Local Planning Path-三次螺旋曲线

Local Planning Path-三次螺旋曲线

YoungTimes
发布于 2023-09-25 19:16:46
发布于 2023-09-25 19:16:46
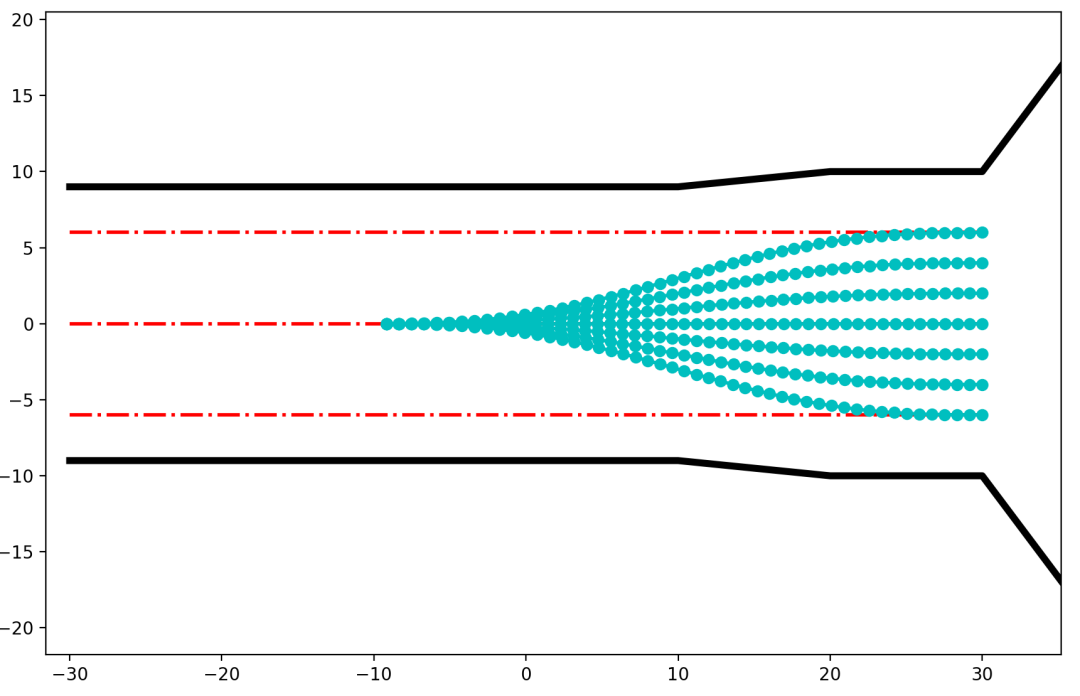
三次螺旋曲线效果
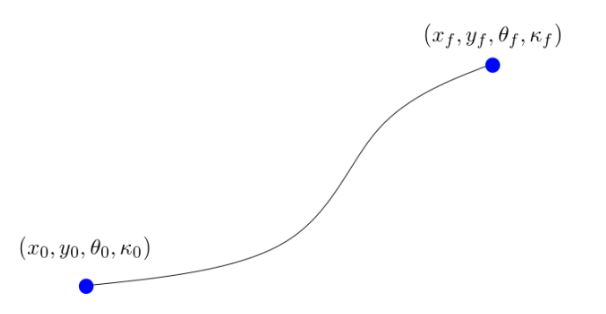
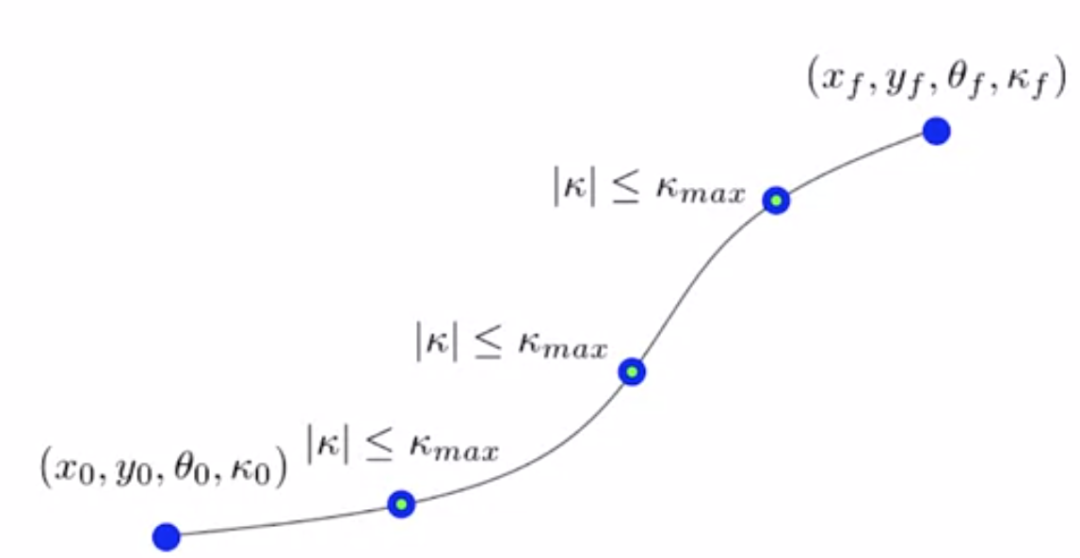
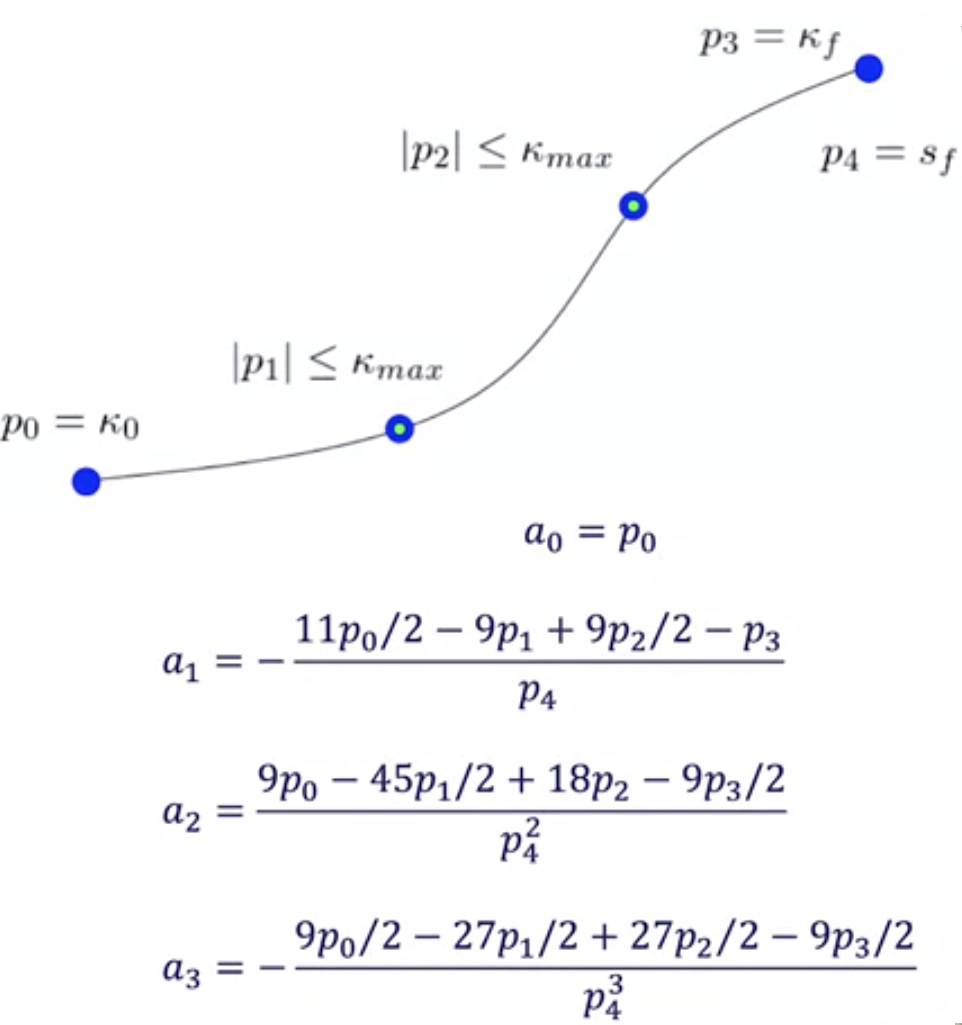
规划问题其实就是给定一个起点状态
,在满足运动学约束的前提下,找到一个达到终点状态
的路径。
多项式螺旋线
为了简化对优化问题的表示,我们将路径定义为参数曲线,多项式螺旋线(Polynomial Spirals)是参数曲线的一种。
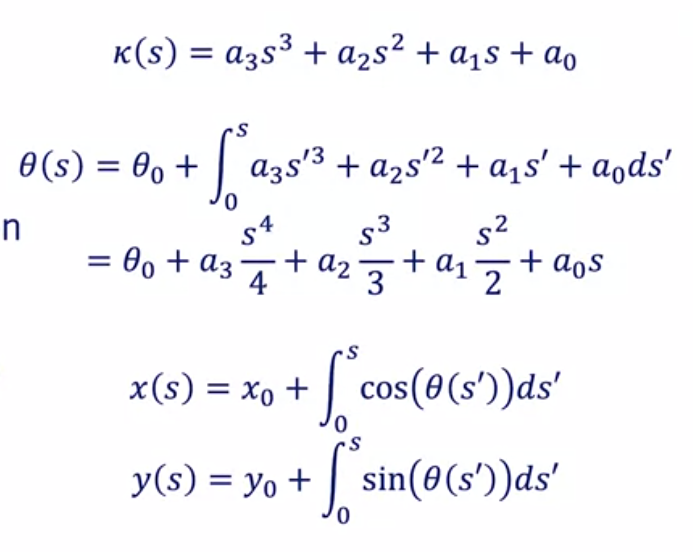
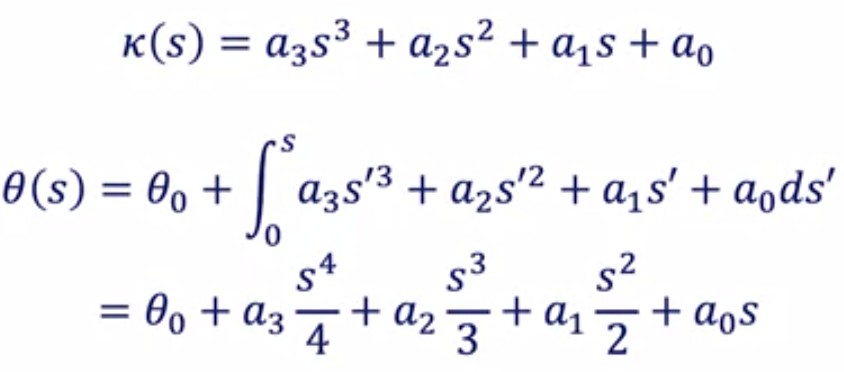
三次多项式螺旋线的定义如下:
它把曲率
定义为弧长
的函数。由于螺旋线是曲率的多项式函数,它的结构非常容易满足路径规划问题中的近似曲率约束,即通过限制螺旋线中几个点的曲率,就很可能满足了整个曲线上的曲率约束。
结合车辆运动学公式,可以得到:
来源[2]
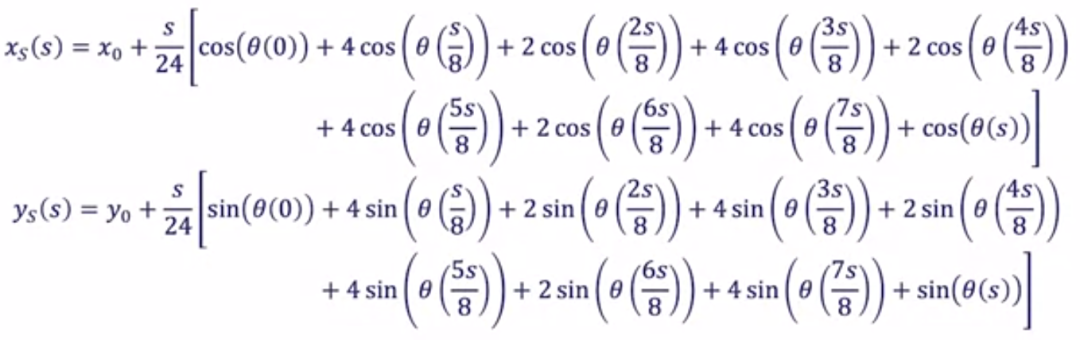
使用多项式螺旋的不足之处在于,螺旋线的位置和航向没有封闭解(Closed Form Solution),必须通过迭代优化生成满足边界条件的螺旋线,用数值逼近来计算螺旋的最终端点。辛普森公式(Simpson's Rule)是其中一种常用的数值积分工具,通常比其他形式上的数值方法更加精确。
辛普森公式
辛普森公式(Simpson's Rule)是一种用于近似计算定积分的数值积分方法。
辛普森公式的具体计算公式为:
其中,h =(b-a)/n,其中n为分段的数量。
def simpson_rule(self, f, a, b, n):\
"""
f: 要积分的函数
a: 积分下限
b: 积分上限
n: 迭代次数
"""
h = (b - a) / n # 计算步长
x = [a + i * h for i in range(n + 1)] # 生成分割点
