君正T31开发应用12:YUV和RAW数据
原创
君正T31开发应用12:YUV和RAW数据
原创
春江花月夜
发布于 2023-06-22 11:27:38
发布于 2023-06-22 11:27:38
1.什么是YUV数据和RAW数据?
1.1RAW数据
RAW数据是sensor出来的最原始的数据。
是没有办法直接使用的,还要在host端做ISP,做色彩纠正,增强,HDR,插值成RGB,转成YUV,最后再使用。
1.2:RGB数据
三原色数据,红绿蓝数据,常用的数据格式有
RGB888,真彩色,RGB565,RGB555等等格式,其中RGB888为真彩色,占用24位数据,而RGB565占用16位数据,大部分人体眼睛不会对色彩如此敏感,所以一般只需要使用RGB565格式即可。
1.3:YUV数据:
虽然所有的图像都可以选择RGB格式去表示,但是RGB图像对黑白图像的支持并不是很好。
因此大多数情况下,我们需要把RGB转成YUV格式。
YUV中的Y表示明亮度,就是灰度图,U和V分别对应Cb和Cr,代表色度,作用是描述影像色彩以及饱和度,用于指定像素的颜色。
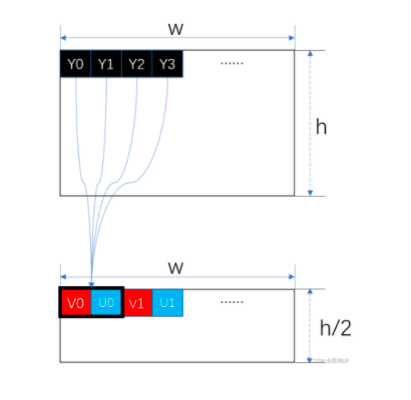
- NV12
NV12和NV21相比,差别只在于UVpalne里,两者UV的交替顺序是反的,NV12是VU交替。其余的和NV21是一样的,也是4个Y分量对应同一组UV分量;实际上就是我们常说的YUV:4:2:0 4个Y分量的数据,2个U和V分量的数据。大概占的空间是12位的数据。
2:君正T31如何获取YUV和RAW数据
2.1:关键属性:设置通道属性为YUV属性或者RAW属性
RAW数据
fs_chn_attr[0].pixFmt = PIX_FMT_RAW;
ret = IMP_FrameSource_SetChnAttr(0, &fs_chn_attr[0]);
if (ret < 0) {
IMP_LOG_ERR(TAG, "%s(%d):IMP_FrameSource_SetChnAttr failed\n", __func__, __LINE__);
return -1;
}YUV数据
/* Step.3 Snap raw config */
ret = IMP_FrameSource_GetChnAttr(0, &fs_chn_attr[0]);
if (ret < 0) {
IMP_LOG_ERR(TAG, "%s(%d):IMP_FrameSource_GetChnAttr failed\n", __func__, __LINE__);
return -1;
}
fs_chn_attr[0].pixFmt = PIX_FMT_NV12;//PIX_FMT_YUYV422;
ret = IMP_FrameSource_SetChnAttr(0, &fs_chn_attr[0]);
if (ret < 0) {
IMP_LOG_ERR(TAG, "%s(%d):IMP_FrameSource_SetChnAttr failed\n", __func__, __LINE__);
return -1;
}
/* Step.3 config sensor reg to output colrbar raw data*/
/* to do */
/* Step.4 Stream On */
if (chn[0].enable){
ret = IMP_FrameSource_EnableChn(chn[0].index);
if (ret < 0) {
IMP_LOG_ERR(TAG, "IMP_FrameSource_EnableChn(%d) error: %d\n", ret, chn[0].index);
return -1;
}
}2.2:获取YUV图像数据&RAW数据
int m = 0;
for (m=1;m<=51;m++) {
ret = IMP_FrameSource_GetFrame(0, &frame_bak);
if (ret < 0) {
IMP_LOG_ERR(TAG, "%s(%d):IMP_FrameSource_GetFrame failed\n", __func__, __LINE__);
return -1;
}
if(m%50==0) {
fwrite((void *)frame_bak->virAddr, frame_bak->size, 1, fp);
fclose(fp);
}
IMP_FrameSource_ReleaseFrame(0, frame_bak);
if (ret < 0) {
