事务ID,由于只有Leader才能进行Proposal,所以这个zxid很容易做到全局唯一且自增。因为Follower没有生成zxid的权限。zxid越大,表示当前节点上提交成功了最新的事务,这也是为什么在崩溃恢复的时候,需要优先考虑zxid的原因。
- epoch: 投票轮次,每完成一次Leader选举的投票,当前Leader节点的epoch会增加一次。在没有Leader时,本轮此的epoch会保持不变。
另外在选举的过程中,每个节点的当前状态会在以下几种状态之中进行转变。
LOOKING: 竞选状态。
FOLLOWING: 随从状态,同步Leader 状态,参与Leader选举的投票过程。
OBSERVING: 观察状态,同步Leader 状态,不参与Leader选举的投票过程。
LEADING: 领导者状态。选举流程
选举的流程如下:
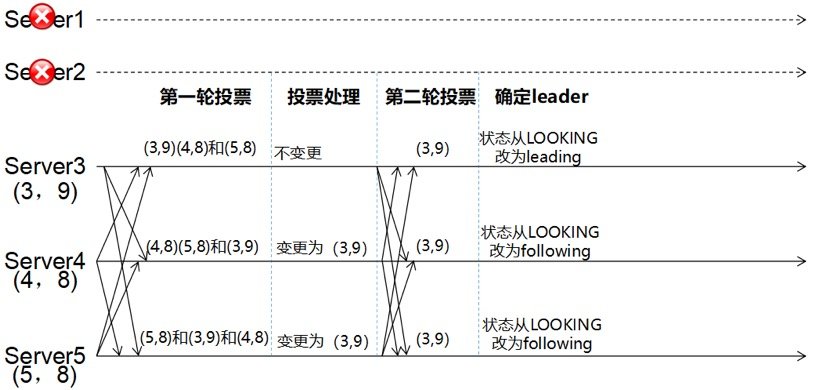
- 每个Server会发出一个投票,第一次都是投自己。投票信息:(myid,ZXID)
- 收集来自各个服务器的投票
- 处理投票并重新投票,处理逻辑:优先比较ZXID,然后比较myid
- 统计投票,只要超过半数的机器接收到同样的投票信息,就可以确定leader
- 改变服务器状态,进入正常的消息广播流程。
ZAB算法需要解决的两大问题
1. 已经被处理的消息不能丢
这一情况会出现在以下场景:当 leader 收到合法数量 follower 的 ACKs 后,就向各个 follower 广播 COMMIT 命令,同时也会在本地执行 COMMIT 并向连接的客户端返回「成功」。但是如果在各个 follower 在收到 COMMIT 命令前 leader 就挂了,导致剩下的服务器并没有执行都这条消息。
为了实现已经被处理的消息不能丢这个目的,Zab 的恢复模式使用了以下的策略:
- 选举拥有 proposal 最大值(即 zxid 最大) 的节点作为新的 leader:由于所有提案被 COMMIT 之前必须有合法数量的 follower ACK,即必须有合法数量的服务器的事务日志上有该提案的 proposal,因此,只要有合法数量的节点正常工作,就必然有一个节点保存了所有被 COMMIT 的 proposal。 而在选举Leader的过程中,会比较zxid,因此选举出来的Leader必然会包含所有被COMMIT的proposal。
- 新的 leader 将自己事务日志中 proposal 但未 COMMIT 的消息处理。
- 新的 leader 与 follower 建立先进先出的队列, 先将自身有而 follower 没有的 proposal 发送给 follower,再将这些 proposal 的 COMMIT 命令发送给 follower,以保证所有的 follower 都保存了所有的 proposal、所有的 follower 都处理了所有的消息。
2. 被丢弃的消息不能再次出现
这一情况会出现在以下场景:当 leader 接收到消息请求生成 proposal 后就挂了,其他 follower 并没有收到此 proposal,因此经过恢复模式重新选了 leader 后,这条消息是被跳过的。 此时,之前挂了的 leader 重新启动并注册成了 follower,他保留了被跳过消息的 proposal 状态,与整个系统的状态是不一致的,需要将其删除。
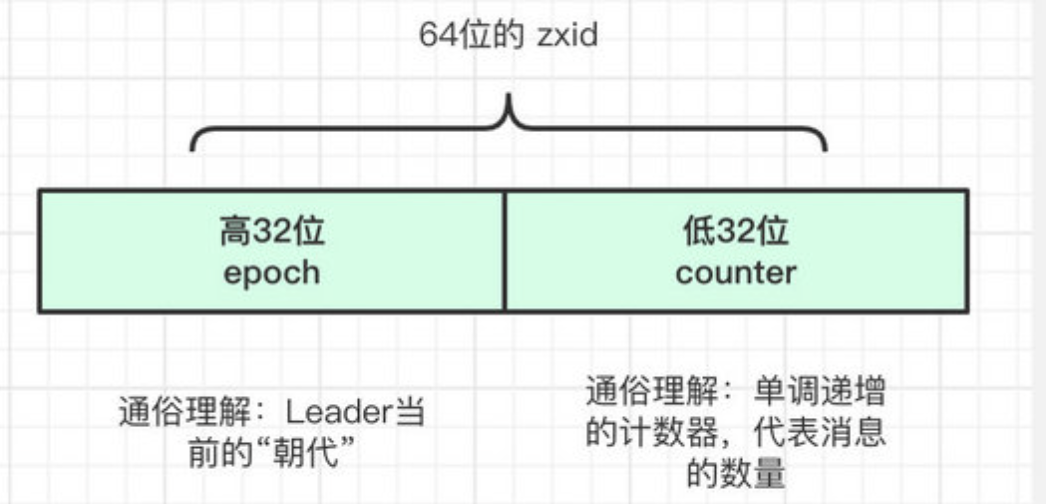
Zab 通过巧妙的设计 zxid 来实现这一目的。一个 zxid 是64位,高 32 是纪元(epoch)编号,每经过一次 leader 选举产生一个新的 leader,新 leader 会将 epoch 号 +1。低 32 位是消息计数器,每接收到一条消息这个值 +1,新 leader 选举后这个值重置为 0。这样设计的好处是旧的 leader 挂了后重启,它不会被选举为 leader,因为此时它的 zxid 肯定小于当前的新 leader。当旧的 leader 作为 follower 接入新的 leader 后,新的 leader 会让它将所有的拥有旧的 epoch 号的未被 COMMIT 的 proposal 清除。
Zab 协议设计的优秀之处有两点,一是简化二阶段提交,提升了在正常工作情况下的性能;二是巧妙地利用率自增序列,简化了异常恢复的逻辑,也很好地保证了顺序处理这一特性
参考:
本文参与 腾讯云自媒体同步曝光计划,分享自作者个人站点/博客。
原始发表:2023-04-29,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号