y = [f(xi) for xi in x] # 计算每个分割点处的函数值
# 根据辛普森公式进行计算
I = h / 3 * (y[0] + 4 * sum(y[1:-1:2]) + 2 * sum(y[2:-1:2]) + y[-1])
return I
对三次螺旋线应用辛普森公式(Simpson's Rule),得到:
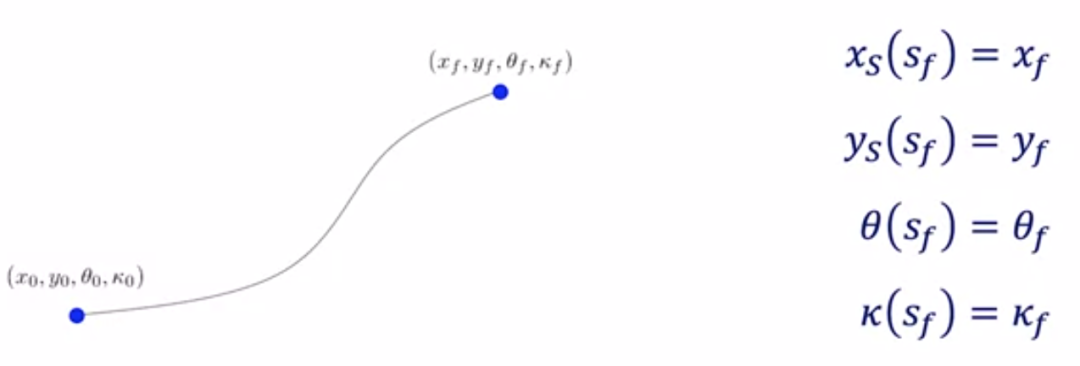
边界约束(Boundary Condition)
基于三次Spiral的终点边界条件约束如下:
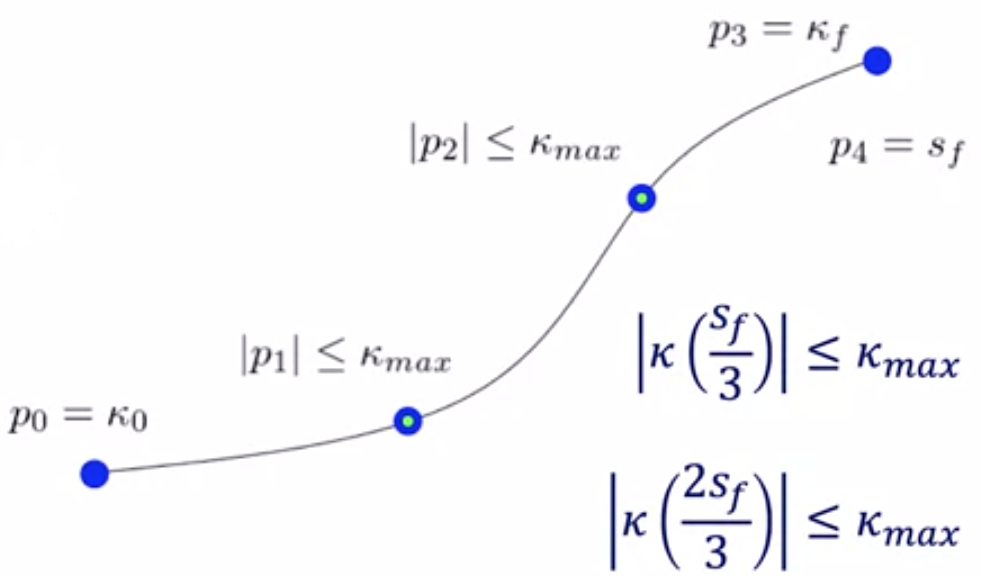
曲率约束可以保证车辆的安全行驶和乘坐舒适性,假设汽车的最小转弯半径是2m,则局部路径的最大曲率是0.5。由于螺旋曲线的性质,只要采样几个均匀间隔的点,并对采样点施加曲率约束,就可以生成满足曲率限制的螺旋线。
优化目标函数
我们期望规划得到的路径是平稳舒适的, 这可以通过最小化我们规划的参数曲线的“弯曲能量”来完成,曲线的“弯曲能量”是指沿着路径的整个弧长的平方曲率的积分。
同时为了保证优化的最终位置和朝向与目标最终位置和朝向相同,将与目标位置和朝向的差值也作为惩罚项。
其中:
def objective(self, p):
p = [0.0, p[0], p[1], 0.0, p[2]]
return self.fbe(p) + 25.0 * (self.fxf(p)**2.0 + self.fyf(p)**2.0) + 30.0 * self.ftf(p)**2.0
参数重映射
三次多项式螺旋能够保持曲率的连续性,但是因为参数尺度的差异性,会导致不连续的转向率(steering rate)。在低速度场景下,该误差可以被忽略,但是在高速度场景下,会造成很大的误差。
因此,可以通过下面两种方法提高路径的稳定性
- 参数优化模型
- 五次多项式螺旋
稳定路径模型本文主要考虑参数化优化模型。为了建立稳定路径模型用于数值求解,定义一组新的参数为:
并根据:
得到:
不难发现:
因此只要通过优化方式找到三个参数
。
Python优化求解
SciPy优化库可以用来解决通用非线性优化问题。
result = scipy.optimize.minimize(objective_function,