IMP_LOG_ERR(TAG, "%s(%d):IMP_FrameSource_ReleaseFrame failed\n", __func__, __LINE__);
return -1;
}
}2.3:释放资源
跟原来的反初始化是一样的,不再赘述。
3:实验现象
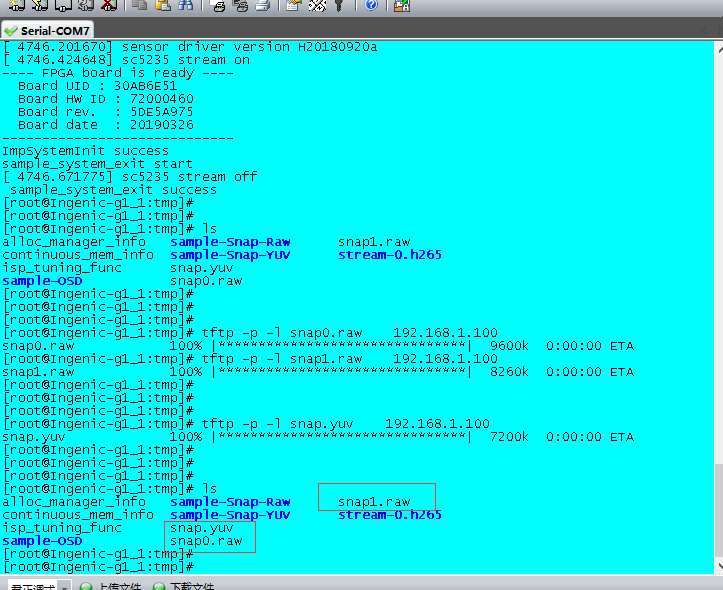
在没有进行压缩的情况下RAW数据是及其大的,远远比JPEG要大太多了,所以我们一般网络传输的过程中都是使用JPEG格式的图片进行传输,节省带宽。
在图像质量不达标的时候,我们才会去保存RAW数据和YUV数据去分析图像质量的问题。
大小对比。一般是五百万的像素的照片:
JPEG:105KB
YUV:7200KB
RAW:9600KB
下面是YUV图像实际的效果图。

附录:截图YUV完整代码:
/*
* sample-snap-raw.c
*
* Copyright (C) 2018 Ingenic Semiconductor Co.,Ltd
*/
#include <imp/imp_log.h>
#include <imp/imp_common.h>
#include <imp/imp_system.h>
#include <imp/imp_framesource.h>
#include <imp/imp_encoder.h>
#include "sample-common.h"
#define TAG "Sample-Snap-RAW"
extern struct chn_conf chn[];
int main(int argc, char *argv[])
{
int ret;
IMPFrameInfo *frame_bak;
IMPFSChnAttr fs_chn_attr[2];
FILE *fp;
fp = fopen("/tmp/snap.yuv", "wb");
if(fp == NULL) {
IMP_LOG_ERR(TAG, "%s(%d):open error !\n", __func__, __LINE__);
return -1;
}
/* Step.1 System init */
ret = sample_system_init();
if (ret < 0) {
IMP_LOG_ERR(TAG, "IMP_System_Init() failed\n");
return -1;
}
/* Step.2 FrameSource init */
if (chn[0].enable) {
ret = IMP_FrameSource_CreateChn(chn[0].index, &chn[0].fs_chn_attr);
if(ret < 0){
IMP_LOG_ERR(TAG, "IMP_FrameSource_CreateChn(chn%d) error !\n", chn[0].index);
return -1;
}
ret = IMP_FrameSource_SetChnAttr(chn[0].index, &chn[0].fs_chn_attr);
if (ret < 0) {
IMP_LOG_ERR(TAG, "IMP_FrameSource_SetChnAttr(chn%d) error !\n", chn[0].index);
return -1;
}
}
/* Step.3 Snap raw config */
ret = IMP_FrameSource_GetChnAttr(0, &fs_chn_attr[0]);
if (ret < 0) {
IMP_LOG_ERR(TAG, "%s(%d):IMP_FrameSource_GetChnAttr failed\n", __func__, __LINE__);
return -1;
}
#if 0
ret = IMP_ISP_Tuning_SetISPBypass(IMPISP_TUNING_OPS_MODE_DISABLE);
if (ret < 0) {
IMP_LOG_ERR(TAG, "%s(%d):IMP_ISP_Tuning_SetISPBpass failed\n", __func__, __LINE__);
return -1;
}
#endif
fs_chn_attr[0].pixFmt = PIX_FMT_NV12;//PIX_FMT_YUYV422;
ret = IMP_FrameSource_SetChnAttr(0, &fs_chn_attr[0]);
if (ret < 0) {