x_0,
method='L-BFGS-B',
jac=objective_jacobian,
bounds=bounds,
options={'disp' : True}
)
其中需要提供Jacobin矩阵。目标函数的Jacobin函数如下:
def objective_grad(self, p):
p = [0.0, p[0], p[1], 0.0, p[2]]
return np.add(np.add(np.add(self.fbe_grad(p), np.multiply(25, self.fxf_grad(p))), \
np.multiply(25, self.fyf_grad(p))), np.multiply(30, self.ftf_grad(p)))
jacobin推导过程中,对
的偏导推了好多遍才算对。
目标函数fbe部分的Jacobin计算:
def fbe_grad(self, p):
grad = [0.0, 0.0, 0.0]
num = self._integrate_steps
delta = (p[4] - self._s0) / num
for i in range(num + 1):
s = self._s0 + i * delta
param = delta / 3.0
if (i > 0 and i != num and i % 2 == 0):
param = param * 2
elif (i > 0 and i != num and i % 2 == 1):
param = param * 4
# print(self.curvature(s, p))
grad[0] += (9.0 / p[4] * s \
- 22.5 / (p[4]**2) * s**2 \
+ 13.5 / (p[4]**3) * s**3) * self.curvature(s, p) * 2.0 * param
grad[1] += (-9.0 / (2 * p[4]) * s \
+ 18.0 / (p[4]**2) * (s**2) \
- 27.0 / (2 * p[4]**3) * (s**3)) * self.curvature(s, p) * 2.0 * param
grad[2] += (1.0 / (p[4]**2) * (5.5 * p[0] -9.0 * p[1] + 4.5 * p[2] - p[3]) * s \
- 2.0 / (p[4]**3) * (9 * p[0] - 22.5 * p[1] + 18 * p[2] - 4.5 * p[3]) * (s**2) \
+ 3.0 / (p[4]**4) * (4.5 * p[0] - 13.5 * p[1] + 13.5 * p[2] - 4.5 * p[3]) * (s**3)) * self.curvature(s, p) * 2.0 * param
return grad
目标函数x部分的Jacobin计算:
def fxf_grad(self, p):
grad = [0.0, 0.0, 0.0]
num = self._integrate_steps
delta = (p[4] - self._s0) / num
grad_2_1 = 0.0
grad_2_2 = 0.0
grad_2_param = 1.0
for i in range(num + 1):
s = self._s0 + i * delta
param = delta / 3.0
if (i > 0 and i != num and i % 2 == 0):
param = param * 2
grad_2_param = 2.0
elif (i > 0 and i != num and i % 2 == 1):
param = param * 4
grad_2_param = 4.0
grad[0] += (-9.0 / p[4] * (s**2 / 2.0) \
+ 22.5 / (p[4]**2) * (s**3 / 3.0) \
- 13.5 / (p[4]**3) * (s**4 / 4.0)) * np.sin(self.theta(s, p)) * self.fxf(p) * 2 * param
grad[1] += (4.5 / p[4] * (s**2 / 2.0) \
- 18.0 / (p[4]**2) * (s**3 / 3.0) \
+ 13.5 / p[4]**3 * (s**4 / 4.0)) * np.sin(self.theta(s, p)) * self.fxf(p) * 2 * param