IMP_LOG_ERR(TAG, "%s(%d):IMP_FrameSource_SetChnAttr failed\n", __func__, __LINE__);
return -1;
}
/* Step.3 config sensor reg to output colrbar raw data*/
/* to do */
/* Step.4 Stream On */
if (chn[0].enable){
ret = IMP_FrameSource_EnableChn(chn[0].index);
if (ret < 0) {
IMP_LOG_ERR(TAG, "IMP_FrameSource_EnableChn(%d) error: %d\n", ret, chn[0].index);
return -1;
}
}
/* Step.4 Snap raw */
ret = IMP_FrameSource_SetFrameDepth(0, 1);
if (ret < 0) {
IMP_LOG_ERR(TAG, "%s(%d):IMP_FrameSource_SetFrameDepth failed\n", __func__, __LINE__);
return -1;
}
int m = 0;
for (m=1;m<=51;m++) {
ret = IMP_FrameSource_GetFrame(0, &frame_bak);
if (ret < 0) {
IMP_LOG_ERR(TAG, "%s(%d):IMP_FrameSource_GetFrame failed\n", __func__, __LINE__);
return -1;
}
if(m%50==0) {
fwrite((void *)frame_bak->virAddr, frame_bak->size, 1, fp);
fclose(fp);
}
IMP_FrameSource_ReleaseFrame(0, frame_bak);
if (ret < 0) {
IMP_LOG_ERR(TAG, "%s(%d):IMP_FrameSource_ReleaseFrame failed\n", __func__, __LINE__);
return -1;
}
}
ret = IMP_FrameSource_SetFrameDepth(0, 0);
if (ret < 0) {
IMP_LOG_ERR(TAG, "%s(%d):IMP_FrameSource_SetFrameDepth failed\n", __func__, __LINE__);
return -1;
}
/* end */
#if 0
ret = IMP_ISP_Tuning_SetISPBypass(IMPISP_TUNING_OPS_MODE_ENABLE);
if (ret < 0) {
IMP_LOG_ERR(TAG, "error:(%s,%d),IMP_ISP_Tuning_SetISPBypass failed.\n",__func__,__LINE__);
return -1;
}
#endif
/* Step.5 Stream Off */
if (chn[0].enable){
ret = IMP_FrameSource_DisableChn(chn[0].index);
if (ret < 0) {
IMP_LOG_ERR(TAG, "IMP_FrameSource_DisableChn(%d) error: %d\n", ret, chn[0].index);
return -1;
}
}
/* Step.6 FrameSource exit */
if (chn[0].enable) {
/*Destroy channel i*/
ret = IMP_FrameSource_DestroyChn(0);
if (ret < 0) {
IMP_LOG_ERR(TAG, "IMP_FrameSource_DestroyChn() error: %d\n", ret);
return -1;
}
}
/* Step.7 recover sensor reg to output normal image*/
/* to do */
/* Step.8 System exit */
ret = sample_system_exit();
if (ret < 0) {
IMP_LOG_ERR(TAG, "sample_system_exit() failed\n");
return -1;
}
return 0;
}原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号