grad_2_1 += (-1.0 / (p[4]**2) * (5.5 * p[0] - 9.0 * p[1] + 4.5 * p[2] - p[3]) * (s**2 / 2.0) \
+ (2.0 / (p[4]**3)) * (9 * p[0] - 22.5 * p[1] + 18.0 * p[2] - 4.5 * p[3]) * (s**3 / 3.0) \
- (3.0 / (p[4]**4)) * (4.5 * p[0] - 13.5 * p[1] + 13.5 * p[2] - 4.5 * p[3]) * (s**4 / 4.0)) * np.sin(self.theta(s, p)) * param
grad_2_2 += 1.0 / (3.0 * num) * np.cos(self.theta(s, p)) * grad_2_param
grad[2] = (grad_2_1 + grad_2_2) * self.fxf(p) * 2
return grad
目标函数y部分的Jacobin计算:
def fyf_grad(self, p):
grad = [0.0, 0.0, 0.0]
num = self._integrate_steps
delta = (p[4] - self._s0) / num
# tst = 0.0
grad_2_1 = 0.0
grad_2_2 = 0.0
for i in range(num + 1):
s = self._s0 + i * delta
# print("i="+str(i))
param = delta / 3.0
grad_2_param = 1.0
if (i > 0 and i != num and i % 2 == 0):
param = param * 2
grad_2_param = 2.0
elif (i > 0 and i != num and i % 2 == 1):
param = param * 4
grad_2_param = 4.0
grad[0] += (9.0 / p[4] * (s**2 / 2.0) \
- 22.5 / (p[4]**2) * (s**3 / 3.0) \
+ 13.5 / (p[4]**3) * (s**4 / 4.0)) * np.cos(self.theta(s, p)) * 2 * self.fyf(p) * param
grad[1] += (-4.5 / p[4] * (s**2 / 2.0) \
+ 18.0 / p[4]**2 * (s**3 / 3.0) \
- 13.5 / p[4]**3 * (s**4 / 4.0)) * np.cos(self.theta(s, p)) * 2 * self.fyf(p) * param
grad_2_1 += ((1.0 / p[4]**2.0) * (11.0 / 2.0 * p[0] - 18.0 / 2.0 * p[1] + 9.0 / 2.0 * p[2] - p[3]) * (s**2 / 2.0) \
- (2.0 / p[4]**3.0) * (9.0 * p[0] - 22.5 * p[1] + 18.0 * p[2] - 4.5 * p[3]) * (s**3 / 3.0) \
+ (3.0 / p[4]**4.0) * (4.5 * p[0] - 13.5 * p[1] + 13.5 * p[2] - 4.5 * p[3]) * (s**4 / 4.0)) * np.cos(self.theta(s, p)) * param \
grad_2_2 += 1.0 / (3.0 * num) * np.sin(self.theta(s, p)) * grad_2_param
grad[2] = (grad_2_1 + grad_2_2) * 2 * self.fyf(p)
return grad
目标函数
部分的Jacobin计算:
def ftf_grad(self, p):
grad = [0.0, 0.0, 0.0]
s = p[4]
grad[0] += 9.0 / p[4] * (s**2 /2.0) * 2 * self.ftf(p) \
- 22.5 / (p[4]**2) * (s**3 / 3.0) * 2 * self.ftf(p) \
+ 13.5 / (p[4]**3) * (s**4 / 4.0) * 2 * self.ftf(p)
grad[1] += -9.0 / (2 * p[4]) * (s**2 / 2.0) * 2 * self.ftf(p) \
+ 18.0 / (p[4]**2) * (s**3 / 3.0) * 2 * self.ftf(p) \
- 27.0 / (2 * p[4]**3) * (s**4 / 4.0) * 2 * self.ftf(p)
grad[2] += 1.0 / (p[4]**2) * (5.5 * p[0] - 9.0 * p[1] + 4.5 * p[2] + p[3]) * (s**2 / 2.0) * 2 * self.ftf(p) \
- 2.0 / (p[4]**3) * (9 * p[0] - 22.5 * p[1] + 18 * p[2] - 4.5 * p[3]) * (s**3 / 3.0) * 2 * self.ftf(p) \
+ 3.0 / (p[4]**4) * (4.5 * p[0] - 13.5 * p[1] + 13.5 * p[2] - 4.5 * p[3]) * (s**4 / 4.0) * 2 * self.ftf(p)
return grad
至此,输入目标状态
,就可以得到从起点状态到终点状态的Local Planning Path。
参考材料
1、[PathPlanning]State Lattice Plannerhttps://blog.csdn.net/qq_28366817/article/details/129330967?utm_medium=distribute.pc_relevant.none-task-blog-2~default~baidujs_baidulandingword~default-0-129330967-blog-117754864.235^v38^pc_relevant_anti_vip&spm=1001.2101.3001.4242.1&utm_relevant_index=3
2、Udacity自动驾驶课程 https://www.coursera.org/learn/motion-planning-self-driving-cars/lecture/l4Aab/lesson-1-parametric-curves
3、https://zhuanlan.zhihu.com/p/93980119?utm_id=0
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2023-09-24 21:18,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号